一种从粗到精逐步细化的变尺度光栅投影测量方法
2015-06-27王选择吴雅君
王选择,吴雅君,何 涛
引言
光栅投影测量法根据变形光栅图像中像素的灰度值变化,解算出代表物体高度的相位信息,经由相位展开和系统标定获得物体的三维信息[1-2]。因此,对光栅条纹的相位处理是获取高精度测量结果的重要环节。
相位处理方法主要有傅里叶变换法[3]和相移法[4]。前者对表面存在台阶和边缘位置测量会产生频谱拓延,且计算量大。后者通过对投影光栅进行移相,由相移公式计算相位,对于台阶的测量存在高度限制[5-6]。同时,相移法得到的仅是包裹相位,还需进行解包裹运算。解包裹算法一般根据包裹相位图特性解包,如基于统计滤波法[7]、基于可靠性法[8-10]等,要求空间相位具有连续性,对于表面高度存在突变物体的测量,容易出现“拉线”问题[11]。
为了不受台阶高度限制,同时保证解相位高分辨率,提出一种逐步细化的变尺度光栅投影测量方法,通过衔接算法,直接获取高分辨率的相位信息。
1 光栅条纹的设计
1.1 设计原理
光栅投影测量法一般采用正弦光栅进行投影,投影光栅表达为

式中:(u,v)为投影面像素点坐标;I(u,v)为(u,v)点灰度值;I0为背景光强;IA为调制强度;θ(u,v)为光栅相位;u0为投影面中心点横坐标。投影仪分辨率为8位,即28=256,变化范围为0~255,故取其中间值叠加一定偏差量作为光强值,取I0=128,IA=127。
上式中T为周期长度,T越小,条纹越细密,分辨率越高。故传统相移法多采用单组尺寸较细的光栅测量包裹相位,求解绝对相位还需进行解包裹,而常规解包裹容易受遮挡、台阶等因素影响,导致成像相位非连续化,针对该问题,提出多组尺寸呈倍数的条纹扫描思想,以获取连续的相位场。
1.2 光栅条纹的设计特点
已知投影仪规格为960pixel×1 280pixel,实验设计5组平行于Y方向的条纹,T依次为1 280 pixel、160pixel、80pixel、40pixel与20pixel,即像素周期数T′分别为1、8、16、32、64。每组光栅条纹之间满足:中心行像素点灰度值是以中心列为原点的余弦形式,不同像素周期的每组条纹中心相位均为0相位。
对于粗条纹T1=1 280,θ1具有唯一性,且相位值在(-π,π)之间。对于细条纹,以T2=160为例,θ2值不唯一,相位值分布在(-8π,8π)之间。由于每组条纹相位的中心相位一致,相移步长一致,细条纹的相位是对粗条纹相位的细化放大,θ1、θ2满足一定的线性关系:

根据(3)式,得到不同尺寸条纹中每一像素点的映射关系,将多组离散相位场衔接得到连续相位场,攻克了传统条纹处理方法中相位场非连续的问题。
2 相移扫描方法
已知投影光栅分布形式,那么变形光栅光强表达式为:I(x,y)=I′0+I′Acos[φ(x,y)],忽略随机噪声,该方程就已包含了I′0、I′A、φ(x,y)3个未知数。因此,需要对投影光栅进行移相来增加常相位,获取多幅变形光栅图,联立方程求解相位场。
因此移相次数必须至少为3次,同时:1)相移光栅图越多,测量精度越高;2)采集图像数量越多,测量速度越慢。综合考虑采用16步相移,每组光栅条纹进行16次相移投影扫描,扫描方法如(4)式,扫描流程如图1所示。对于n组条纹,共需投影16×n次,得到16×n幅变形光栅图,为准确得到每点相位提供了条件。

图1 相移扫描流程图Fig.1 Flow chart of phase shift scanning
3 相位提取算法
3.1 包裹相位的简化求解
若用传统相移公式求16步相移包裹相位,计算繁琐且速度慢。针对以上问题,提出简化傅里叶变换法求解。若采样长度为T,采样数量为n,对信号Acos(ωt+φ)作傅里叶变换,即是分别用周期的正余弦离散信号与之相乘。又因为傅里叶变换具有正交性,因此在信号频率已知的情况下,求该信号的相位,仅需构造同频率的正余弦函数,分别与该信号相乘,求反正切函数值,即可得到包裹相位值。
已知具有16步相移的光栅投影是在一个周期中变化,即信号频率已知。对于某一像素点,由16幅相移图可以求出该点发生移相的16个灰度值zi。包裹相位可由下式求出:

该算法利用了傅里叶变换的思想,仅需16步乘法加法运算,简化计算;预先求出构造的正余弦函数值,提高了计算速度。
3.2 基于误差最小原则的绝对相位逐级估算方法
进行平板扫描实验,每组条纹得到16幅变形光栅图。取变形光栅图中某一行的像素点,求解出各像素点的包裹相位如图2,为不同像素周期T′下同一行像素点的包裹相位,对于T′=1的光栅条纹,如图2中①位置,在整个测量范围内具有唯一性,故其包裹相位即为绝对相位φ1(x,y)=φ1(x,y);对于T′=8的光栅条纹,从图中锯齿线的多相交点可以看出,此位置不唯一,包裹相位不等于绝对相位,联系位置①,选取位置②作为T′=8的绝对相位。
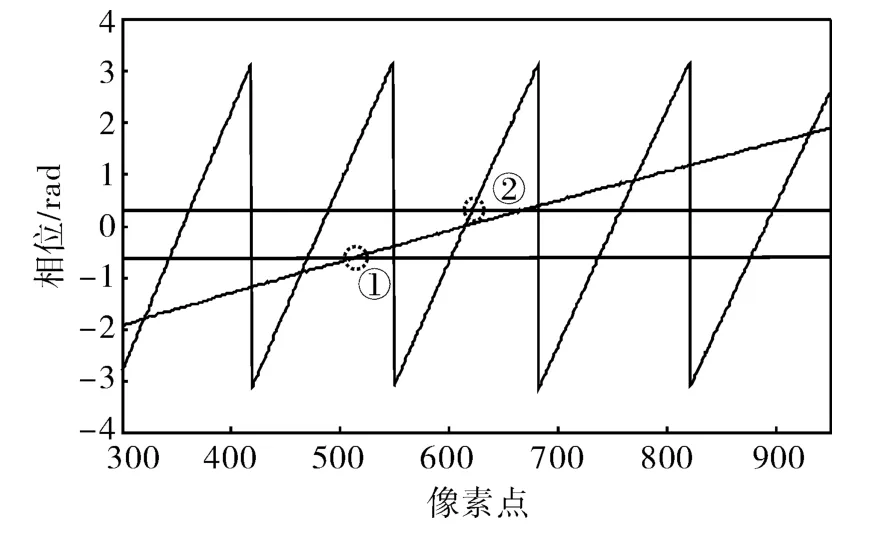
图2 各周期包裹相位图Fig.2 Wrapped phase image of different periods
由以上分析,可得绝对相位φ(x,y)=φ(x,y)+2kπ,式中(x,y)为变形光栅图中投影点(u,v)对应坐标点;φ(x,y)表示包裹相位值;k为(x,y)点所处的周期次数。提出用长周期条纹包裹相位φ(x,y)来估算短周期条纹绝对相位φ(x,y)。
以T1=1 280,T2=160两种周期宽度不同条纹为例。T1=8T2,理论上(3)式的包裹相位关系满足8φ1(x,y)=φ2(x,y)+2kπ,实际过程中考虑误差的影响,根据误差最小的原则:

式中,[]为取整运算。
利用φ1(x,y)估算φ2(x,y),对短周期T2条纹绝对相位的估算为对于T3=80的光栅条纹,利用φ2(x,y)估算

φ3(x,y)。由于T2=2T3,其绝对相位的估算为

同理可以估算出其他几种周期更短的条纹绝对相位。由此得到了被测表面每一点高度细化的绝对相位,减少了空间噪声与量化误差的影响。
4 实验及误差分析
实验在暗室中进行,将量程为0~100的投影仪亮度调整为60。利用光栅投影测量系统,对平板进行投影扫描,扫描速度为30Hz,其中3组条纹如图3所示。

图3 平板扫描实验结果Fig.3 Flat scanning experiment results
取平板上某一行的像素点,在5组光栅条纹投影条件下,求该行每一像素点的绝对相位值φi(x,y),并分别由T′=1、8、16、32的光栅绝对相位直接推测T′=64的光栅相位值。求出每一像素点推测值与绝对相位的差值,作为推测误差。推测误差的标准差反映了数据离散程度,故可认为是估算精度(如表1)。

表1 推测误差 radTable 1 Estimation error
将T′=64条纹的绝对相位值作为标准相位,对该相位场进行二次曲线拟合(如图4),在绝对相位(-64π,64π)的变化范围内,拟合标准差为0.096 63rad,达到了较高精度的解相位结果。

图4 T′=64条纹解相位及拟合误差结果Fig.4 Unwrapping phase and fitting error of T′=64
实验得出:投影光栅尺寸越细化,分辨率越高,测得的绝对相位越准确。32周期的估算精度比直接由T′=1推测T′=64估算精度提高了97.11%。同时,由以上实验结果可以看出,从T′=1直接跃迁到T′=64是可行的,这是由于本实验处于较理想的光照条件。因此在实际光照条件好的情况下,仅需要2组条纹进行扫描即可。对于照明条件不理想的情况,可以取多组(3组及3组以上)尺寸不同的光栅来获取较高的测量精度。
如图4所示,拟合存在一个正弦误差。这是由于实验中噪声和投影过程中非线性等因素的影响,投影光栅并不满足标准正弦分布,导致了相位求取的误差。针对该问题,需要对投影出的光栅条纹非正弦性进行校正。具体可采用二次拟合法:第一次拟合,将所有投影点参与正弦拟合,寻找合理的斜率加权误差阈值,剔除误差大的点;第二次拟合,将剔除粗大误差后的有效点进行正弦拟合,由该正弦曲线求取初相位,从而提高了相位的拟合精度。
5 结论
基于经典相移法,提出变尺度光栅投影测量方法,解决了传统条纹处理方法中相位场非连续的问题,基于误差最小原则实现了对绝对相位的逐级估算。通过实验,验证了该方法可以直接求取较高精度的绝对相位值,并且针对不同光照条件给出了设计条纹组数的建议。
[1] Da Feipeng,Gai Shaoyan.Grating projection of 3D precision measurement[M].Beijing:Science Press,2011.
达飞鹏,盖绍彦.光栅投影三维精密测量[M].北京:科学出版社,2011.
[2] An dong,Da Feipeng,Gai shaoyan,et al.New system calibration method based on fringe projection profilometry[J].Journal of Applied Optics,2014,35(1):81-84.
安冬,达飞鹏,盖绍彦,等.新的基于条纹投影轮廓测量的系统标定方法[J].应用光学,2014,35(1):81-84.
[3] Takeda M,Mutoh K.Fourier transform profilometry for the automatic measurement 3-D object shapes[J].Applied Optics,1983,22(24):3977-3982.
[4] Srinivasan V,Liu H C,Haliou M.Automated phase-measuring profilometry of 3-D diffuse objects[J].Applied Optics,1984,23(18):3105-3108.
[5] Creath K.Step height measurement using two-wavelength phase-shifting interferometry[J].Applied Optics,1987,26(14):2810-2816.
[6] Zhang H,Chen W,Tan Y.Phase-unwrapping algorithm for the measurement of three dimensional object shapes[J].Applied Optics,1994,33(20):4497-4500.
[7] Yang Fujun,Yun Dazhen.Phase recovery from a single speckle fringe pattern based on statistical filtering[J].Acta Optica Sinica,2002,22(8):952-956.
杨福俊,云大真.基于统计滤波的单幅散斑条纹图的相位恢复技术[J].光学学报,2002,22(8):952-956.
[8] Su Xianyu,Chen Wenjing.Reliability-guided phase unwrapping algorithm:a review[J].Optics and Lasers in Engineering,2004,42(3):245-261.
[9] Li S,Wang X,Su X,et al.Two-dimensional wavelet transform for reliability-guided phase unwrapping in optical fringe pattern analysis[J].Applied Optics,2012,51(12):2026-2034.
[10]Li S K,Chen W J,Su X Y.Reliability-guided phase unwrapping in wavelet-transform profilometry[J].Applied Optics,2008,47(18):3369-3377.
[11]Gai S Y,Da F P.A novel phase-shifting method based on strip marker[J].Optics and Lasers in Engineering,2010,48(10):10704-10719.
