一种便携式快速拆装超轻无人机的设计与实现
2015-06-27曹启武龙泽翔陈克俭
李 源,曹启武,2,卢 翔,龙泽翔,陈克俭
(1. 中国民航大学航空工程学院 天津300300;2. 上海飞机客户服务有限公司 上海200241)
一种便携式快速拆装超轻无人机的设计与实现
李 源1,曹启武1,2,卢 翔1,龙泽翔1,陈克俭1
(1. 中国民航大学航空工程学院 天津300300;2. 上海飞机客户服务有限公司 上海200241)
针对传统小型无人飞行器的自重大、单人携带不便、外场组装和拆卸耗费时间过长等问题,设计和实现了一种便携式快速拆装超轻无人机。该款无人机解决了传统无人机有效装载量小和便携性不好等问题,能够实现外场快速拆装,大大提高了工作效率。设计制作及飞行试验结果验证了设计方案的可行性与实用性。
无人机 便携 快速拆装 设计
传统小型无人飞行器的自重占最大起飞重量的比例较大,导致单机有效装载量下降,除伞降方式之外需要较大的进近空域和较长的降落跑道,单人携带不便,外场组装和拆卸耗费时间过长。如果设计一种自重超轻,可拆卸装箱,利用快速连接方式进行组装的无人飞行器,既可以解决传统无人机的有效装载量较小的问题和便携性问题,还能够实现快速拆装,进而提高在外场工作环境下的工作效率。为了实现上述功能特点,基于无人机及其制造技术设计与制作了一种便携式快速拆装超轻无人机。
1 整机技术方案
在便携式快速拆装超轻无人机中,机翼分为可拆卸的三段,即左段翼、中央翼和右段翼;机身分为前机身、垂尾段机身和平尾段机身,其中前机身和中央翼组合成中央翼盒,并集成起落架。将垂尾与垂尾段机身进行组合,将平尾和平尾段机身进行组合。将所有的机体部件进行空间排布之后,正好可装进一个外部尺寸为1000mm×400mm×400mm的收纳箱中。此箱尺寸正好适合大多数私家车的后排座位和后备箱尺寸,外加背带更便于单人携带,故具有较好的便携性。
整机制造材料采用低密度巴尔沙木,采用碳纤维与凯夫拉纤维加强的方式制成复合材料。在各连接处预埋铝片并在铝片上打铆钉孔,利用拉铆方式进行连接。飞机设计自重800g,最大设计起飞重量5kg。
1.1 机翼设计
1.1.1 机翼的平面形状及几何参数
梯形机翼能兼顾椭圆形机翼的气动性和矩形机翼的工艺。飞机拆卸后可装进外部尺寸为1000mm×400mm× 400mm的收纳箱中。据以上两点初步确定机翼平面形状。翼根弦长cr为363mm,翼尖弦长ct为226mm,机翼平面形状为各翼肋1 4弦长处连线为一条直线的梯形;翼展l为2280mm,分为左段翼、中央翼、右段翼,长度分别为950mm、380mm、950mm。
1.1.2 翼型选择
此无人机主要用途为航拍测绘、侦查搜寻和空对地物资投放,需具有一定的装载能力及低空低速巡航能力,翼型选择方向为弯度较大的低速翼型。设定常用巡航高度为20m,巡航速度为11m/s。
计算雷诺数为225411,选出CLARK Y、MH112、MH113、MH114、MH116几种翼型进行分析(见图1),雷诺数取225000。在不同迎角下,MH114表现出的升阻比最佳(见图2),故选择MH114作为大翼的翼型。

图1 初步选出的翼型Fig.1 Preliminary selected airfoils
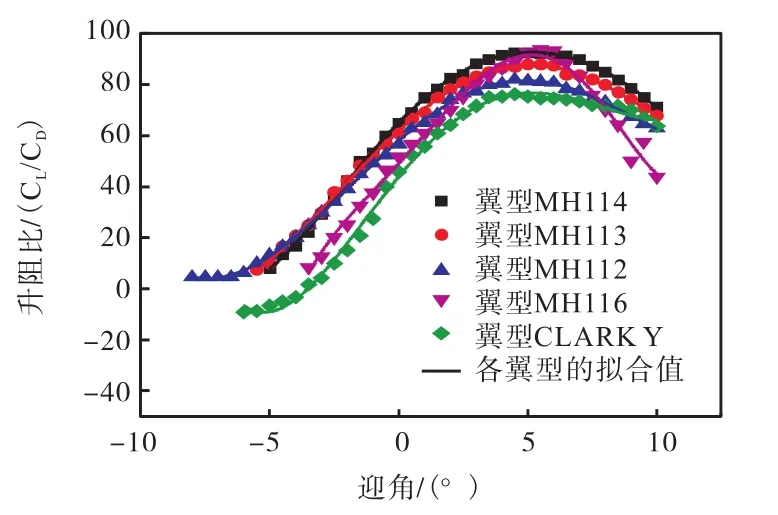
图2 各翼型升阻比的比较Fig.2 Airfoil lift-drag ratio comparison
1.1.3 机翼焦点
翼型有焦点,机翼也有焦点,作用在机翼上的气动力对该点的力矩不随迎角变化。低速时机翼焦点的位置取决于机翼的平面形状和剖面形状。对于展弦比λ≥4、后掠角χ1/4≤30°的无扭转机翼,其焦点F大约在1 4平均气动弦长处。此无人机机翼的后掠角χ1/4=0°,其1 4平均气动弦长点在机体中轴线上的投影即为1 4翼根弦长点,即机翼的焦点在1 4翼根弦长处。
1.1.4 机翼的升力系数展弦比修正
有限翼展机翼,由于上下翼面压力差,会产生翼尖涡流。翼尖涡流对整个机翼气流流动影响主要表现为:减少了上下翼面的压力差,使升力减小;减小机翼各部分实际迎角,使机翼产生的总升力系数减小,机翼迎角减小的数值称为诱导迎角Δα;使机翼后的气流向下倾斜(所谓下洗流),增加了阻力。
在本文中,机翼的升力系数用CL表示,翼型的升力系数用Cl表示。机翼产生的升力系数在小迎角时与绝对迎角成正比,所以升力系数曲线开头是一条近似的直线,且认为在不同迎角下升力线斜率不相等。理论上诱导迎角的大小等于下洗角的一半,即:

式中:CLα——在迎角为α时机翼的升力系数。
设翼型的升力系数曲线已知,可求出翼型升力曲线的斜率dCldα。有时可以认为升力线斜率等于翼型迎角为α时翼型的升力系数Clα与翼型绝对迎角αabs(绝对迎角即翼型零升力迎角0α与翼型迎角α数值之和)的比值,并用Bα表示

如果机翼展弦比是λ(不是无穷大),那么机翼升力系数曲线斜率受诱导迎角的影响也将改变,机翼升力系数要达与Clα相同的值,机翼迎角需加上诱导迎角Δα。则机翼升力线斜率是:
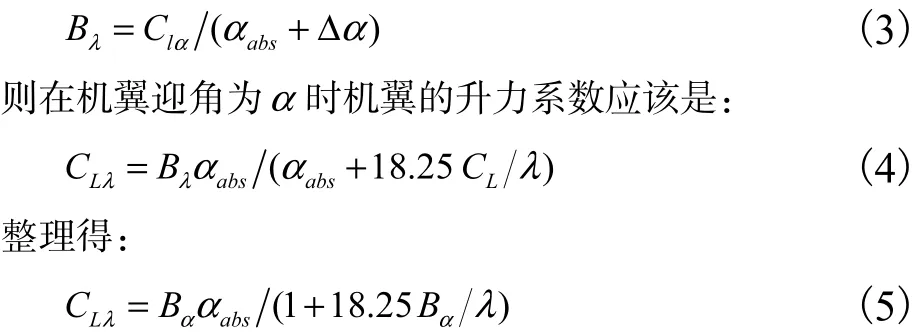
式中:CLλ——在机翼迎角为α、展弦比为λ时的机翼升力系数;Bα——翼型迎角为α时翼型升力系数曲线斜率。
在迎角为5°时,翼型升力系数Cl为1.32,翼型的零升迎角α0为-7°。由式(1)~(5)计算分别得到:诱导迎角Δα= 2.4710°;翼型升力线斜率Bα=0.11;机翼升力线斜率Bλα= 0.0912;5°迎角下机翼升力系数CLλ=1.0482;对−5~10°迎角下的机翼升力系数进行修正,结果略。
1.1.5 机翼的阻力系数展弦比修正
机翼阻力系数除了翼型阻力系数(称为废阻力系数)CD0外还应包括诱导阻力系数CDi,即:

λ——机翼展弦比;
π——圆周率;
ki——机翼平面形状修正系数,与机翼后掠角有很大关系,平直机翼或后掠角小于30°机翼约等于1.05~1.30,后掠角增大则ki值变大,三角翼约为1.55~1.57。
所以机翼阻力系数:

在5°迎角时,翼型阻力系数CD为0.014。由于本设计机翼平面形状为梯形,且焦点连线后掠角χ1/4为0°,故取机翼平面修正系数ki为1.05。
由式(6)和式(7)计算分别得到诱导阻力系数CDi=0.0752;机翼阻力系数CD=0.089 2;对−5~10°迎角下的机翼阻力系数进行修正,结果略。
1.1.6 机翼安装角设计
气流以一定的角度流经翼型时会出现偏转,导致翼型前方的上洗和后方的下洗。流线的运动就好像在原本机翼的位置放置一团旋转的空气柱,即附着涡。此附着涡使机翼前方气流存在上洗,上洗气流会减小迎角。故在设计时,安装角θ应该是取得最大升阻比的迎角αm加上上洗角。而上洗角即为诱导迎角,故上洗角表达式为:


式中:θ——机翼安装角;αm——取得最大升阻比的迎角;Δα为上洗角。由式(8)和式(9)计算得到上洗角Δα=1.5233;机翼安装角θ=1.5233。为制作简便,安装角取1.5°。
1.2 平尾设计
1.2.1 平尾的平面形状及几何参数
为保证平尾不比机翼先失速,平尾展弦比较小,对于大展弦比机翼飞机:平尾展弦比λ≈3~5。设定平尾翼根弦长chr为198mm,翼尖弦长cht为158mm,展长lh为760mm,尾翼的平面形状为后缘在一条直线上的直角梯形。
1.2.2 平尾翼型选择
对于正常布局的平尾,翼型大多采用对称翼型或反弯翼型。对于低速飞机,翼型的相对厚度约为10%~15%。本设计案例选择平尾翼型为NACA0010,是一个无弯度,厚10%的翼型。
1.2.3 几何法确定平尾平均气动弦及焦点
对于平直的带有梯度的机翼,可以采用图3的方法确定焦点。可得平尾的平均气动弦长为178.750mm,平尾焦点的位置为翼根弦距前缘63.9400mm处。即平尾焦点与平尾翼根弦前缘距离lh1为63.9400mm。

图3 几何法确定平尾焦点Fig.3 Using geometry method to determine horizontal tail aerodynamic center
1.2.4 平尾尾力臂及尾容量
本设计案例中,取平尾尾力臂为平尾焦点到机翼焦点的距离。在平尾与平尾段机身进行组装时,平尾前缘桁条与平尾段机身上的定位孔进行配合,定位孔前端距机翼焦点的距离lh2为1018.2100mm。
平尾尾力臂为:

平尾尾容量为:

式中:L平尾——平尾尾力臂;S平尾——平尾面积;S——机翼面积;cA——平均气动弦长。
由式(10)和式(11)计算得到:

1.2.5 平尾安装角设计
所有水平尾翼的设计和安装都必须考虑水平尾翼处机翼对气流的下洗效应。机翼的展弦比越小,机身越短,下洗效应就越强。结果是水平尾翼的实际迎角常常比设计的几何迎角小得多。在机翼后的下洗角近似由下面的公式给出:

式中:CL——机翼升力系数;λ——展弦比。
由式(12)计算得到下洗角ε(°)=2.9215。对于正常式布局,在水平尾翼处翼尖涡已经几乎完成了“卷起”,就形成了单一的大的翼尖涡,平尾前的几何迎角进一步减小。如果将平尾设计成零升平尾,则来流角即为机翼后的下洗角,能消除平尾的翼尖涡阻。由于平尾翼型为对称翼型,故只需平尾处来流迎角为0°,就能实现零升,故安装角取2.9°。
1.3 垂尾设计
1.3.1 垂尾的平面形状及几何参数
垂尾翼根弦长cvr为337mm,翼尖弦长cvt为203mm,展长lh为331mm,尾翼的平面形状为翼弦1 4连线的后掠角为19°的梯形。
1.3.2 几何法确定垂尾焦点
垂尾与机翼和平尾的不同点在于垂尾是个半翼,其焦点仍可使用几何法进行确定(见图4)。

图4 几何法确定垂尾焦点Fig.4Using geometry method to determine vertical tail aerodynamic center
可得垂尾的平均气动弦长为275.54mm,垂尾焦点的位置为翼根弦距前缘136.97mm处。即垂尾焦点与垂尾翼根弦前缘距离lv1为136.97mm。
1.3.3 垂尾尾力臂及尾容量
尾力臂为垂尾平均气动弦1 4弦点至机翼平均气动弦1 4弦点之距离,在垂尾与垂尾段机身进行组装时,垂尾前缘桁条与垂尾段机身上的定位孔进行配合,定位孔前端距机翼焦点的距离lv2为890.5600mm。
垂尾尾力臂:

垂尾尾容量:

式中:L垂尾——垂尾尾力臂;S垂尾——垂尾面积;S——机翼面积;L——机翼展长。
2 整机参数
2.1 整机焦点确定
无人飞机的水平尾翼也有自己的焦点。当迎角变化时,水平尾翼的升力对其焦点的力矩不变,所以同样可以把水平尾翼的焦点看成是迎角变化时水平尾翼升力增量的作用点。如果将作用在机翼焦点上的机翼升力增量(ΔLW)和作用在水平尾翼焦点上的平尾升力增量(ΔLH)的合力作用点求出来,这个点就是整架无人飞机的焦点。当迎角变化时,整架无人飞机的升力增量也可以认为是作用在整架无人飞机的焦点上。
大多数无人飞机机翼的焦点在0.25弦长处。整架无人飞机的焦点位置可以近似用下式进行计算:

式中:XF——焦点离机翼前缘的距离,用机翼平均气动弦长度百分数表示;kF——考虑平尾受机翼后洗流等因素影响的修正系数(约0.7~0.8);SW——机翼面积;SH——平尾面积;lH——平尾尾力臂,即从重心到平尾焦点的距离;c——机翼弦长。
由式(13)得整机焦点XF=0.7956。即焦点离机翼前缘的距离为238.53mm处。
2.2 整机重心确定
飞机平尾设计为零升平尾,故在机翼上的力矩值应设计为零。根据机翼升力对焦点产生的力矩大小不随迎角改变而改变的这个性质,可以设想升力作用在焦点上,升力的力矩可用焦点力矩代替。若机翼上的力矩值为零,则升力对重心产生的力矩ML,阻力对重心产生的力矩MD与焦点力矩值M0之和应为零。
式中:ρ——空气密度,20℃时,取1.205kg m3;V——飞行速度;S——机翼面积;CL——机翼升力系数;X——重心距机翼焦点的前后距离。

式中:CD——机翼阻力系数;Y——重心距机翼焦点的上下距离。

式中:c——机翼平均气动弦长;mz0——焦点力矩系数,MH114翼型在0°迎角时,力矩系数为-0.1856。
由式(17)焦点力矩M0=-2.724 N·m,其中负号表示焦点力矩为低头力矩,将重心的上下位置设计在机翼焦点同一高度上,要确定重心的前后位置,只需要升力对重心的力矩和焦点力矩平衡即可。由式(15)可知升力对重心力矩ML=0.5× 1.205× 112×0.6715× 0.646 2×X;由式(16)可知阻力对重心力矩MD=0.5× 1.205× 112×0.0309× 0.646 2×Y ;取Y=0,得X=0.0861m。故重心位置位于焦点后86.1096mm处,即距离机翼前缘的176.8596mm处。
2.3 机体结构及连接方案
机翼分为3段,分别为左段翼、中央翼、右段翼。左端机翼,中央翼盒和右段机翼通过边翼翼缘连接铝片上的铆钉孔和中央翼缘连接铝片上的铆钉孔以拉铆的方式进行快速连接。左端机翼和右段机翼通过外伸出的边翼后墙插销和中央翼盒上的中央翼后墙插孔相配合作为提高机翼扭转刚度的机构。
3 结 论
运用小型低速无人机气动设计和结构设计方法,利用碳纤维复合材料成型技术及凯夫拉纤维加强技术,研发了一款便携式快速拆装超轻无人机。对该无人机总体布局、机翼、尾翼、机体结构和连接方式进行设计及试验验证,结果表明各项性能满足设计要求。
此无人机较传统小型无人机的主要优势在于:①整机制造材料采用低密度巴尔沙木,采用碳纤维与凯夫拉纤维加强的方式制成复合材料,使飞机在具有较大的承力能力的同时具有超轻的自重;②将所有的机身部件进行空间排布之后,正好可以装进一个尺寸为1000mm×400mm×400mm的收纳箱中,可以很轻松地放入普通家用轿车的后排,在箱子上加上背带后可以由单人进行携带,提高了飞机的便携性;③飞机在几分钟之内便可以完成开箱、组装和调试,大大缩短了各类任务的反应时间,极大地提高了工作效率。
该设计方案可为航拍测绘、侦查搜寻和空对地物资投放的无人机提供理论依据和工程应用指导。
[1] 傅职忠. 简明空气动力学[M]. 北京:中国民航出版社,2008.
[2] 钱翼稷. 空气动力学[M]. 北京:北京航空航天大学出版社,2004.
[3] 朱宝鎏. 模型飞机飞行原理[M]. 北京:航空工业出版社,2007.
[4] 马丁. 西蒙斯. 模型飞机空气动力学[M]. 北京:航空工业出版社,2007.
[5] 张锡金. 气动设计[M]. 飞机设计手册编委会. 飞机设计手册. 北京:航空工业出版社,2002.
[6] 顾诵芬,解思适. 飞机总体设计[M]. 北京:北京航空航天大学出版社,2001.
[7] 朱宝鎏. 无人飞机空气动力学[M]. 北京:航空工业出版社,2006.
A Portable Fast Assembly and Disassembly Lightweight UAV:Design and Realization
LI Yuan1,CAO Qiwu1,2,LU Xiang1,LONG Zexiang1,CHEN Kejian1
(1. College of Aeronautical Engineering,CAUC,Tianjin 300300,China;2.Shanghai Aircraft Customer Service Co.,Ltd.,Shanghai 200241,China)
As traditional small-scale UAVs have the shortcomings of heavy deadweight,carrying inconvenience,outfield assembly and long disassembling time,a portable,rapidly unassembled,ultra light UAV was designed and realized in this paper.This ultra light UAV overcomes the shortcomings of traditional UAVs,such as small valid loading capacity and inconvenience of carrying,achieves rapid assembly and disassembly at external work environments.Production and experiment on physical object proved the feasibility of this design.
UAV;portable;rapid assembly and disassembly;design
V221+.8
:A
:1006-8945(2015)08-0047-04
2015-07-08
