基于PI控制的双惯量弹性系统机械谐振的抑制
2015-06-26王璨杨明徐殿国
王璨,杨明,徐殿国
(哈尔滨工业大学电气与自动化工程学院,黑龙江哈尔滨150001)
实际伺服驱动系统中的机械传动部分由于弹性的存在必然会带来机械谐振,机械谐振会导致系统转矩、转速、机械装置等共同振荡。因此,机械振荡的研究以及抑制方法已经成为提高伺服驱动系统性能的一个重要课题[1]。
当今伺服驱动系统中,主要有两大类抑制机械谐振的措施,即被动方式和主动方式。被动方式就是在速度环输出与电流环给定之间插入陷波滤波器,而控制系统其它设计不变[2-4]。主动方式就是主动改变控制器参数或控制器结构用以消除谐振影响。主动方式可分为单纯PI控制(双自由度PI控制、RRC)[5-8]、基于PI的状态反馈控制[9-10]、其它高级算法应用[11-12]等多种方案。文献[6]采用单纯PI控制的主动谐振抑制方式,推导出单纯使用IP控制器的整定公式,并得到系统动态特性受负载/电机惯量比制约这一重要结论。本文在文献[6]的基础上,主要针对基于传统PI控制的双惯量弹性系统,首先建立其数学模型并推导传递函数;然后通过Simulink 仿真,对比刚性与弹性系统在未经优化PI参数下的阶跃响应;最终,利用3种极点配置法来优化控制器参数,从而达到谐振抑制的作用。
1 双惯量弹性系统建模
图1所示为双惯量弹性系统模型结构图。
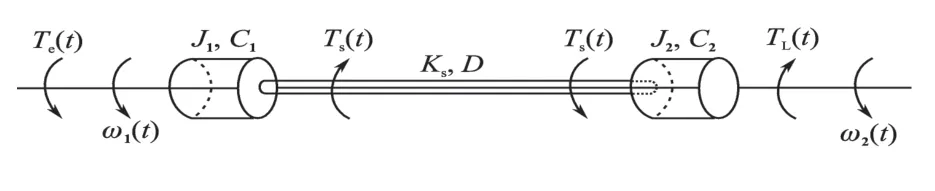
图1中,电机和执行机构通过传动轴系连接,传动轴系具有一定的抗扭刚度Ks且其阻尼系数为D。当传动轴系发生扭转形变时轴系将产生转矩Ts,转矩的大小受到轴系电机端与执行机构端旋转角的差值和轴系的机械阻尼影响。伺服驱动器控制电机运行,为电机的转轴提供电磁转矩Te。电机端电磁转矩Te和传动轴系转矩Ts作用于转动惯量J1、阻尼系数C1的电机转轴,对其速度产生影响。在执行机构端,执行机构具有大小为J2的等效转动惯量以及阻尼系数C2,传动轴系转矩Ts与负载转矩TL共同作用于执行机构,最终决定了执行机构的转速。
根据以上理论分析,建立如下微分方程组:
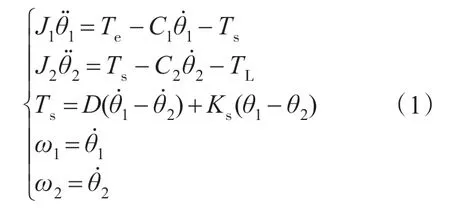
为了进一步分析机械模型,建立机械模型的框图和传递函数,需要对以上微分方程组进行拉普拉斯变换,同时忽略对系统影响较小的阻尼系数。由此可得化简后基于PI 控制的双惯量弹性系统框图如图2所示。
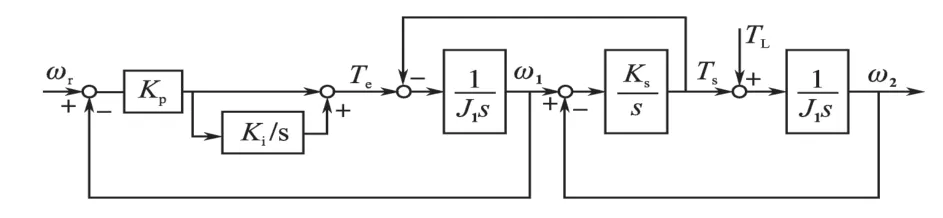
图2 带PI控制器的双惯量弹性系统框图Fig.2 Two-inertia elastic system block diagram with PI controller
由图2可求得以下3个传递函数:
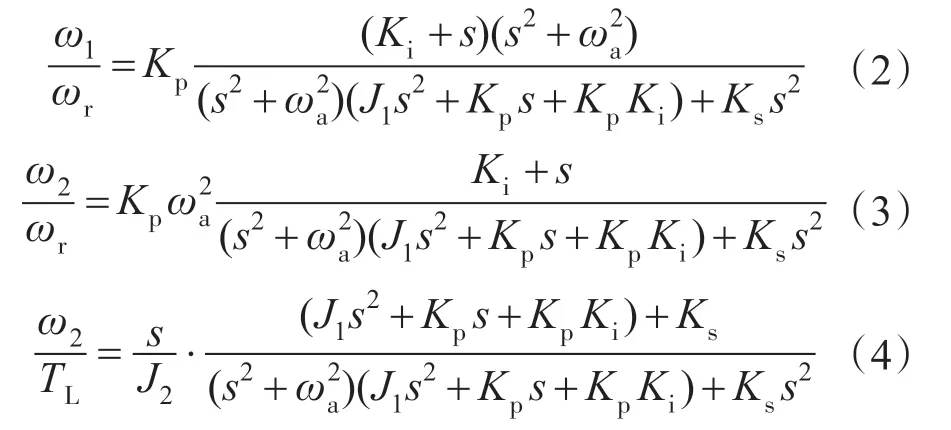
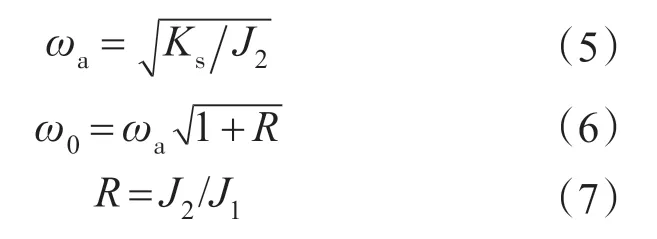
式中:ωa为抗谐振频率;ω0为固有谐振频率;R为负载/电机的惯量比。
它们的定义如下:
式(2)为机械系统驱动电机输出转速到给定转速的传递函数;式(3)为负载侧转速到给定转速的传递函数,即为系统整体的传递函数;式(4)为负载侧输出转速到扰动转矩的传递函数。
2 无谐振抑制的仿真对比
仿真完成于图2 所示的伺服驱动系统模型中。驱动电机额定功率为750 W,额定转矩为2.39 N·m,额定转速为3 000 r/min;传动轴扭转弹性系数Ks为6.6 N·m/rad;负载转动惯量J2为7.5×10-5kg·m2;驱动电机给定转速为20 rad/s;系统突加负载为2.4 N·m,于0.1 s后加入。式(7)表明,当惯量比给定,驱动电机转动惯量由负载转动惯量决定。首先,实验做于纯刚性双惯量系统中,此时的系统框图有所改变,如图3所示。
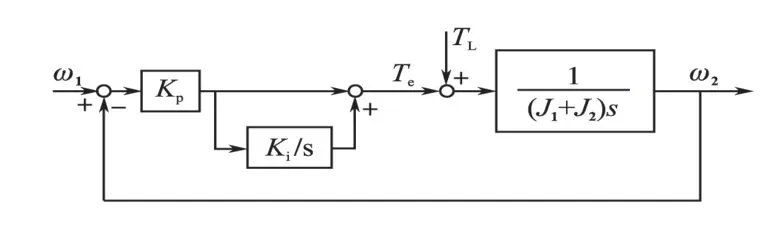
图3 纯刚性双惯量系统框图Fig.3 Block diagram of two-inertia system without elasticity
未考虑弹性负载时,根据工程法设计得到PI调节器参数KP为0.1,Ki为80,加入到如图3 所示的纯刚性系统中,在惯量比R=1,2时分别进行仿真实验,负载侧角速度阶跃响应如图4a 所示。
方便起见,仍取KP为0.1,Ki为80。与上面仿真不同的是,此时将参数加入到实际考虑弹性的系统模型中,框图见图2。该仿真实验分别在惯量比R=1,2时完成,负载侧角速度阶跃响应如图4b所示。

图4 阶跃响应Fig.4 Step response
可见,未考虑弹性负载而根据工程法设计得到的PI调节器参数对于纯刚性系统适用,但一经考虑实际系统的弹性,就会带来很大的振荡。下面,将利用极点配置法来优化PI 参数,适当减弱系统机械谐振。
3 3种极点配置法的比较
3.1 基本方程的建立
利用极点配置技术来计算控制器参数KP和Ki,首先应建立基本方程。将式(3)整理如下:
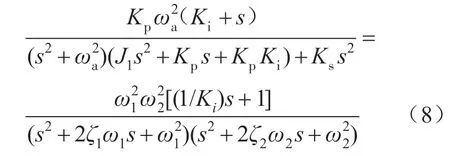
式中:ω1,ω2为自然角频率;ζ1,ζ2为阻尼系数。整理后得到如下4个方程:
可见,式中仅存在2个可调节参数(Kp,Ki),因此系统传递函数中的4个极点和1个零点不能得到自由配置。这里式(11)和式(12)为零极点位置的限制方程,特别是零点的位置取决于积分系数Ki。
3.2 相同半径的极点配置法
令4个极点具有相同的半径,零点位置在此基础上自然得到,如图5所示。ζ1与ζ2沿半径ω1=ω2的圆形轨道移动。ζ1与ζ2决定了系统的超调,如图6所示。
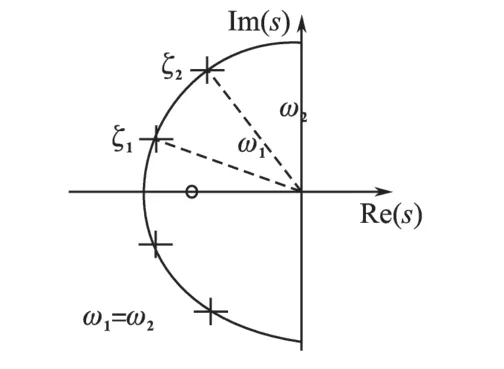
图5 相同半径的相点配置Fig.5 Pole placement with identical radius
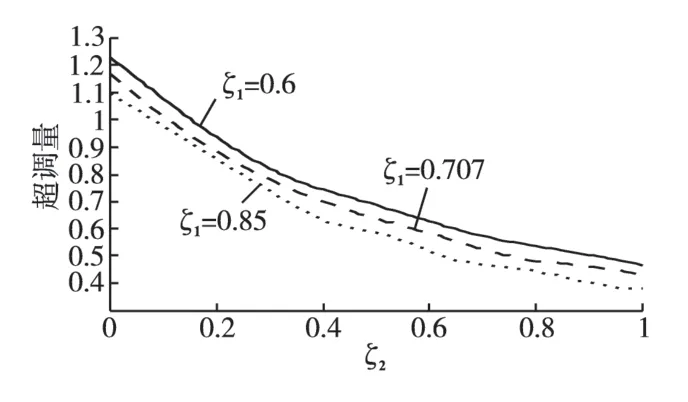
图6 相同半径的系统超调量Fig.6 Overshoot for identical radius
当ω1=ω2时,式(11)、式(12)化简如下:
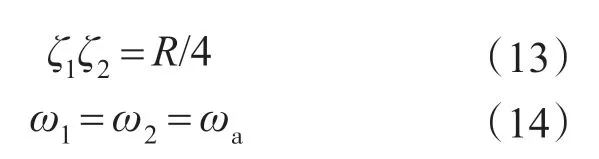
由max(ζ1,ζ2)≤1 可知,ζ1和ζ2的乘积应不超过1,因此从式(11)可知该极点配置法仅对R≤4的情况才是有效的。调节ζ1与ζ2,使ζ1·ζ2=(0.5~1)。图6表明,此时系统超调量较大。
仿真结果在图7 中给出,这里令ζ1=2ζ2=,在R=1与R=2做出仿真。图7表明,当2≤R≤4 时,系统的暂态响应表现出较好的超调量;当R<2时,系统表现出欠阻尼特性。
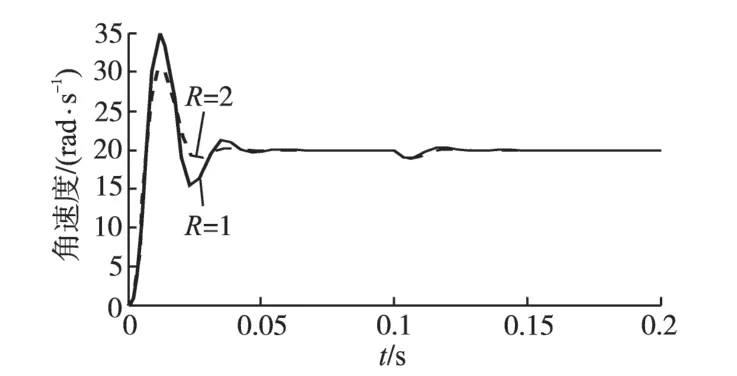
图7 相同半径法的阶跃响应Fig.7 Step responses for identical radius
3.3 相同阻尼系数的极点配置法
令4 个极点具有相同的阻尼系数,零点位置在此基础上自然得到,如图8所示。其中,ω1与ω2沿着ζ1=ζ2的虚线轨道移动。此外,随着阻尼系数的增大,系统超调逐渐变小,如图9所示。当ζ1≥0.7 时,系统的超调量低于50%;当ζ1≥0.85 时,系统的超调量低于40%。
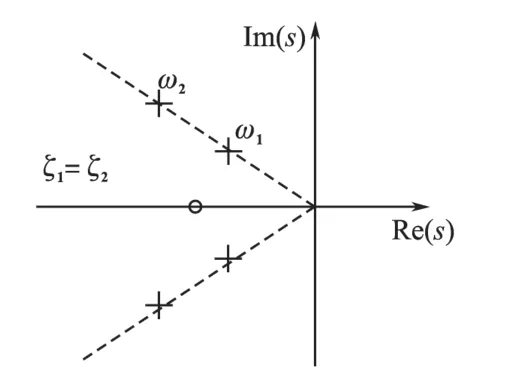
图8 相同阻尼系数的极点配置Fig.8 Pole placement with identical damping coefficient
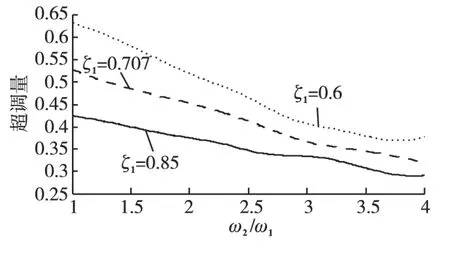
图9 相同阻尼系数的系统超调量Fig.9 Overshoot for identical damping coefficient
当两对共轭极点的阻尼系数相等时,限定式(11)、式(12)可化简为

ω1与ω2的表达式可直接由式(15)、式(16)得到:
由于ω1为非负实数,因此有
仿真结果见图10。当R=1,2 时,设计ζ1=;当R=4,5时,设计ζ1=0.707。该图表明当R≥2时,这种极点配置法可为系统提供较好的阻尼。
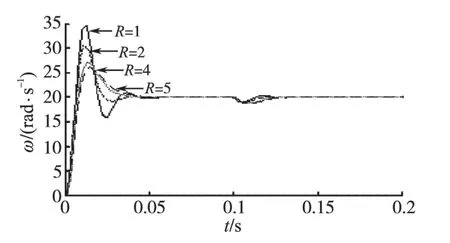
图10 相同阻尼系数的阶跃响应Fig.10 Step responses for identical damping coefficient
3.4 具有相同实部的极点配置法
令4 个极点具有相同的实部,零点位置在此基础上自然得到,如图11所示。图11中,ζ1与ζ2沿-ω1ζ1=-ω2ζ2的虚线路径移动。此外,从图12 可见,系统的超调量与ω2和ω1的比值有关,且随着ζ1的增加,系统的超调量在不断减小。当ζ1≥0.85时,超调量在50%以内。当4 个极点具有相同的实部时,限定方程可简化如下:

图11 相同实部的极点配置Fig.11 Pole placement with identical real part
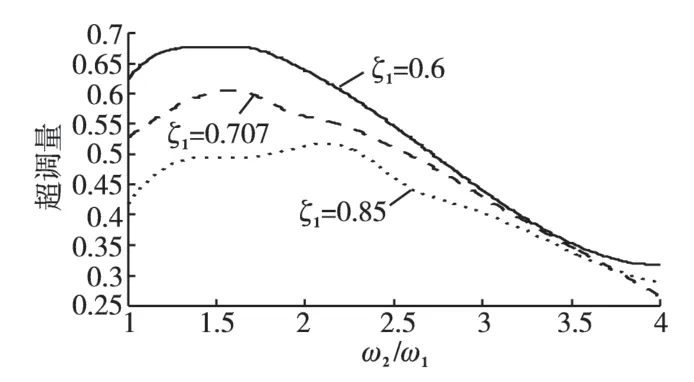
图12 相同实部的系统超调量Fig.12 Overshoot for identical real part
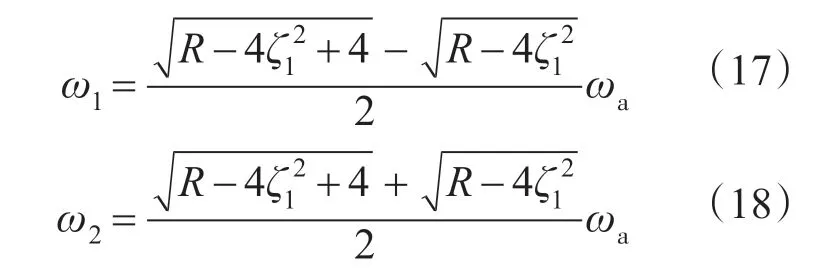
解这2个方程,得到ω1与ω2的表达式:
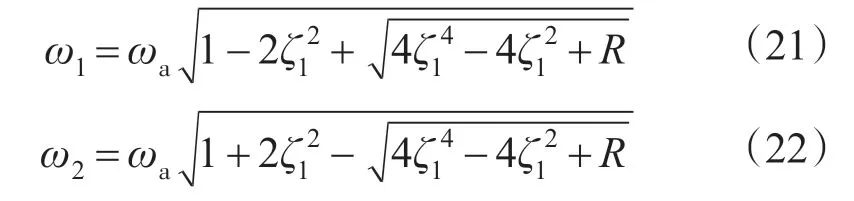
不失一般性,这里规定ω1≤ωa≤ω2,可以得到:

因为ζ1≤1,于是这里限定R≤4。尤其在时,可得ω1=ω2=ωa,此时,4个极点变成两对共轭根。
在R≠1的情况下,式(21)可变形成下式:

因为ω1是一个非负实数,于是,R和1的大小限制了ζ1的范围。下面针对不同惯量比R的范围给出ζ1的可调范围。
2)惯量比R=1。对于R=1 情况,ω1简化式可由式(20)得到:

因为ω1为非负实数,所以由式(21)与式(25)可得到0.5 ≤ζ1≤0.707。调节ζ1,使0.5 ≤ζ1≤0.707,此时,ω2与ζ2的表达式变为
这里选ζ1=0.6和0.65,仿真结果见图13中c,d曲线。该图表明当R=1时,系统体现出轻微的欠阻尼特性。
3)惯量比R<1。当R<1时,在方程(17)中令4ζ14-4ζ12+R≥0,再综合式(19),可得ζ1的可调范围为由此选择仿真参数,结果见图13 e,f 曲线所示。可见,当R<1时,该系统表现出较大的超调量,且当R不断减小时,系统的阻尼特性越来越差。
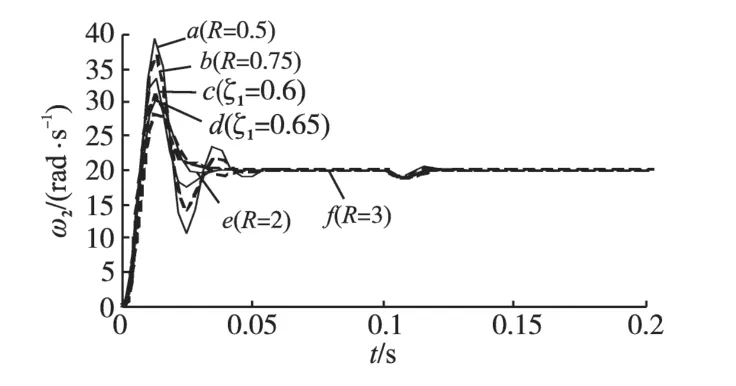
图13 相同实部的阶跃响应Fig.13 Step responses for identical real part
3.5 PI与IP控制器的比较
文献[6]中双惯量系统使用IP 控制器,引入两对共轭极点;与其相比,传统PI 控制器为双惯量4 阶系统多引入一个零点,而此零点位置不能得以自由配置。选用文献[6]中参数,分别对基于IP 与PI 控制的双惯量弹性系统进行阻尼特性仿真比较,超调量图形如图14所示,可见,零点的存在可使系统的超调量增大。在R=1时,分别做出两种系统经相同半径的极点配置法优化后的负载侧阶跃响应,如图15 所示。可见,零点的引入会带来较大振荡,但同时响应速度会加快。由于PI调节器在电力拖动系统中的广泛应用,体现出了本文研究的实效性。
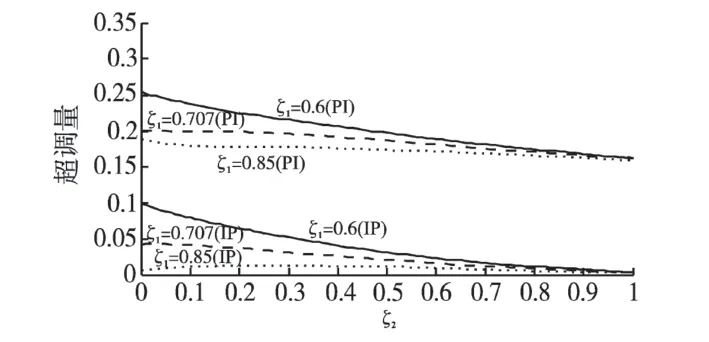
图14 IP与PI调节器为系统带来的超调量的比较Fig.14 Comparison of system overshoot carried by IP and PI regulator
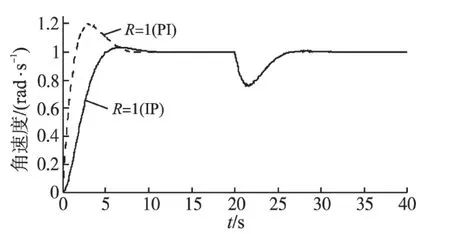
图15 IP与PI控制系统阶跃响应的比较Fig.15 Comparison of step response between PI and IP control system
4 结论
3种不同的极点配置方案表明系统阻尼特性与惯量比R密切相关,针对不同的R值,应选择不同的极点配置方案对机械谐振进行有效抑制。当1≤R<2,可选择具有相同实部的极点配置法;当2≤R≤4,3种方法均可提供系统良好的阻尼特性;当R>4,只可选择相同阻尼系数的极点配置法。但当R<1 时,3 种方法均使系统呈现欠阻尼特性。相比于IP控制,传统PI控制相当于在4阶系统基础上引入一个零点,因此导致较大超调。PI 控制器只能提供2 个可调变量,无法实现4 阶系统零极点的自由配置。为进一步提高系统的抗谐振能力,应引入状态反馈等控制策略来改善传统PI控制器零极点无法任意配置的缺陷。
[1]马小亮.驱动弹性负载的调速传动[J].电气传动,2008,38(7):3-7.
[2]Lennart Harnefors.Implementation of Resonant Controllers and Filters in Fixed-point Arithmetic[J].IEEE Trans.Ind.Electron,Apr.2009,56(4):1273-1281.
[3]Kang C I,Kim C H.An Adaptive Notch Filter for Suppressing Mechanical Resonance in High Track Density Disk Drives[J].Microsystem Technologies,2005,11(8-10):638-652.
[4]杨明,胡浩,徐殿国.永磁交流伺服系统机械谐振成因及其抑制[J].电机与控制学报,2012,16(2):79-84.
[5]Muszynski R,Deskur J.Damping of Torsional Vibrations in High-dynamic Industrial Drive[J].IEEE Trans.Ind.Electron.2010,57(2):544-552.
[6]Zhang GG,Furusho J.Speed Control of Two-inertia System by PI/PID Control[J].IEEE Trans.Ind.Electron.,2000,47(3):603-609.
[7]Katsura S,Ohnishi K.Force Servoing by Flexible Manipulator Based on Resonance Ratio Control[J].IEEE Trans.Ind.Electron.,2007,54(1):539-547.
[8]Hori Y,Sawada H,Chun Y.Slow Resonance Ratio Control for Vibration Suppression and Disturbance Rejection in Torsional System[J].IEEE Trans.Ind.Electron.1999,46(1):162-168.
[9]Dhaouadi R,Kubo K,Tobise M.Analysis and Compensation of Speed Drive Systems with Torsional Loads[J].IEEE Trans.Ind.Appl.1994,30(3):760-766.
[10]Szabat K,Orlowska-Kowalska T.Vibration Suppression in a Two-mass Drive System Using PI Speed Controller and Additional Feedbacks-comparative Study[J].IEEE Trans.Ind.Electron.2007,54(2):1193-1206.
[11]Hace A,Jezernik K,Šabanovic A.SMC with Disturbance Observer for a Linear Belt Drive[J].IEEE Trans.Ind.Electron.2007,54(6):3402-3412.
[12]Peter K,Schöling I,Orlik B.Robust Output-feedback H∞-control with a Nonlinear Observer for a Two-mass System[J].IEEE Trans.Ind.Appl.2003,39(3):637-644.