鱼眼图像识别技术在太阳跟踪系统中的应用
2015-06-24郑晓斌薛毓强
郑晓斌,薛毓强
(1.福建船政交通职业学院 机械工程系,福建 福州 350007; 2.福州大学 电气工程与自动化学院,福建 福州 350000)
鱼眼图像识别技术在太阳跟踪系统中的应用
郑晓斌1,薛毓强2
(1.福建船政交通职业学院 机械工程系,福建 福州 350007; 2.福州大学 电气工程与自动化学院,福建 福州 350000)
通过对鱼眼镜头拍摄的全景天空图像HIS颜色模型的处理,采用球面模式实现对鱼眼图像的平面快速转换,提取符合太阳区域的轮廓形状特征、面积特征以及动态偏移特征的高亮度光斑区域,计算太阳区域重心实现对太阳位置的精确定位.
HIS;鱼眼图像转换;太阳区域特征;太阳跟踪方法
太阳能作为绿色可再生能源,具有地域分布广、无污染等优点,深受大众青睐.但目前太阳能光伏发电系统存在总体利用效率低的难题,其解决办法主要有提高光伏电池组件的转换效率、增强光伏电池单位面积上的光照辐射强度和寻求光伏系统的最大功率输出点(即MPPT)3种[1].由于当前绝大多数太阳能电池板采用固定安装方式,无法实现太阳光线垂直照射电池板的接受面,加上太阳能量接收效率的余弦效应[2],造成光伏整体利用效率不高.
1 常见的太阳跟踪方法
通过跟踪定位太阳方位技术和多倍聚光技术,可使得光伏发电系统在相同的太阳光照强度下获得更多的太阳辐射能量,实现提高光伏发电效率和降低成本的目的.相关资料表明,与固定安装方式相比,采用太阳跟踪技术,保持太阳光线入射角垂直于太阳电池的接受面,系统将提高35%的发电能力[2-3].
太阳跟踪方法就是要确定当前太阳相对于光伏电池组件的高度角(altitude)和方位角(azimuth)2个参数,使得太阳能电池板的接受面自动跟踪太阳.目前常用的太阳跟踪算法主要有光强比较法、时钟定位法等.几种常见的太阳跟踪方法的原理及优缺点见表1.
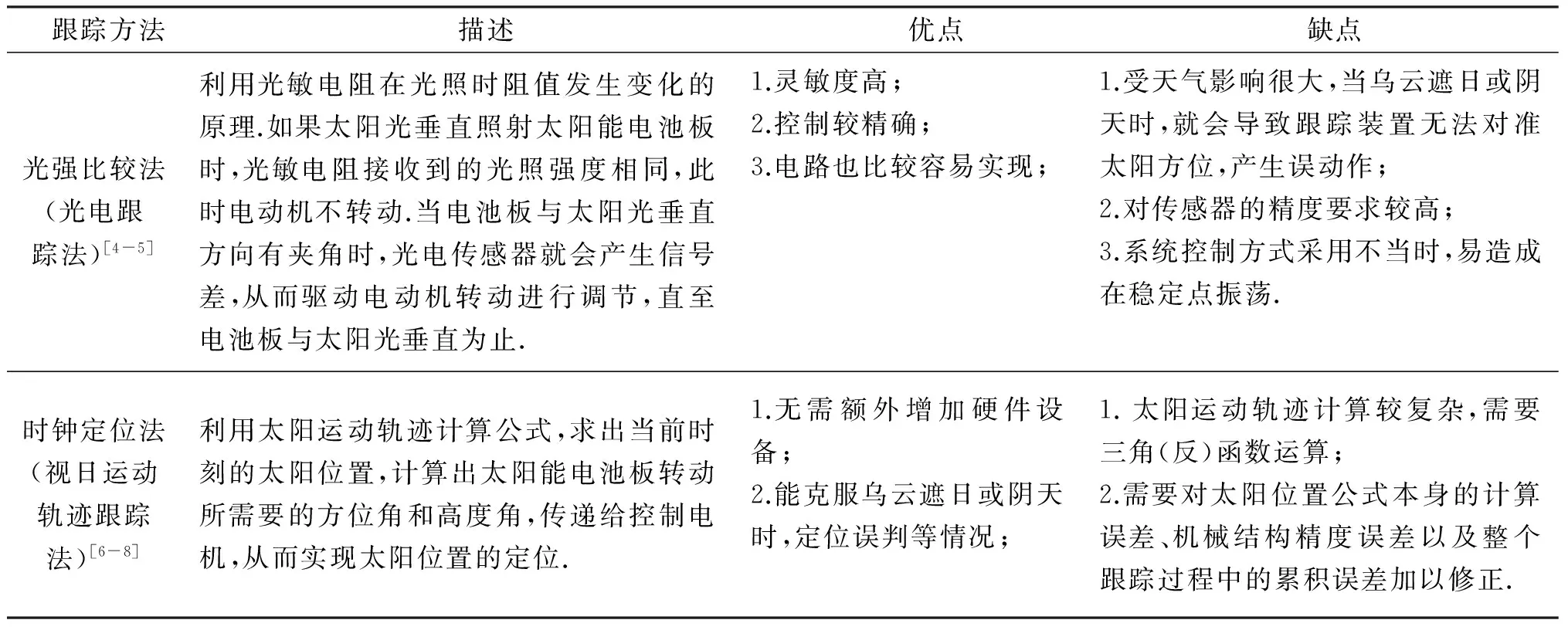
表1 几种常见的太阳跟踪方法的原理及优缺点
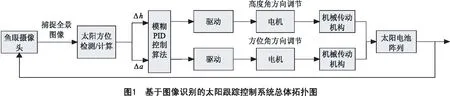
2 基于图像识别的太阳跟踪控制系统总体框架
本文采用天空全景图像识别定位方法可以有效消除太阳运动轨迹计算的误差.通过对全景图像进行转换处理、智能识别太阳光斑区,计算该区域的重心坐标,并与太阳光线入射角垂直时的中心坐标进行比较,以高度角坐标和方位角坐标偏差,驱动模糊PID控制器进行高度角和方位角的调节.该控制方法能自动辨识由云朵、飞机等其他飞行物造成遮挡或反光所造成的定位误判的问题,使得定位更加准确.图1为基于图像识别的太阳跟踪控制系统总体拓扑图.
3 鱼眼图像识别太阳光定位设计
3.1 鱼眼图像识别定位设计原理
基于图像识别定位的原理就是利用在晴朗的天空图像中,太阳图像占据亮度最高的区域这一特点,试图通过对天空图像的处理和座标变换后就得到太阳的位置.
在北回归线以北地区,从地面上观测到的太阳运动轨迹可近似为太阳中心点自东向西方向画出的一条半圆弧线,其方位角的变化不超过 180°(北回归线以南、南回归线以北的方位角大于180°).然而一般的固定式广角镜头只能获得62°~76°的视角,无法一次捕捉天空全景图.而鱼眼镜头(Fish-Eye Lens)是一种焦距在6~16 mm之间的超广角短焦距镜头,其镜头前部凸出呈抛物状,其最大的特点就是视角范围最大可达230°.
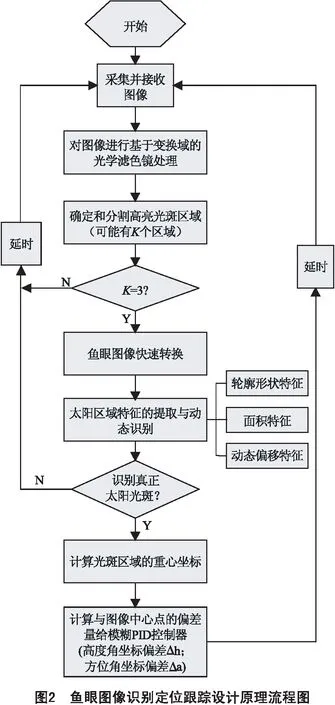
鱼眼图像识别定位设计原理是模仿人眼对亮度敏感程度高的特点,首先对获得的全景天空图像进行HIS颜色模式的变换处理,凸显全景图像中高亮度区域;然后对经过鱼眼图像平面转化后的高亮度区域,依据外形轮廓、变化偏移量以及面积大小等特征信息进行判断,识别出真正的太阳光斑区域;最后计算太阳光斑区重心点,并与太阳光线入射角垂直时的中心坐标进行比较(即图像篇幅的中心点),得到高度角坐标和方位角坐标偏差,提供给控制器以实现太阳光源全方位准确的动态定位[9].鱼眼图像识别定位跟踪设计原理流程图如图2所示.
3.2 识别鱼眼睛图像中的高亮度点
根据图像中的高亮区域即可能是太阳光斑区这先知条件,首先要识别出鱼眼睛图像中的高亮度点[10].依据人体仿生学中,人眼对亮度的敏感程度高于对色度的敏感,因此需要将图像传感器得到RGB颜色模型转换为以色调、饱和度和强度为基本特征的HSI颜色模型,其转换公式如下为:
(1)
其中:

(2)
通过上述转换可得到HSI颜色模式的鱼眼图像[10]:
F(x,y)={H(x,y),S(x,y),I(x,y)}.
(3)
对得到的 HSI颜色模式的鱼眼图像,可以通过修改图像色调H、饱和度S和亮度I属性的敏感度加权系数的权重方式对图像进行优化处理,改进后的HSI颜色模式的鱼眼图像公式如下:
F′(x,y)={KHH(x,y),KSS(x,y),KII(x,y)}={H′(x,y),S′(x,y),I′(x,y)}.
(4)
式中KH、KS、KI分别为设定的色度、饱和度和亮度的敏感度加权系数.
经过多次的实验比较,当KH=0.15、KS=0.30、KI=0.65时,可以有效地消除图像纹理噪声、淡化背景颜色以及突出亮度区域,从而达到快速判定高亮度点的目的[11-13].


(5)

3.3 太阳区域的识别3.3.1 确定和分割高亮光斑区域
3.3.2 鱼眼图像快速转换
鱼眼图像会造成很大的变形,因此必须将鱼眼图像转换成平面透视图像,从而提取太阳区域特征信息,再根据特征信息来确定太阳区域.本文采用基于球面模式的经度坐标校正鱼眼图像,其校正运算简单,复杂度不高,转换后的图像虽然还会存在一定程度的失真,但已可满足本系统的识别使用[14-15].
假设鱼眼镜头可近似为半球面,视角180°,鱼眼摄像头的拍摄方向OZ轴为光轴,XOY为成像平面,图3所示.对于空间场景中的一点P0,连P2交于半球面于点P1,过点P1作OZ轴的平行线,交底面圆于点P2,则点P2就是空间点P0所成鱼眼图像的像素点.画面中心部分的直线保持原来状态,经度越大的经线,它的弯曲度越大,图4中最外层白色圆形所包含的区域就是鱼眼图像有效区域.
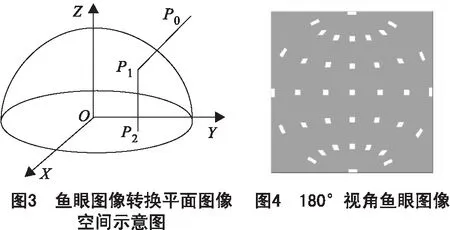
基于球面模式的经度坐标校正就是保持纵坐标不变,把图像中的像素点的横坐标还原到原先位置,从而通过坐标转换来降低鱼眼图像的畸变程度.鱼眼图像的圆形有效区域的提取,校正参数(圆心坐标和半径)直接影响校正精度,校正转换公式如下:
(6)
y-y0=V-y0⟹y=V.
(7)
其中(x0,y0)鱼眼图像的圆心坐标,R为半径.
3.3.3 太阳区域特征的提取与动态识别
将鱼眼图像投影转换到平面图像后可能会产生有多个高亮度斑区.通过建立太阳特征规则,例如轮廓形状特征、面积特征以及动态偏移特征等对多个高亮度斑区图像进行识别认定[14-15].
1) 轮廓形状特征.完整的太阳光斑在平面图像中应呈现圆形.由于采用球面模式的经度坐标校正鱼眼图像,转换后在图像边缘部分还会存在失真现象,因此长宽比不可能近似相等,该目标特征阀值参数范围取值要大一些.
Ωn=Wn/Ln∈(0.8,1.2),n=1,2,3,….
(8)
其中Wn、Ln为第n个高亮斑区的最大长度与宽度.
2) 面积特征.在鱼眼镜头参数不变的情况下,任意时刻一个完整的太阳光斑区域在图像中的像素个数基本不变(NT=400).利用真正的太阳光斑区域像素点个数会在一定范围内来区分判别是否是真的太阳光斑.将每个高亮度斑区的像素个数总数设为Nn.
Φn=Nn/NT∈(0.5,1.2),n=1,2,3,….
(9)
3) 动态偏移特征[9].依据太阳移动轨迹特点规律,在较短时间内,位置的变化量应在一定范围内(即前后两次采样的太阳重心坐标偏差).为此首先要求出当前高亮度光斑及平面重心,见式(10).
(10)

可根据当前高亮度光斑区的重心坐标(Ui,Vi)与前一时刻的太阳重心坐标(Ui-1,Vi-1)的偏差量Δi进行判断,见式(11).

(11)
若晴朗的天空,空中无多个运动目标时,鱼眼图像中的高亮度区域有且只有一个,即高亮度区域就是太阳区域;当天空中同时含有多个运动目标,如飞机或云朵等其他飞行物时,其遮挡或反光会造成太阳区域光斑受损或形成伪光斑,从而造成误判.所以只有当某个高亮度区域同时符合轮廓形状特征、面积特征以及动态偏移特征匹配识别(即同时满足式(8)、(9)、(11))时,才能确认该高亮度斑区域为太阳区域[16].
3.4 视点与太阳相对方位的定位算法
根据先验知识,当太阳光线入射角垂直时,平面图像上太阳重心坐标一定与图像篇幅的中心重合.利用该特性既可以作为计算任意时刻的高度角坐标偏差和方位角坐标偏差的依据,也可以作为入射角是否垂直的判断条件.已知本系统用的鱼眼摄像头输出640×480像素图像和当前时刻太阳重心坐标(Ui,Vi),可计算出:高度角坐标偏差值Δh=Ui-320;方位角度角坐标偏差值Δα=Vi-240.
4 实验
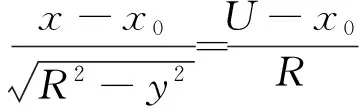
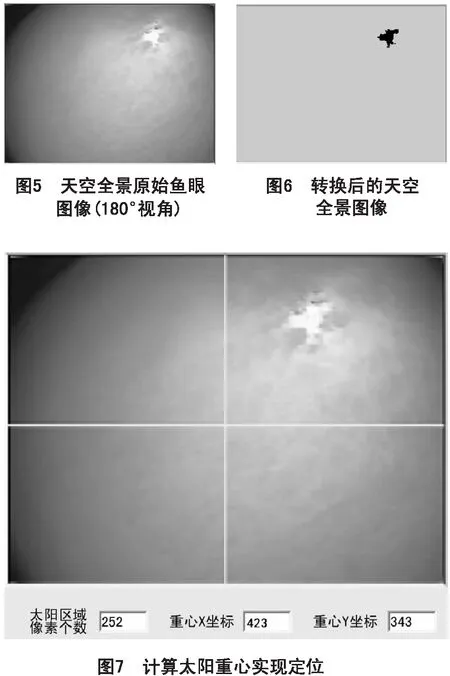
实验采用工控机IPC-8610-A10-02(配置为:Intel Pentium D 3 GHz处理器、2 GB DDR2内存、160 GB SATA硬盘,图像分辨率为 640×480像素,USB数据接口,速率25帧/s),在WINDOWS XP SP3 环境下使用 VB 语言编写跟踪算法.考虑到太阳位置在短时间内变化不大,因此每间隔15 min才对系统进行一次跟踪,图像采集频率为5帧/s即可.鱼眼图像处理,太阳区域识别及重心计算如图5~7所示(为显示需要,该图片经过反白处理,即图中黑色光斑区就是实际的太阳区域).
5 结语
采用鱼眼图像识别技术可以大视角捕捉天空全景图像,通过HIS颜色模型的处理和球面模式算法的有效转换,可以利用太阳区域特征快速识别真正的太阳光斑,有效避免由于天空多个飞行物或反光云朵所造成的误判问题,从而现实对太阳精确定位.此外可在本系统基础上增设相应的滤光技术,不仅能减少光照幅度对鱼眼镜头的影响,避免烧毁图像传感器,也能在全阴天环境中准确捕捉太阳位置,这是值得继续研究的方向.

[1] 陈维,李戬洪. 抛物柱面聚焦的几种跟踪方式的光学性能分析[J]. 太阳能学报,2003,24(4):477-482.
[2] 郑小年,黄巧燕. 太阳跟踪方法及应用[J].能源技术,2003,(24) 4: 149-151.
[3] 王雪文,王洋,阎军锋,等. 太阳能电池板自动跟踪控制系统的设计[J]. 西北大学学报:自然科学版,2004,34(2):163-164.
[4] 郑晓斌,沈培辉. 基于PLC的太阳能光伏聚光发电随动系统的研究[J]. 陕西科技大学学报:自然科学版,2012,30(5):118-122.
[5] 王永东,崔容强,徐秀琴. 固定式光伏方阵日照性能[J]. 太阳能学报,2003,24(3): 357-359.
[6] 陈维,沈辉,舒碧芬. 光伏系统跟踪效果分析[J]. 中国科学技术大学学报,2006,36 (4), 355-359.
[7] 王炳忠,汤洁.几种太阳位置计算方法的比较研究[J]. 太阳能学报,2001,22(4):413-416
[8] WANG Xi-hui,WANG Jian-ping,ZHANG Chong-wei. Research of an omniberaing sun locating method with fisheye picture based on transform domain algorithm[C]//International Conference on Intelligent Computing 2006.China :Kunming,LNCIS, 2006,345: 1163-1174.
[9] 徐晓冰,王建平,张崇巍,等. 聚光系统中太阳位置的鱼眼图像识别[J]. 计算机辅助设计与图形学学报,2008,15(3):257-261.
[10] 王建平,钱波.江滔. 基于变换域分析的车牌分割研究[J]. 合肥工业大学学报:自然科学版,2004,27(3):251- 256.
[11] CHAO R M,KO S H,PAI F S,et al. Evaluation of a photovoltaic energy mechatronics system with a built-in quadratic maximum power point tracking algorithm[J]. Solar Energy,2009,3(12):2177-2185.
[12] 贾云得,吕宏静,刘万春. 鱼眼变形立体图像恢复稠密深度图的方法[J]. 计算机学报,2000,23(12):1232-1234.
[13] GONZALEZ R C,WOODS R E,EDDINS S L. 数字图像处理[M].2版.阮秋琦,阮宇智,译. 电子工业出版社,2003.
[14] 汪嘉业,杨兴强,张彩明. 基于鱼眼镜头拍摄的图像生成漫游模型[J]. 系统仿真学报,2001,13 (增刊) : 66-68.
[15] 陈明伟,徐丹. 球面坐标定位校正鱼眼图片并合成全景图的方法[J].云南民族大学学报:自然科学版,2004,13(03):214-217.
[16] CHEGAAR M,OUENNOUGHI I,GUECHI F. Extracting DC parameters of solar cells under illumination [J]. Vaccum,2004,75 :367-372.
(责任编辑 庄红林)
Application of fish-eye image recognition technology in the solar tracking system
ZHENG Xiao-bin1,XUE Yu-qian2
(1.Department of Mechanical Engineering,Fujian Chuangzheng Communications College,Fuzhou 350007,China;2.College of Electrical Engineering and Automation,Fuzhou University,Fuzhou 350000, China)
Through the processing of the panoramic sky image of HIS color model obtained from fish-eye lens, the fast conversions of their plane with the help of the spherical model, the extraction of the features of the solar shape, the area features and dynamic displacement in its high facular brightness, this paper gives a precise positioning of the sun based on the gravity calculation of its regional center.
HIS;fish-eye image conversion;regional characteristics of the sun;solar tracking method
2014-07-15.
福建省教育厅中青年教师教育科研项目(JA13377、JB13289).
郑晓斌(1982-),男,硕士,讲师.主要研究方向:智能控制技术、可再生能源与新能源发电.
TP751.1
A
1672-8513(2015)01-0052-05