高动态GPS弱信号多级相干累加捕获
2015-06-23刘原华张旭东牛新亮
刘原华, 张旭东, 牛新亮
(1.西安邮电大学 通信与信息工程学院, 陕西 西安 710121;2.中国空间技术研究院 西安分院, 陕西 西安 710000)
高动态GPS弱信号多级相干累加捕获
刘原华1, 张旭东1, 牛新亮2
(1.西安邮电大学 通信与信息工程学院, 陕西 西安 710121;2.中国空间技术研究院 西安分院, 陕西 西安 710000)
给出一种高动态GPS弱信号捕获算法。对接收到的卫星信号,以1ms为步进做20次数据翻转位估计,确定出单次积分时间为20ms;以单次积分时间内相干损耗小于1dB为标准,确定单次积分中频率和码相位的搜索步进;在第二级累加之前对多普勒频偏和导航数据进行同时补偿,实现多级相干累加捕获。模拟一组卫星信号,利用软件接收机的设计进行仿真验证,结果显示,该方法在信号功率为-180dBW的情况下,捕获所需的累加次数是相干-非相干方法的36.4%,且动态适应能力强。
高动态;弱信号;伪码捕获;频率补偿;数据补偿
随着卫星导航系统的逐渐完善,GPS已经进入到全球化快速发展阶段,飞行器的飞行距离越来越远,速度越来越快,速度的变化率也越来越大,例如[1],火箭的加速度约为7~8倍的重力加速度,弹载GPS接收机的速度为7.61 km/s,加速度为89 km/s2。由于高速运动引起的多普勒频移使得常规接收机难以捕获到卫星信号。高动态引起的频率的偏移和码相位的走动,给信号的捕获结果带来了严重的影响,所以对动态引起的多普勒频率偏移进适时补偿很有必要。
随着飞行环境变得的越来越复杂,接收机所接收信号的能量越来越弱,实现弱信号的捕获也是一个备受关注的问题。针对弱信号经常采样相干-非相干法进行码捕获,但在非相干捕获时存在平方损耗[2],这使得捕获性能明显下降[3],所以要提高弱信号的捕获性能就必须增加相干累加的次数[4]。
改进的两级相干累加码捕获方法[5]可克服平方损耗,但却忽略了动态引起的频偏。频率补偿与相干-非相干结合的方法[6]实现了频率偏移补偿,但却没有考虑非相干引起的平方损耗。
本文拟给出一种多级相干捕获方法,通过计算单次积分的相干损耗,确定频率和码相位搜索步进,在第一级捕获前提下,通过谱循环移位作频率补偿,同时对数据位翻转进行补偿,以消除多普勒的不确定和数据位翻转性带来的影响,从而做到多级相干累加,克服平方损耗,实现卫星信号的捕获。
1 相干-非相干捕获
对接收到的高动态GPS弱信号,针对高动态引起的多普勒频移问题,首先必须分析单次积分后频率的偏移程度和引起的相干损耗的大小;对于弱信号,必须确定非相干引起的平方损耗的大小和数据比特的翻转问题。
1.1 相干-非相干累加平方损耗
对弱信号常用的捕获方法是在相干累加的基础上,为了进一步提高信噪比,采用相干-非相干累加方法进行捕获。
采用Nf次非相干累加相对于单次非相干累加的信号增益为
Gf=10 log10(Nf)-Lf,
其中Lf是由于非相干累加中的平方操作引起的平方损耗,一般表示为[7]
而ρc为相干累加信噪比即输入非相干累加的信噪比,RSN输出非相干累加信噪比,K是非相干累加次数。非相干累加前的信噪比与非相干引起的平方损耗的变化曲线如图1所示。
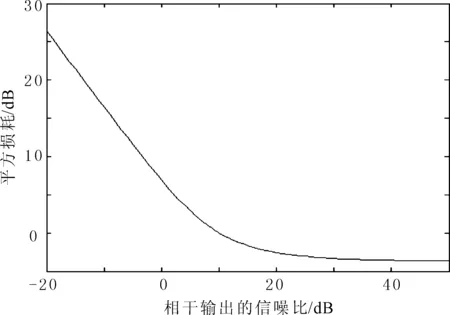
图1 相干输出信噪比与平方损耗的关系
随着非相干输入即相干输出信噪比的增加,平方损耗逐渐降低,所以在进行非相干累加之前要尽可能的增加相干累加时间,从而降低由非相干引起的平方损耗,并最终提高非相干累加的信噪比。相干累加后信噪比小于10 dB时,相干累加优势更大,所以在捕获弱信号时要尽可能的增大相干累加的时间,以此提高捕获灵敏度。
1.2 动态引起的多普勒频移
由于动态的影响,每个单次相干积分的结果在二维搜索空间都产生了不同大小走动,如图2所示。
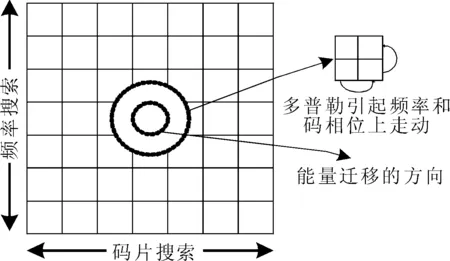
图2 动态引起的多普勒频移走动
对于每个单次积分结果,如果不对结果进行任何处理直接进行累加,则由于频移的影响可能使得能量最大值在不同频率搜索点进行叠加,进而造成能量损耗。因此对于单次积分结果必须进行频率补偿后再进行累加。
1.3 导航数据比特翻转
在捕获二维搜索中,如果所使用的数据包含了导航电文的符号翻转,则在相干累加中正负抵消,从而使得捕获结果大大衰减。
数据翻转对捕获性能的影响如图3所示。在20 ms内出现导航数据翻转明显对捕获结果产生很大衰减,所以要想做长时间的捕获就必须对数据比特翻转进行补偿。
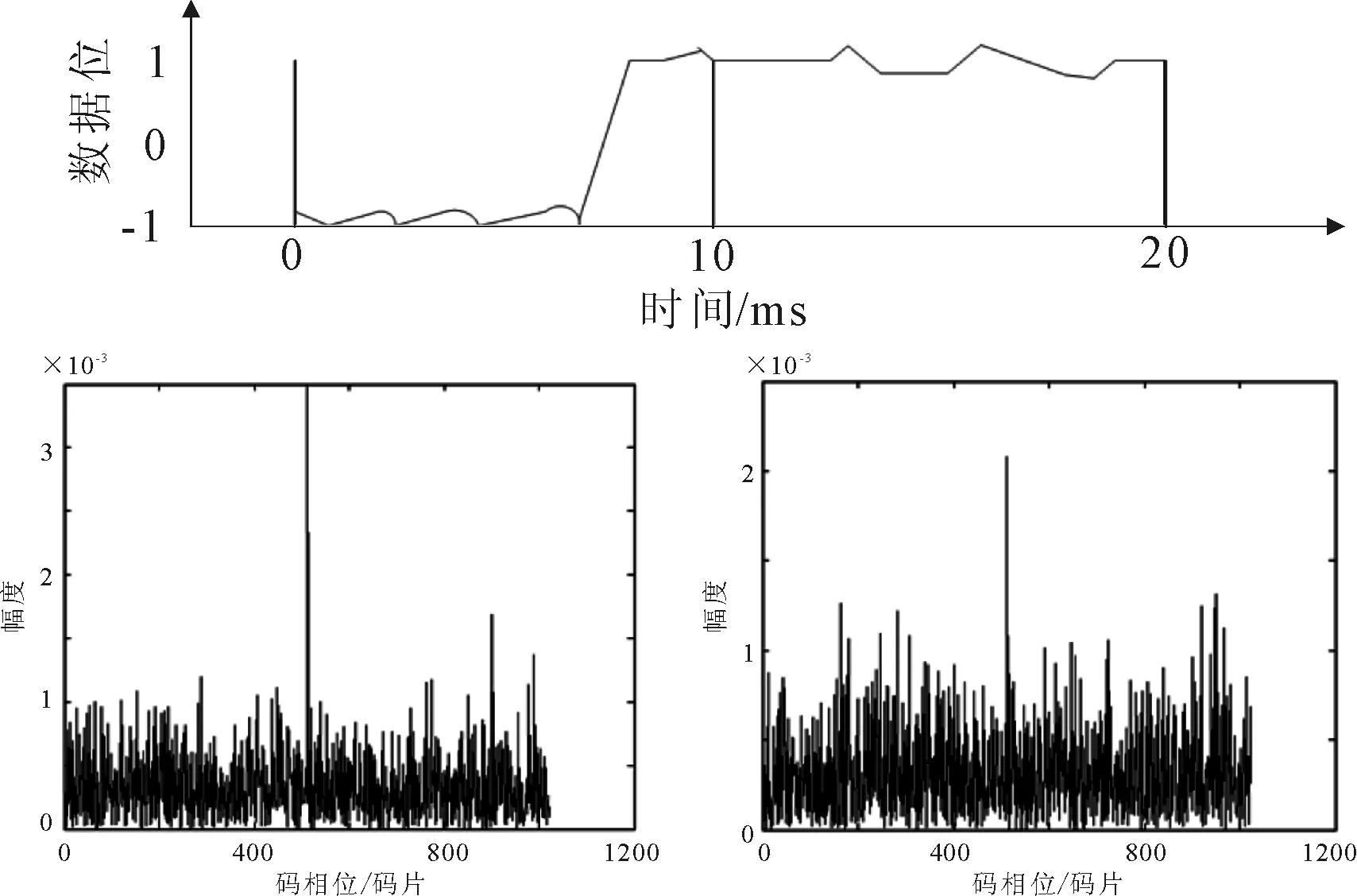
图3 有无数据翻转捕获对比
2 确定单次相干积分
对于高动态弱信号条件下GPS信号的捕获,首先必须以单次积分时间内相干损耗小于1 dB为标准,确定单次积分中频率和码相位的搜索步进。
2.1 多普勒频率变化率引起的相干损耗
在卫星信号进行捕获时,高动态会引起多普勒频移和信号能量的损耗。动态越大则引起的能量损耗越大,且在长时间的相干累加中由于多普勒变化率引起的能量损耗不可忽略[8]。设相干积分为20 ms,且伪码码片已经对齐,码速率为102.3 Mchip/s时,高动态多普勒频率变化对相干输出的影响如图4所示。
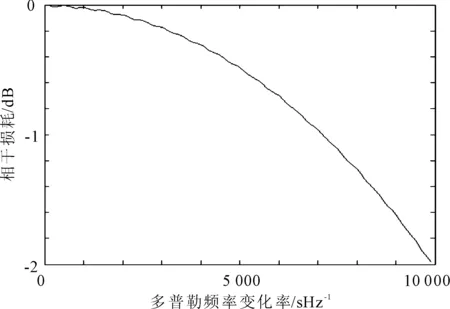
图4 多普勒频率变化引起的相干损耗
动态频偏引起的损耗不可避免,且瞬间的加速度还会造成更大的能量损失和多普勒频率偏差,进而影响相干累加结果,所以在接收到高动态的信号时,需要考虑由动态引起的相干损耗,及高动态引起的多普勒频率偏移。
2.2 多普勒频率偏移引起的相干损耗
频率的偏移对捕获结果影响很大,所以必须确定合适的搜索步进,进而减少相干损耗。设相干积分为20 ms,码速率为102.3 Mchip/s时,由多普勒频率偏移引起的相干损耗变化如图5所示。
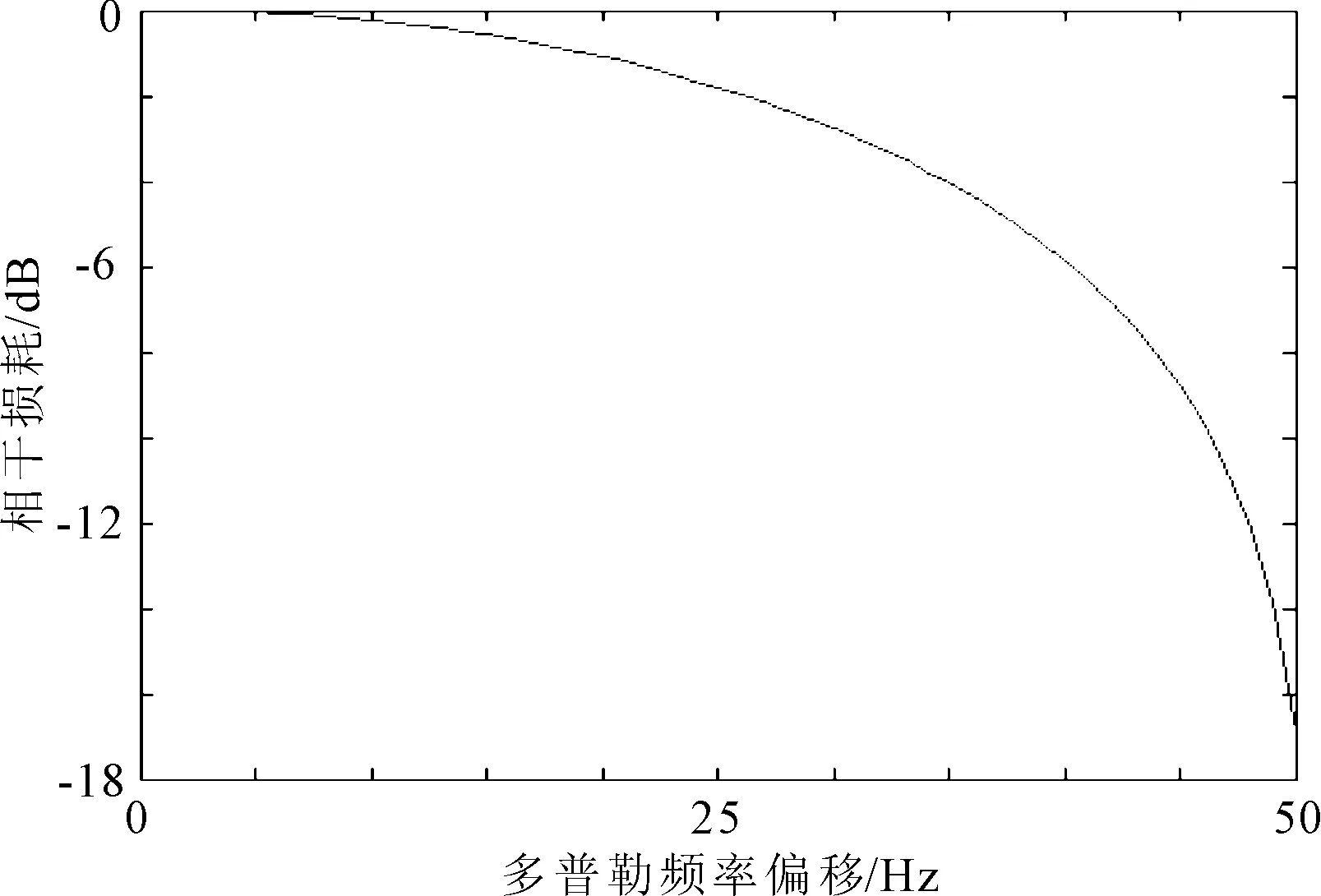
图5 多普勒频移对相干结果的影响
相干增益的损失值随着频率偏差的增大而不断增大,且偏差越大损耗越大。对于20 ms当频率偏移超过20 Hz时相干损耗大于1 dB。所以在单次捕获设计中,频率的搜索步进控制在20 Hz之内才能保证由于频偏引起的损耗小于1 dB。
2.3 码元偏差引起的相干损耗
设相干积分为20 ms,码速率为102.3 Mchip/s时,由于码相位偏移引起的相干损耗变化如图6所示。
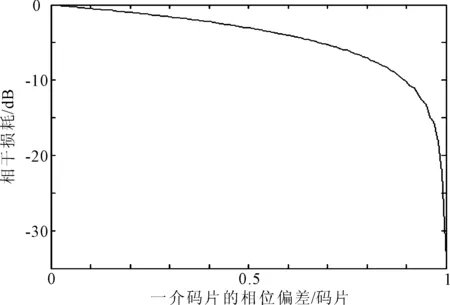
图6 码元偏差造成的相干损耗
随着码元偏差的增大相干损耗也越来越大,在半个码片之内相干损耗较小,大于半个码片相干损耗急剧增大,此时严重影响捕获性能,所以在不考虑码相位走动的情况下,可尽量增大搜索步进,要是考虑高动态且捕获时间很长时,则要考虑动态引起码相位走动所导致的相干损耗。码元搜索步进尽可能小,例如,码相位偏差10%时,引起的相干损耗为0.463 dB,偏差20%时,引起的相干损耗为0.958 dB。所以要想使码相位引起的相干损耗控制在1 dB之内,码相位步进尽量控制在码元的20%以内。
2.4 导航数据比特翻转引起的相干损耗
当接收到下变频的信号后,一般的方法是直接对信号进行捕获处理,这种方法使得相干累加的时间只能局限在10 ms以内[9]。要想最大化的增加相干累加,可以在相干累加之前对数据位反转的位置进行估计。若20 ms中以1 ms的数据长度作为一个数据位反转的估计长度,则数据翻转引起的损耗为
Im=10 log10(1-0.1)=0.46 dB。
2.5 单次相干积分的总体设计
设单次积分时间为20 ms,要想使得单次积分引起的最大损耗控制在1 dB以内。则由图4可知20 ms中动态多普勒频移引起的损耗为0.004 7 dB,由图5可知多普勒频偏为频带宽度的20%时引起的相干损耗为0.289 4 dB,由图6可知码相位偏差5%时,引起的相干损耗为0.239 dB。所以20 ms相干积分后由相干累加引起的损耗
Ls≤0.071 6+0.239+0.139+0.46≈0.91 dB。
3 多级相干累加算法
对于接收到的高动态GPS弱信号,要想增加相干累加次数首先必须对数据位的位置作初步的估计,然后在此基础上确定合适的单次积分。在单次积分之后进行频率偏移补偿和数据补偿,然后进行多级相干累加,以此提高捕获效率。
3.1 数据翻转位置的估计
数据的传输速率为50 Hz/s,则每20 ms可能有一个数据位翻转。若以1 ms的数据长度作为一个数据位反转的估计长度,则对接收到的信号以1 ms为步进时移20次。则在这20组估计结果中必然有一组使得数据的翻转位在第一毫秒中,该组中的后19 ms数据位符号完全相同,不考虑数据翻转的情况下此时最大可进行20 ms的相干累加。
如图7所示,每个20 ms中当数据位翻转越靠近A端则引起的损耗越少,当数据位翻转越靠近B端则引起的损耗越大。
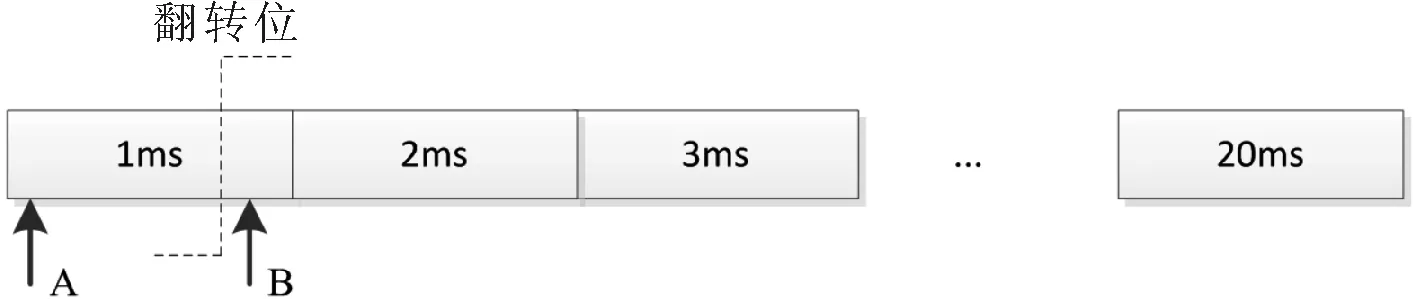
图7 数据翻转位估计
3.2 确定单次相干积分
在确定好数据位大概位置之后,就必须确定合适的单次积分时间,码的搜索步进,频率的搜索步进。
由于事先对数据位进行了估计,所以相干积分时间最大可以设为20 ms。对于码搜索步进和频率搜索步进的确定,需要考虑频率偏差,码相位偏差和动态频偏三者引起的损耗之和小于1 dB。设大动态引起频率变化为500 Hz/s,单次积分为20 ms。20 ms内最大可引起10 Hz频偏,单次积分后对其进行频率补偿,再与下次积分结果进行相干累加。为了有效地消除动态多普勒的影响,在单次积分损耗小于1 dB时,将频率的搜索步进设为10 Hz,由于码速率为102.3 Mchip/s,码片搜索以0.1个码片即10个采样点进行搜索。
3.3 多普勒频率补偿和数据补偿
由于动态的影响,每个单次相干积分的结果在二维搜索空间都产生了不同大小走动,要想将单次结果进行二次累加就必须对频率进行补偿。从第二个单次积分结果开始,按照多普勒频率搜素步进循环移位搜索,补偿后再进行相干累加。
在经过单次积分后的捕获结果可表示为
其中fd是由多普勒频移和动态多普勒变化引起的总的多普勒频移。n是相干累加的次数,总共累加次数为N,r[n]为n次相干累加的相干值,c[n]表示相干损耗,η表示高斯噪声。
由于动态的影响,每次捕获结果中fd的搜索都可能落在不同频率仓上,这样单次积分后就不能直接进行相干累加,所以必须对多普勒频移进行整体补偿才能进行多级相干累加。
在频率偏移补偿的同时导航电文极性的变化必须考虑,导航电文的取值可为-1或+1。对于每组K个数据块的信号,若相干累加的起始点刚好对应导航电文数据极性的跳变边缘时,则刚好对应2K个数据位组合[10]。经过补偿后再进行相干累加,直到捕获到信号为止。
3.4 整体设计方案
整体设计如图8所示。
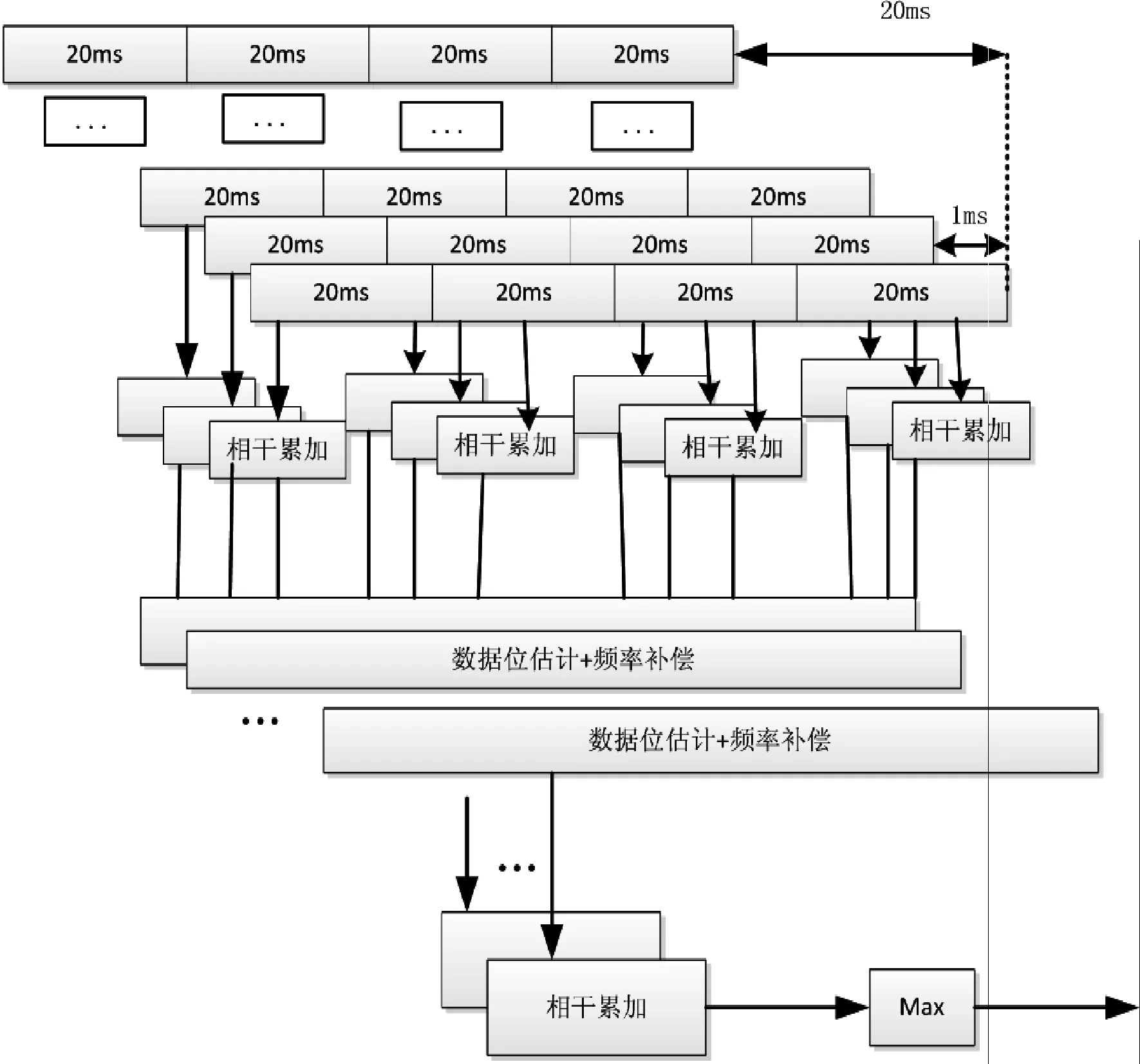
图8 数据补偿加频率补偿的实现
考虑了导航数据组合后,每组数据的相干累加结果最终可表示为
其中Y(n)表示第n个单次积分的结果,Dn表示每组数据块对应的导航数据位,Dn的值为+1或者-1。最终捕获结果Y=max(Pn)。将Y与判决门限进行对比,当Y的值大于判决门限时,则认为捕获成功。且此时导航数据位的边缘就在相干累加的起始点处。
在频域上搜索M次,码相位上搜索L次,数据补偿K次,对整体补偿后进行捕获,则总共所需要的搜索次数为
X=(M×L)K×2K×20(次)。
3.5 算法分析
设输入信号功率S=-180 dBW,噪声功率谱密度N0=-201 dBW/Hz。则20 ms单次积分后的噪声功率N=-184 dBW,理想信噪比为4 dB。考虑到相干损耗则信噪比
SNR≤4-0.911=3.089(dB)。
若设最终信噪比为13.6 dB时可捕获信号,则需要增加10.511 dB。需要相干累加次数
NX=101.051 1=11.25(次),
共计225 ms。
对于非相干累加则需要考虑平方损耗,由图6可知若输入信噪比为3.089 dB时则引起的平方损耗4.387 dB,所以对于非相干累加则需要增加
10.511+4.387=14.901(dB),
由非相干累加增益公式可求得非相干累加次数为30.9次,即需要618 ms。
以上分析说明,相同条件多级相干累加法所需的时间,在理论上只是相干-非相干法的36.4%,捕获时间有明显减少。
4 仿真验证
为了说明频偏补偿和数据补偿后多级相干累加对高动态弱信号捕获的有效性,利用计算机进行仿真验证。
设单次积分为20 ms,频率的搜索步进设为10 Hz,由于码速率为102.3 Mchip/s,码片搜索以0.1个码片即10个采样点进行搜索。 20 ms的单次积分时间则带宽为50 Hz,频域搜索范围设为-300~300 Hz,则M=61,由于码速率为102.3 Mchip/s,10个采样点进行搜素,则L=10 230,NX=11.25,由于单次积分20 ms所以需要12次相干积分即积分时间为 240 ms。相干累加结果如图9的所示。
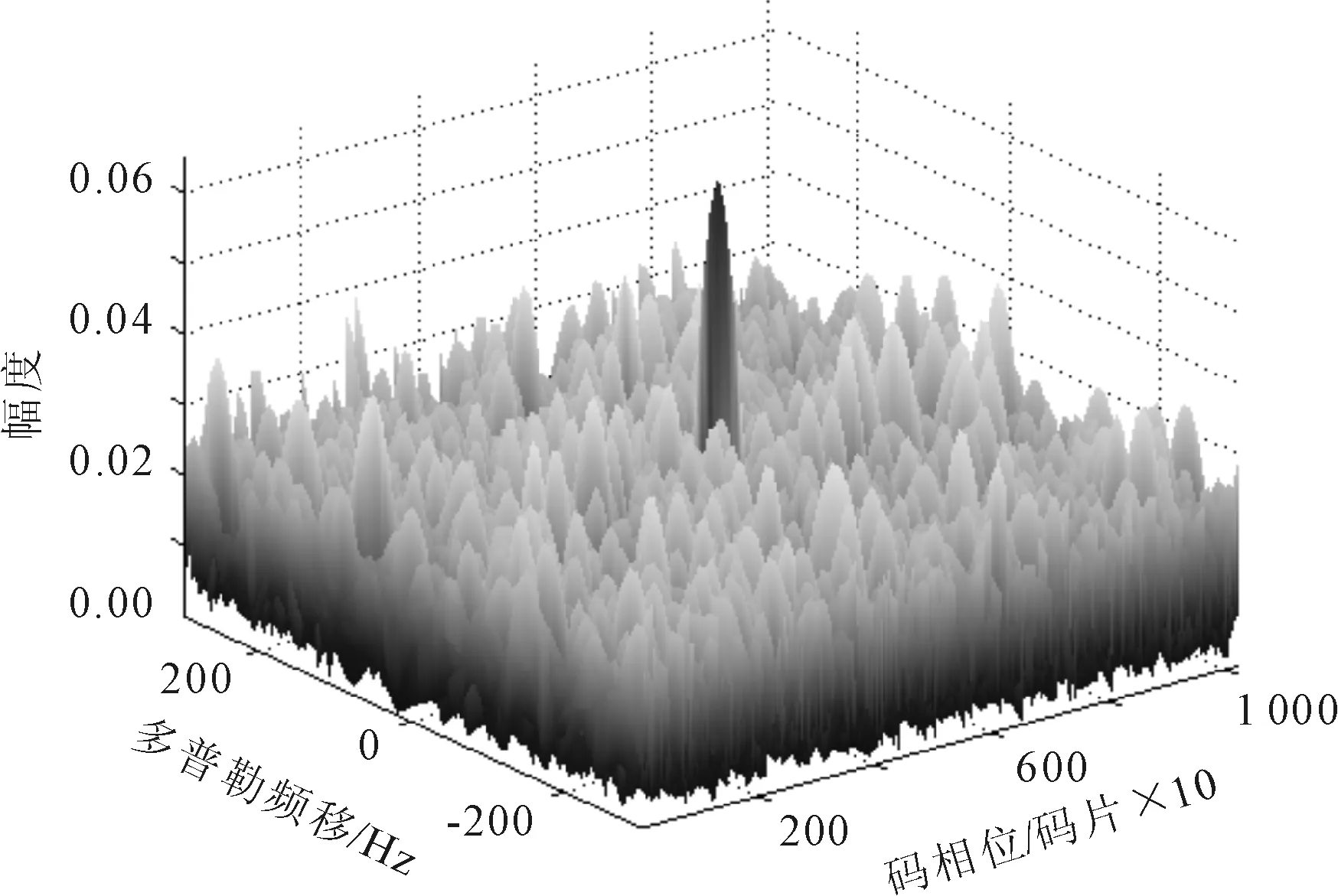
图9 多级相干捕获结果
对于相干-非相干累加法,经过31次,即620 ms的非相干累加结果如图10所示。
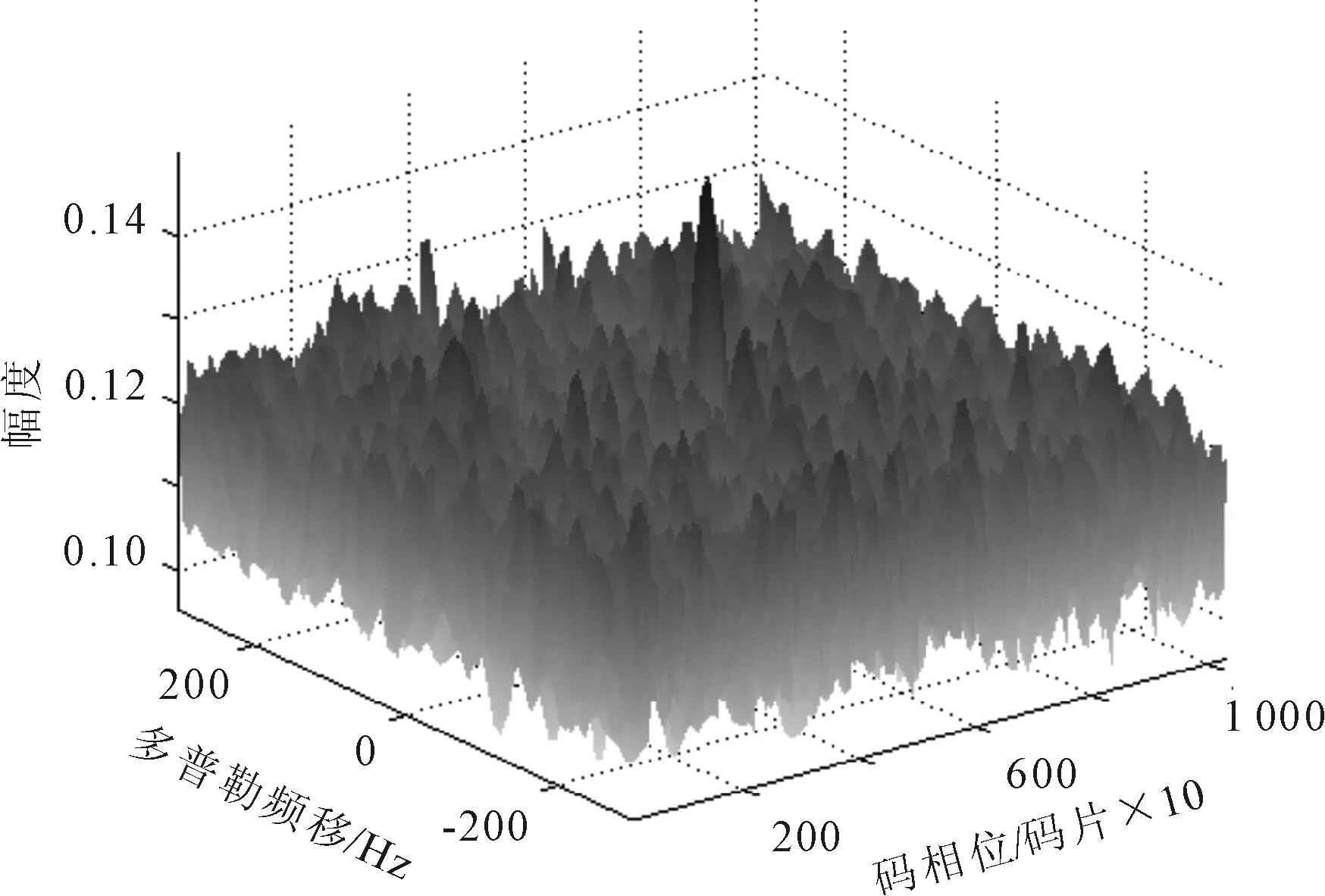
图10 经过非相干累加后的结果
经多普勒频率和数据补偿,只需12次,相干累加信号即可被成功捕获。对于相干-非相干,需经620 ms,非相干累加信号才能被捕获。非相干累加在平方操作时会放大噪声,捕获效果相对较差。
仿真对比实验结果显示,经过补偿后的捕获方法速度最快,捕获效率得到较大提高。所需捕获时间是非相干累加的38.71%。
5 结语
高动态多普勒频率下,对弱卫星信号进行长时间积累时,需要同时完成码相位和多普勒频率的搜索,并兼顾对导航数据的补偿。多级相干捕获算法在单次捕获完成之后对频率和导航数据同时进行补偿,可消除频偏和数据翻转的影响,通过多级相干累加,克服平方损耗,提高捕获灵敏度。仿真结果显示,新方法速度快,是相干-非相干方法的2.75倍,具有较高捕获灵敏度。
[1] 易维勇,董绪荣,孟凡玉,等.GNSS 单频软件接收机应用于编程[M].北京:国防工业出版社,2010:10-54.
[2] 范春磊,朱勤.基于接收机特性曲线的非相干积分平方损耗计算方法[J]. 电讯技术,2012,52(7):1169-1173.
[3] Tsui J B-Y.Fundamentals of Global Positioning System Receivers: A Software Approach (second edition)[M].New Jersey: John Wiley & Sons,2005:247-255.
[4] Pratap M, Per E. Global Positioning System: Signals, Measurements, and Performance(Second Edition)[M]. Beijing: Publishing House of Electronics Industry, 2008.22 -168.
[5] 邓强. 一种改进的两级相干累加码捕获方法[J].电讯技术,2012,52(5):704-708.
[6] 张明林,李国通,朱秋芳.多普勒频率补偿算法在GPS信号捕获中的应用[J]. 计算机仿真,2009,26(10):69-72.
[7] Zhong Jie,Shen Yingjie,Zhao Minjian,et al. Design of acquisition algorithm based on delay-finding detector for indoor GNSS signals[J].Journal of Harbin Institute of Technology(New Series).2012,19(5):7-16.
[8] 彭耿,黄知涛,李强,等.中低轨卫星信号的多普勒频移估计与补偿[J].系统工程与电子技术,2009,31(20):256-260.
[9] 张文,饶谷音,韩送来,等.不同相干积分方法对GPS弱信号捕获的影响[J].数据采集与处理,2012,27(1):38-44.
[10]姜冰心,张中兆,孟维晓. 弱信号下软件GPS接收机全比特捕获算法[J].电子技术应用,2008(9):99-102.
[责任编辑:瑞金]
A multilevel coherent accumulation GPS weak signal acquisition method in high dynamic situation
LIU Yuanhua1, ZHANG Xudong1, NIU Xinliang2
(1.School of Communication and Information Engineering, Xi’an University of Posts and Telecommunications, Xi’an 710121, China;2. Xi’an Branch of China Academy of Space Technology, Xi’an 710000, China)
An acquisition approach is proposed for high dynamic and weak GPS signal. For the
satellite signals,the data inversion bit estimate is conducted 20 times in steps of 1 ms,and the single integration time is determined as 20 ms. Loss is less than 1 dB within a single coherent integration time is determined by the standard that the integration in a single frequency and code phase search step. The accumulation of Doppler shift and navigation data is simultaneously compensated before the second stage in order to achieve multi-level coherent accumulation capture. A simulation is conducted by using the design of software receiver and by simulating a set of satellite signal. The results indicate that, in the condition of -180 dBW signal power, the cumulative number by this approach is 36.4% that of by the coherent-noncoherent acquisition method and this approach also has better dynamic adaptability.
high dynamic, weak signal, pseudo-code acquisition, frequency compensation, data compensation
2015-03-31
国家自然科学基金资助项目(61201194)
刘原华(1983-),女,博士,副教授,从事信道编码和通信调制研究。E-mail:yuanhliu@163.com张旭东(1989-), 男,硕士研究生,研究方向为移动通信及应用。E-mail:zhxud803@126.com
10.13682/j.issn.2095-6533.2015.05.002
TN
A
2095-6533(2015)05-0011-06