基于双相机的目标距离测量技术*
2015-06-23孙少杰杨晓东雷铭哲任继昌
孙少杰,杨晓东,雷铭哲,任继昌
(1.海军潜艇学院,山东 青岛 266042;2.北方自动控制技术研究所,太原 03006)
基于双相机的目标距离测量技术*
孙少杰1,杨晓东1,雷铭哲2,任继昌1
(1.海军潜艇学院,山东 青岛 266042;2.北方自动控制技术研究所,太原 03006)
对双目视觉测量方法进行了研究和分析,采用张正友平面法对相机进行内外参数标定,根据标定所得参数对立体图像对进行校正和匹配,测距实验结果表明,在目标距离为112 m的静态条件下,该方法测量误差在5%以内,能满足一定场合的非接触测量需求。最后对影响双目测量精度的主要因素进行了分析,指出了进一步优化和提高双目系统测距精度的方向。
双目视觉,标定,图像匹配和校正,测距精度
0 引言
视觉测量技术是建立在计算机视觉研究基础上的一门新兴技术,研究重点是物体的几何尺寸及物体在空间的位置、姿态等的测量[1-2]。视觉测量按所用视觉传感器数量可以分为单目视觉测量、双目(立体)视觉测量和多目视觉测量等。单目视觉测量利用一台相机拍摄像片来进行测量工作,该方法的优点是结构简单、相机标定也简单[3-4]。立体视觉测距仿照人类双目感知距离的原理,采用两个或多个相机对同一景物从不同位置成像获得立体像对,通过各种算法匹配相应像点进而计算视差,然后根据三角测量原理最终求得目标距离。综合考虑测量精度以及结构复杂性等因素,本文选用双目结构实现距离测量。
1 测量原理
1.1 针孔模型
本文选取摄像机模型中常用的针孔模型[5],分别建立三维世界坐标系(OwXwYwZw),摄像机坐标系(OcXcYcZc)及图像平面坐标系(O1xy)如下页图1所示。
其中摄像机坐标系原点Oc为摄像机光心,Zc轴与光轴重合且与图像平面垂直,OcO1为摄像机焦距f。图像坐标系原点O1为光轴与图像平面的交点,x、y轴分别平行于摄像机坐标系Xc、Yc轴。存储在计算机中数字图像的坐标系可用两种方法表示,一种以像素为单位,坐标系原点O位于图像左下角;另一种以物理单位(如mm)表示,原点位于O1,x、y轴分别与u、v轴平行。
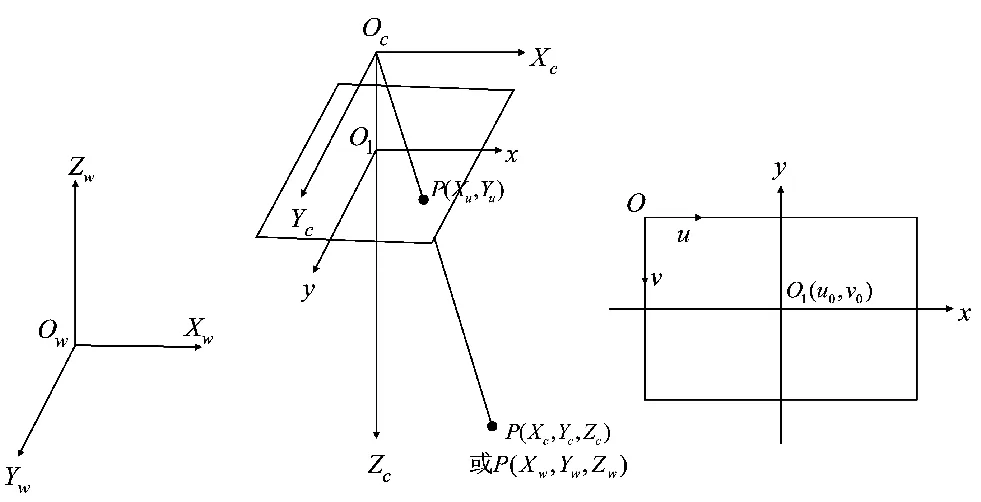
图1 针孔模型各坐标系示意图
根据上述模型,可得空间任意点P由世界坐标系到图像像素坐标系的转换关系,写成齐次方程形式为
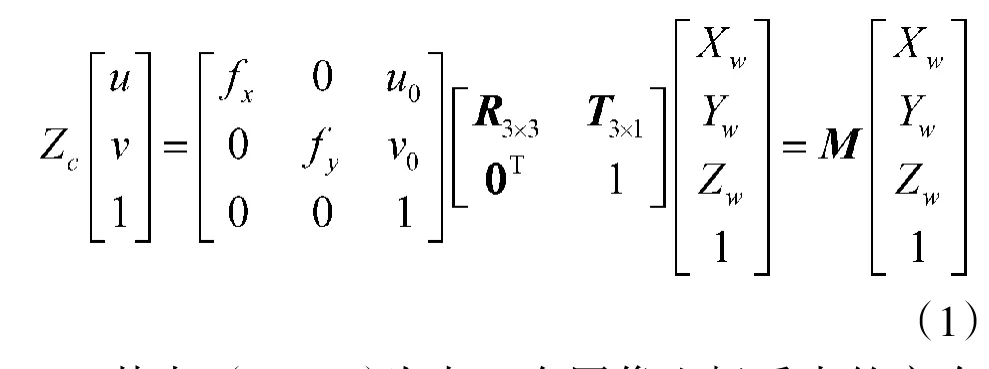
其中,(u,v,1)为点P在图像坐标系中的齐次坐标,(OwXwYwZw)为点P在世界坐标系中的坐标,R、T为用来描述摄像机坐标系到世界坐标系的旋转矩阵和平移向量,fx=f/dx和fy=f/dy(dx、dy为单个像素的物理尺寸)分别为u、v轴上的归一化焦距。
1.2 相机参数标定
相机参数分为内参数和外参数,其中内参数包括相机焦距、主点位置及畸变系数,外参数包括相机位置和姿态。相机参数标定方法很多[6],本文采用计算机视觉领域较为常用的张正友平面标定法[7],相机内参数分别为焦距(fx,fy)、主点位置(u0,v0)、径向畸变(k1,k2)和切向畸变(p1,p2)。制作9×13的边长为30 mm的平面棋盘格标定板进行标定,从不同位置和角度拍摄16幅图像,其中左相机采集的标定图片如图2所示。标定得到左右相机内参数值如表1所示。右相机相对左相机的位置可用旋转矩阵R和平移向量T表示,如表2所示。

图2 标定图片

表1 左右相机内参数

表2 右相机相对左相机外参数
1.3 图像匹配和校正
图像匹配[4]指的是在给定图像上已知点(源匹配点)后在另一幅图像上寻找与之相对应的目标匹配点(同名像点),这是双目视觉中关键的一步,匹配精度会对后续操作带来直接影响。为实现左右图像特征点快速、准确地匹配,本文将特征匹配与区域匹配方法相融合,以提取的特征点为中心选取固定大小邻域作为子窗口,考虑噪声影响,定义某特征点邻域上的灰度相关值C(x,y)来表示灰度相似性,采用最大互相关准则作为约束进行匹配。具体操作方法是:将左图像中已检测出的角点q(x,y)为中心的m×n灰度邻域作为样本窗口,以互相关函数值作为搜索的相似性测度,在右图像中搜索具有同样灰度值分布的对应区域,以实现同名点的匹配。互相关函数C(x,y)表示如下:
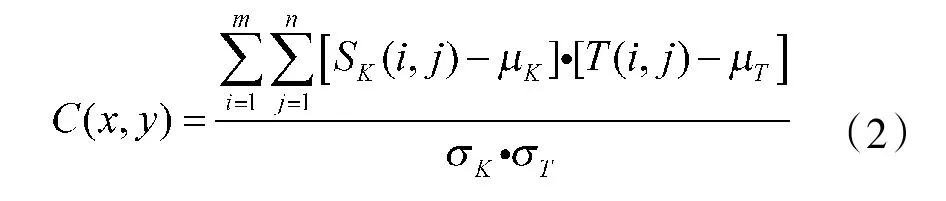
其中,SK(i,j)表示左图像样本窗口第i行j列图像点的灰度值,T(i,j)表示右图像待匹配窗口第i行 j列图像点的灰度值,,,当C(x,y)取最大时对应的右图像中点p(x,y)即为q(x,y)最佳匹配点。
图像校正的目的是使左右图实现行对准,这样可以大大减少匹配的计算量,节省匹配时间。根据Bouguet算法[9],采用前文标定所得相机参数对实地拍摄的图像对进行校正,校正前后效果对比如图3所示,可以清晰看到,与校正前相比,校正后的左右图比较精确地实现了行对准,对应匹配点大致处于同一水平线上,这样可避免在全图区域搜索对应匹配点,从而大为加快匹配速度。
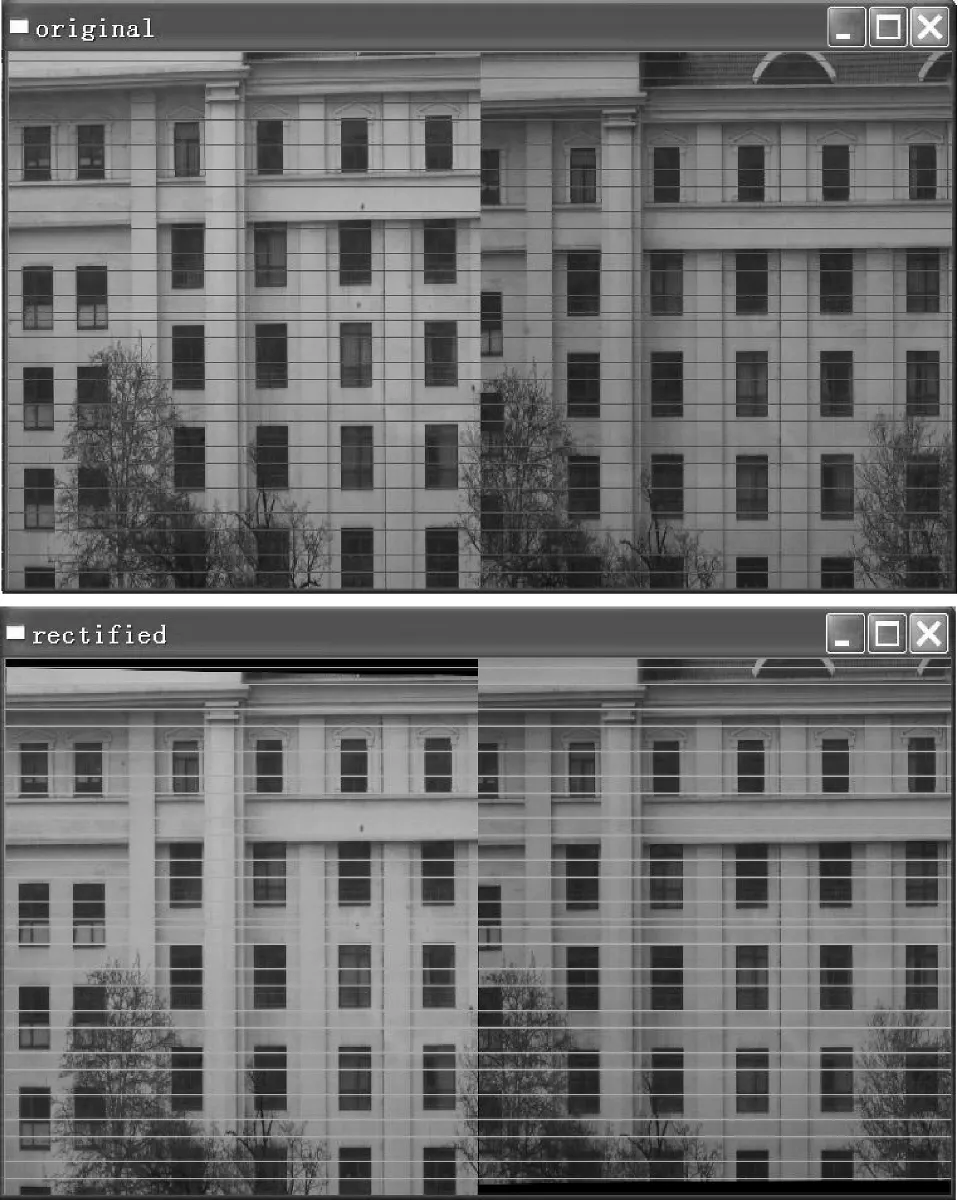
图3 左右视图校正前后对比效果
1.4 双相机测距原理
假设空间有一参考点P,P在两个已标定相机Cl和Cr上的像点分别为pl和pr,它们的投影矩阵分别为M1和M2根据透视投影矩阵变换关系[5]可知
其中(ui,vi,1),i=1,2分别为点pl和pr在各自图像坐标系中的齐次坐标,(Xcl,Ycl,Zcl,1)为点P在相机Cl坐标系下的齐次坐标,mij和mij'分别为M1和M2的第i行第j列元素。在实际应用中,由于数据不可避免存在噪声,故可用最小二乘法最终求得坐标值如下[8]:
其中,
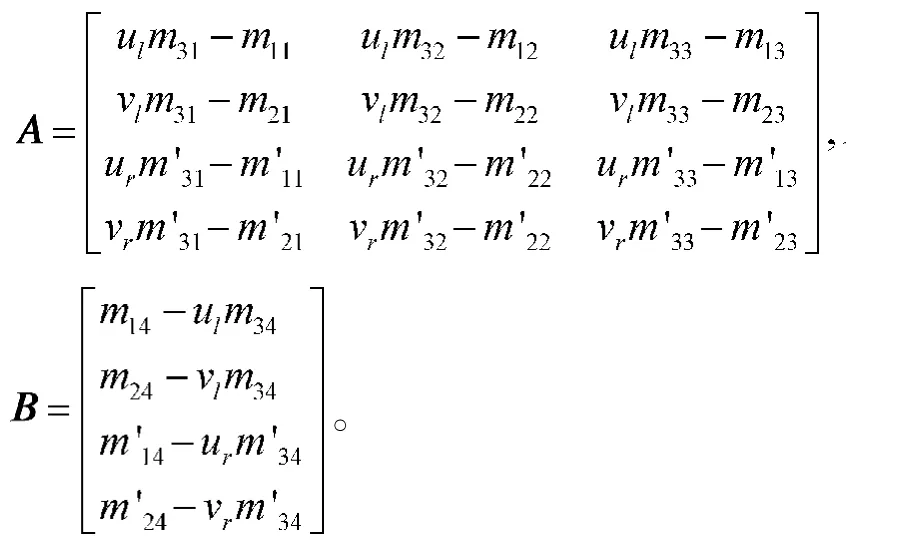
该方程反映了被测空间点坐标和被测点在两相机上像点坐标的变换关系。通过该方程即可从已知的像点坐标得出被测点的空间坐标,从而实现距离测量。
2 实验与结果分析
为验证双目系统测距精度,本文进行了实地测量实验。实验采用分辨率为1 360×1 024的CCD相机,像元尺寸为6.45μm×6.45μm,左右相机基距约30 cm,相机最大焦距为35 mm。以VC++为开发平台,结合强大的开源计算机视觉库OpenCV[9-10]对图像校正和匹配算法进行程序实现。对采集的前方建筑物图像选取多个标志点(本文选取窗户角点)进行多次测量,下页表3为其中的10次距离测量结果。
采用测量精度为1 m的手持激光测距仪测得目标建筑距离为112 m,从实验结果看,由于角点分布的特性,测量误差分布呈非均匀变化,与实际情况相符。此外,每次测距响应时间小于0.5 s。实验的最终结果表明,本文双目立体视觉系统测距误差最大不超过5%,可以初步完成对物体的快速、非接触测量。
进一步分析实验过程存在误差的主要原因,得出以下结论:一是相机的内外参数标定存在一定的误差,左右图像没有实现严格的平行对准,导致图像校正后角点匹配得到的视差值与实际值不一致,这对于远距离目标的测量尤为关键;二是由于相机拍摄目标图像质量受光照变化因素影响,在计算图像标志点最佳像素坐标时会带来干扰引起误差;此外,双目系统由于镜头质量、装配工艺以及安装结构等因素影响,存在自身固有的系统误差,使用更先进精度更高的相机可以减少此项误差。

表3 距离测量实验数据
3 结论
以往视觉测距大多在实验室或近距离条件下进行,本文基于双目立体视觉技术实现了较远距离目标的非接触式测量,拓展了双目视觉的测量范围。测距实验证明,采用双相机测距具有实现简单、实时性好、测量精度较高等优点,可视化测量结果便于分析处理,可满足一定场合的实际应用需求。
[1]迟键男,王先梅.视觉测量技术[M].北京:机械工业出版社,2011.
[2]程方,张曦,张金松.基于机器视觉的点胶机定位系统[J].机械设计与制造,2013(3):101-104.
[3]黄桂平,李广云.单目视觉测量技术研究[J].计量学报,2004,25(4):314-317.
[4]高文,陈熙霖.计算机视觉—算法与系统原理[M].北京:清华大学出版社,1998.
[5]Ma S D,Zhang Z Y.Computer Vision-Theory and Algorithm[M].Beijing:Science Press,1988.
[6]蔡健荣,赵杰文.双目立体视觉系统摄像机标定[J].江苏大学学报,2006,27(3):6-9.
[7]Zhang Z Y.A Flexible Camera Calibration by Viewing a Plane from Unknown Orientions[M].ICCV99,1999.
[8]张淑琴.空间交会对接测量技术及工程应用[M].北京:中国宇航出版社,2005.
[9]Bradski G,Kaehler A.Learning OpenCV:Computer Vision with the OpenCV Library[M].Beijing:Tsinghua University Press,2009.
[10]陈胜勇,刘盛.基于OpenCV的计算机视觉技术实现[M].北京:科学出版社,2008.
Research of Range Measurement Technique Based on Binocular Vision
SUN Shao-jie1,YANG Xiao-dong1,LEI Ming-zhe2,Ren Ji-chang1
(1.Navy Submarine Academy,Qingdao 266042,China;
2.North Automatic Control Technology Institute,Taiyuan 030006,China)
Binocular vision measuring methods are demonstrated,ZHANG’s camera calibration method is used to acquire both intrinsic and extrinsic parameters of cameras,followed by the rectification and matching of stereo images.The experiment results show that the ranging error is below 5%for a static target at 112 m,which could meet the need of some non-contact measurement occasions.Finally,factors that undermine the measuring precision are analyzed,and the heading of precision optimization as well as improving is indicated.
binocular vision,calibration,image matching and rectification,ranging precision
TN97
A
1002-0640(2015)06-0155-04
2014-04-05
2014-05-17
海军“十二五”装备预研基金资助项目
胡 磊(1985- ),男,江苏宿迁人,博士生。研究方向:导弹预警卫星系统体系结构建模与效能评估。
