“方寸”壁面移动平台
2015-06-16郝彧杨云涛张宝文
郝彧 杨云涛 张宝文
摘 要:“方寸”爬壁机器人是操控人员可以远程控制的、可在垂直壁面上平稳吸附、灵活行进且搭载特种设备进行相关作业的壁面移动平台。设备的机身为方形设计,体积小巧,结构精妙,功能强大,因此,将其命名为“方寸”壁面移动机器人。机器人的主体结构包括真空吸附系统、直线行进系统、定点转向系统和设备负载系统等4大部分,它是融合了机器人技术、机械结构、运动机构、电子电路和程序控制等技术于一身的吸盘式壁面作业平台。因为“方寸”机器人具有爬壁优势和转向灵活的特点,再加上搭载相应的功能设备,所以,它可以实现壁面清洁和探测摄影等传统民用功能,同时,它还适用于高层传送搜救、设备探伤修复等消防、化工领域的危险作业。另外,在侦查和毁伤等军用领域中,它也将会大显身手。
关键词:壁面攀爬;真空吸附;机电控制;数字建模
中图分类号:TP242.6 文献标识码:A DOI:10.15913/j.cnki.kjycx.2015.11.003
1 项目研究背景
随着经济和科学技术的迅猛发展,社会各界对军事侦查、工程探测和消防救援等方面的要求越来越提高,导致各种特殊工况下的高难、高危工作急剧增加,比如,清洗高楼外壁面、检测和维护石化企业中的储料罐外壁、对大面积的钢板进行喷漆、在高楼事故中抢险救灾等工作。与越来越高的工作需求相对应的是传统的人工壁面作业方式,但是,这种工作方式危险性高、保障低、耗时耗力。
基于改变现有工作模式的客观要求,爬壁机器人呈现出了因应用不同而多元化的状态。但是,各类设计都试图利用自身的运动结构去适应复杂多变的壁面环境,从而独立完成尽可能繁杂的任务。这样做,不仅增加了机器人的质量,还使控制系统变得复杂化——移动载体的复杂程度与壁面工作可靠度之间的矛盾一直是阻碍壁面机器人实用化的主要矛盾。
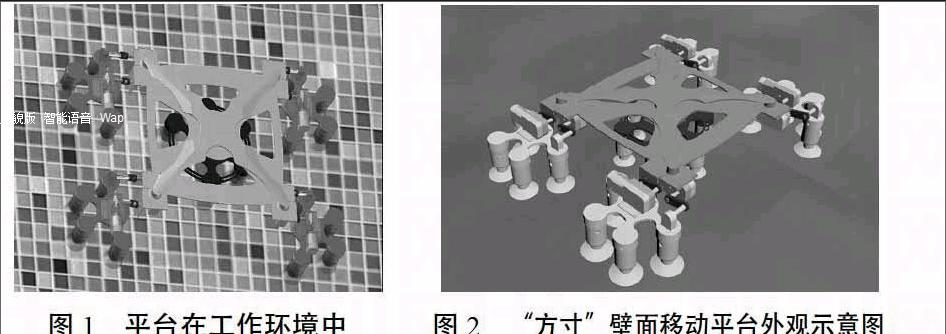
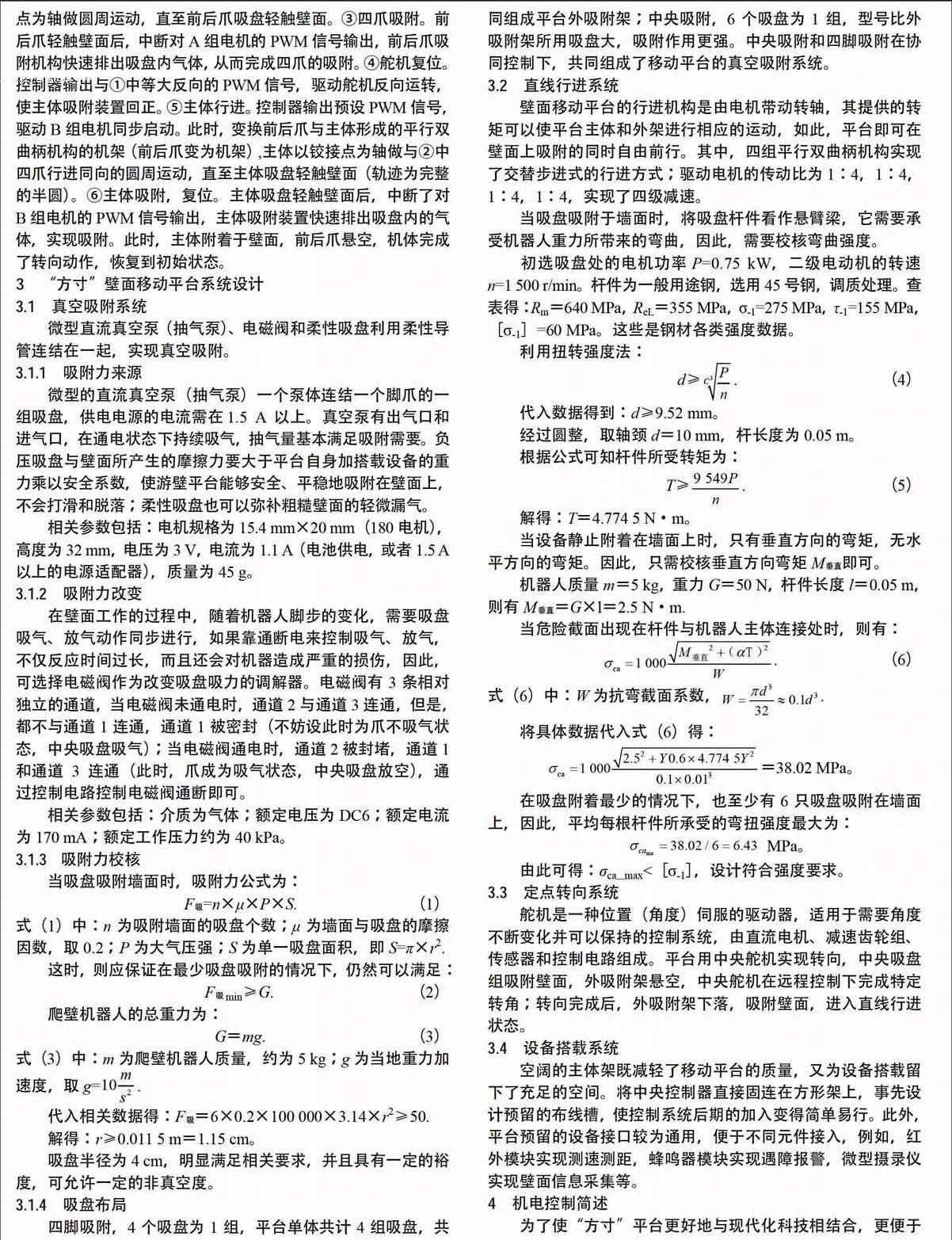
经过反复研究,我团队将壁面移动功能和基于壁面移动的其他附加功能彻底分离,专注于平台单体的设计研发,力求该平台行进稳、负载强、质量轻、结构紧,并留出了搭载设备的空间和控制接口,在其上搭建探测、消防等微型功能装置后,可将其广泛推广、应用于军事、消防、工程、石化和船舶等领域。该平台在工作环境中的状态如图1所示。
2 基本功能和工作过程
2.1 基本功能概述
游壁平台在工作过程中,吸附系统可以保证游壁平台紧贴壁面而不出现打滑和脱落的现象;行进机构和转向机构可以使游壁平台在壁面上稳定前行并自由转向;外接的功能系统在游壁平台行进的过程中可以独立完成相应的工作。
机体基本设计参数为:长350 mm,宽210 mm,工作高度80 mm;净重1.5 kg,行进速度为1.0 m/min。
适用作业范围:玻璃壁面、瓷砖幕墙、油漆漆面等光滑的垂直壁面。
基本功能:壁面吸附、直线行进、定点转向、设备搭载和远程控制等。
2.2 工作过程一览
“方寸”壁面移动平台的外观如图2所示。
为了确保能够生动、形象地阐述相关内容,以下简称游壁平台主体为“主体”,称前后两组外吸附架分别为“前爪”“后爪”(两组平行双曲柄机构);主体搭载的4个减速电机记为“A组”,前后爪搭载的4个减速电机称为“B组”;设定初始状态为主体附着于壁面,前后爪悬空。
图1 平台在工作环境中 图2 “方寸”壁面移动平台外观示意图
2.2.1 壁面直线动作分解
一个完整的壁面直线行进动作可分解为以下几步:①四爪行进。使用者通过控制器(蓝牙模块实现通信)输出预设PWM信号(正/反转),驱动A组电机同步启动,进而带动前后爪与主体形成的平行双曲柄机构(主体为机架)等速运转,前后爪以主体上铰接点为轴做圆周运动,直至前后爪吸盘轻触壁面。②四爪吸附。前后爪轻触壁面后,中断对A组电机的PWM信号输出,控制电磁阀令前后爪吸附机构快速排出吸盘内的气体,从而完成四爪的吸附动作。③主体脱离。主体吸附装置快速吸气,主体脱离墙体。④主体行进。控制器输出预设PWM信号(正/反转),驱动B组电机同步启动。此时,变换前后爪与主体形成的平行双曲柄机构的机架(前后爪变为机架),主体以铰接点为轴做与①中四爪行进同向的圆周运动,直至主体吸盘轻触壁面(轨迹为完整的半圆)。⑤主体吸附。主体吸盘轻触壁面后,中断对B组电机的PWM信号输出,主体吸附装置快速排出吸盘内的气体,进而完成主体的吸附。⑥四爪脱离,复位。前后爪吸附装置快速排气,四爪脱离墙体。此时,主体附着于壁面,前后爪悬空,机体完成一个周期的壁面直线行进过程,恢复到初始状态。
2.2.2 定点转向动作分解
一个完整的转向动作可分解为以下几步:①主体转向。控制器输出一定周期的预设PWM信号,驱动舵机向预设方向转动固定的角度,进而带动主体和前后爪实现定角度转向。②四爪行进。控制器输出预设PWM信号(正/反转),驱动A组电机同步启动,进而带动前后爪与主体形成的平行双曲柄机构(主体为机架)等速运转(此时,前后爪仍处于悬空状态),前后爪以主体上铰接点为轴做圆周运动,直至前后爪吸盘轻触壁面。③四爪吸附。前后爪轻触壁面后,中断对A组电机的PWM信号输出,前后爪吸附机构快速排出吸盘内气体,从而完成四爪的吸附。④舵机复位。控制器输出与①中等大反向的PWM信号,驱动舵机反向运转,使主体吸附装置回正。⑤主体行进。控制器输出预设PWM信号,驱动B组电机同步启动。此时,变换前后爪与主体形成的平行双曲柄机构的机架(前后爪变为机架),主体以铰接点为轴做与②中四爪行进同向的圆周运动,直至主体吸盘轻触壁面(轨迹为完整的半圆)。⑥主体吸附,复位。主体吸盘轻触壁面后,中断了对B组电机的PWM信号输出,主体吸附装置快速排出吸盘内的气体,实现吸附。此时,主体附着于壁面,前后爪悬空,机体完成了转向动作,恢复到初始状态。
3 “方寸”壁面移动平台系统设计
3.1 真空吸附系统
微型直流真空泵(抽气泵)、电磁阀和柔性吸盘利用柔性导管连结在一起,实现真空吸附。
3.1.1 吸附力来源
微型的直流真空泵(抽气泵)一个泵体连结一个脚爪的一组吸盘,供电电源的电流需在1.5 A 以上。真空泵有出气口和进气口,在通电状态下持续吸气,抽气量基本满足吸附需要。负压吸盘与壁面所产生的摩擦力要大于平台自身加搭载设备的重力乘以安全系数,使游壁平台能够安全、平稳地吸附在壁面上,不会打滑和脱落;柔性吸盘也可以弥补粗糙壁面的轻微漏气。
相关参数包括:电机规格为15.4 mm×20 mm(180电机),高度为32 mm,电压为3 V,电流为1.1 A(电池供电,或者1.5 A以上的电源适配器),质量为45 g。
3.1.2 吸附力改变
在壁面工作的过程中,随着机器人脚步的变化,需要吸盘吸气、放气动作同步进行,如果靠通断电来控制吸气、放气,不仅反应时间过长,而且还会对机器造成严重的损伤,因此,可选择电磁阀作为改变吸盘吸力的调解器。电磁阀有3条相对独立的通道,当电磁阀未通电时,通道2与通道3连通,但是,都不与通道1连通,通道1被密封(不妨设此时为爪不吸气状态,中央吸盘吸气);当电磁阀通电时,通道2被封堵,通道1和通道3 连通(此时,爪成为吸气状态,中央吸盘放空),通过控制电路控制电磁阀通断即可。
相关参数包括:介质为气体;额定电压为DC6;额定电流为170 mA;额定工作压力约为40 kPa。
3.1.3 吸附力校核
当吸盘吸附墙面时,吸附力公式为:
F吸=n×μ×P×S. (1)
式(1)中:n为吸附墙面的吸盘个数;μ为墙面与吸盘的摩擦因数,取0.2;P为大气压强;S为单一吸盘面积,即S=π×r2.
这时,则应保证在最少吸盘吸附的情况下,仍然可以满足:
F吸min≥G. (2)
爬壁机器人的总重力为:
G=mg. (3)
式(3)中:m为爬壁机器人质量,约为5 kg;g为当地重力加
速度,取g= .
代入相关数据得:F吸=6×0.2×100 000×3.14×r2≥50.
解得:r≥0.011 5 m=1.15 cm。
吸盘半径为4 cm,明显满足相关要求,并且具有一定的裕度,可允许一定的非真空度。
3.1.4 吸盘布局
四脚吸附,4个吸盘为1组,平台单体共计4组吸盘,共同组成平台外吸附架;中央吸附,6个吸盘为1组,型号比外吸附架所用吸盘大,吸附作用更强。中央吸附和四脚吸附在协同控制下,共同组成了移动平台的真空吸附系统。
3.2 直线行进系统
壁面移动平台的行进机构是由电机带动转轴,其提供的转矩可以使平台主体和外架进行相应的运动,如此,平台即可在壁面上吸附的同时自由前行。其中,四组平行双曲柄机构实现了交替步进式的行进方式;驱动电机的传动比为1∶4,1∶4,1∶4,1∶4,实现了四级减速。
当吸盘吸附于墙面时,将吸盘杆件看作悬臂梁,它需要承受机器人重力所带来的弯曲,因此,需要校核弯曲强度。
初选吸盘处的电机功率P=0.75 kW,二级电动机的转速n=1 500 r/min。杆件为一般用途钢,选用45号钢,调质处理。查表得:Rm=640 MPa,ReL=355 MPa,σ-1=275 MPa,τ-1=155 MPa,[σ-1]=60 MPa。这些是钢材各类强度数据。
利用扭转强度法:
d≥ . (4)
代入数据得到:d≥9.52 mm。
经过圆整,取轴颈d=10 mm,杆长度为0.05 m。
根据公式可知杆件所受转矩为:
T≥ . (5)
解得:T=4.774 5 N·m。
当设备静止附着在墙面上时,只有垂直方向的弯矩,无水平方向的弯矩。因此,只需校核垂直方向弯矩M垂直即可。
机器人质量m=5 kg,重力G=50 N,杆件长度l=0.05 m,则有M垂直=G×l=2.5 N·m.
当危险截面出现在杆件与机器人主体连接处时,则有:
. (6)
式(6)中:W为抗弯截面系数, .
将具体数据代入式(6)得:
=38.02 MPa。
在吸盘附着最少的情况下,也至少有6只吸盘吸附在墙面上,因此,平均每根杆件所承受的弯扭强度最大为:
MPa。
由此可得:σca_max<[σ-1],设计符合强度要求。
3.3 定点转向系统
舵机是一种位置(角度)伺服的驱动器,适用于需要角度不断变化并可以保持的控制系统,由直流电机、减速齿轮组、传感器和控制电路组成。平台用中央舵机实现转向,中央吸盘组吸附壁面,外吸附架悬空,中央舵机在远程控制下完成特定转角;转向完成后,外吸附架下落,吸附壁面,进入直线行进状态。
3.4 设备搭载系统
空阔的主体架既减轻了移动平台的质量,又为设备搭载留下了充足的空间。将中央控制器直接固连在方形架上,事先设计预留的布线槽,使控制系统后期的加入变得简单易行。此外,平台预留的设备接口较为通用,便于不同元件接入,例如,红外模块实现测速测距,蜂鸣器模块实现遇障报警,微型摄录仪实现壁面信息采集等。
4 机电控制简述
为了使“方寸”平台更好地与现代化科技相结合,更便于推广和应用,拟采用基于Arduino 开源平台的单片机嵌入式控制系统。平台内可选用的硬件种类丰富,可根据需要选择基于AVR、ARM Cortex-M3的处理内核。由此,增强了“方寸”壁面移动平台的功能适应性和外载系统的负载性,使其被应用于更多的领域,满足多功能的工作要求。
4.1 直线运动控制
为了实现远程控制,游壁平台将采用无线信号传输。对于蓝牙无线控制系统,蓝牙模块(底板3.3 V LDO,输入电压为3.6~6 V,未配对时的电流约为30 mA,配对后约为10 mA)利用杜邦线与Arduino连接,可实现蓝牙传输。
运动控制步骤为:①上位机发出指令信号。②蓝牙模块接收信号,并将其传输至中央控制I/O接口。③中央控制端处理信号。④如果是转向信号,则要向舵机发出符合要求的数字信号;如果是前进信号,则要向直流电机驱动板L298N发出信号。
4.2 定点转向控制
控制中央舵机实现转向,通过发送信号指定输出轴旋转的角度。在转向控制系统中,舵机电源独立于中央控制系统,单独供电,以保证其工作性能。Arduino控制端I/O口产生持续的脉冲来控制转向角度,即脉冲调制,而脉冲决定了舵机转动的角度。
舵机控制流程是:①上位机发出转向指令;②Arduino控制端处理;③输出符合条件的方波;④舵机按照一定角度转向。
4.3 真空吸附控制
微型气泵组采用大功率高转速直流电机驱动。采用大功率电机专用驱动芯片L298N可以直接驱动2路直流电机,驱动电流达2 A,而电机输出端采用高速肖特基二极管作为保护。
“方寸”壁面移动平台需要驱动四路直流电机,使用2块L298N共同工作。当控制端收到前进信号后,向2块L298N驱动板发送指令信号,使其驱动直流电机工作,进而完成相应的动作。
4.4 搭载设备控制
4.4.1 红外测距模块
使用夏普GP2D12红外测距传感器与Arduino核心控制板串口连接。GP2D12是一款Sharp公司生产的红外线测距传感器,它被广泛应用在各个领域。“方寸”爬壁机器人就是使用它来完成测距测速功能的。
4.4.2 超声波定位模块
超声波测距模块能提供2~450 cm的非接触式感测距离,测距精度高达3 mm,能很好地满足正常要求。其工作过程是:①发射超声波;②遇到障碍物返回声波;③将距离相关信息转化为数字量输出;④信号输入核心控制端;⑤实现测距和避障。
4.4.3 蜂鸣器报警模块
小型蜂鸣器因其体积小(直径只有6 mm)、质量轻、价格低、结构牢靠,被广泛应用于各种需要发声的电器设备、电子制作和单片机等电路中。蜂鸣器管脚分别与GND和制订数字信号的I/O接口相连,当遇到障碍需要停止前进时,由Arduino扩展板控制蜂鸣器以500 Hz的频率鸣叫。
5 项目总结
基于改变传统人工壁面作业模式的客观需求,我团队初步研发完成了“方寸”壁面平台——远程控制的可在垂直壁面上平稳吸附、灵活行进,并且可搭载特种设备完成相关作业的壁面移动平台。
该平台主要从结构、运动和功能3方面创新,在结构设计上,设计了微型气泵和电磁阀的组合,将爬壁负压需求分散到中央和四足吸盘组,增加了机械的可靠度;在运动方式上,依据仿生原理,模仿肉食蜘蛛捕食的方式,采用四足和躯体交替式前进,以增强平台的稳度;中央转向装置工作灵活,有效地解决了爬壁机器人转向难的问题;在功能实现上,留有功能模块的传感器接口,给予平台更大的负载空间和负载能力。
对于平台本身,避开了“多功能”的复杂性,只专注于壁面移动,有效地解决了平台运动复杂度与结构可靠性之间的矛盾,能初步替代人力从事高空壁面工作。此平台的开发能在未来军事、消防和工业生产等领域中起到举足轻重的作用——梦想何不千里之外,精彩尽在方寸之间!
参考文献
[1]机械设计手册编委会.机械设计手册[M].北京:机械工业出版社,2005.
[2]刘旭辉,金沛.高楼外墙游壁平台的功能与外形设计[J].河南机电高等专科学校学报,2010,18(6).
[3]梅燕民,彭光正,范伟.气动爬墙机器人[J].液压气动与密封,2002(1).
[4]杨建元.吸附型壁面攀爬游壁平台研究[D].西安:西北工业大学,2007.
[5]熊则男,乔宗亮.压缩机中的力学分析[M].北京:机械工业出版社,1997.
〔编辑:白洁〕