基于动力学与运动学的四轮全向移动机器人轨迹跟踪控制
2015-06-15王国胜
王国胜, 夏 凡, 吕 强, 刘 峰
(装甲兵工程学院控制工程系,北京 100072)
基于动力学与运动学的四轮全向移动机器人轨迹跟踪控制
王国胜, 夏 凡, 吕 强, 刘 峰
(装甲兵工程学院控制工程系,北京 100072)
建立了四轮全向移动机器人的运动学模型和动力学模型,并分析了四轮全向移动机器人执行器的机械特性。在此基础上,利用反馈控制设计了四轮全向移动机器人的运动学控制器,利用逆动力学补偿控制设计了四轮全向移动机器人的动力学控制器,实现了基于动力学与运动学的四轮全向移动机器人轨迹跟踪控制系统设计。最后,利用Matlab/Simulink完成了基于动力学与运动学的四轮全向移动机器人轨迹跟踪控制仿真实验,实验结果验证了该轨迹跟踪控制方法的有效性。
四轮全向移动机器人;轨迹跟踪;运动学;动力学
由于轮式机器人具有结构简单、状态稳定等特点,现已广泛应用于工业和服务等领域。轮式机器人的类型多种多样,其中全向移动机器人因其可以在任意状态下向任意方向移动而备受关注[1-2]。
早期的全向移动机器人控制策略是基于运动学模型设计的[3],而未考虑全向移动机器人的动力学模型。Morin等[4]提出了可以忽略动力学模型的假设条件;但是Martins等[5]提出了当系统存在不确定性、时变参数时或者当机器人快速移动时,不可以忽略机器人的动力学模型,从而使得基于动力学的机器人控制研究成为热点。Song等[6]提出了一种逆动力学补偿控制策略,其将经典控制和鲁棒控制相结合,实现了机器人控制;Kao等[7]利用动力学模型提出了基于积分滑模变结构的机器人控制;Ebrahim等[8]提出了基于一阶和二阶滑模的逆动力学补偿控制方法。
滑模控制是一种鲁棒性较强的控制方法,在机器人控制中取得了广泛的应用。Hwang等[9]将模糊控制和滑模控制相结合,实现了移动机器人轨迹跟踪控制;Zhang等[10]针对非完整性移动机器人设计了动态滑模控制策略。因此,本文将动力学模型和运动学模型相结合,利用经典PID控制和滑模控制实现四轮全向移动机器人逆动力学控制,完成其轨迹跟踪控制设计并通过仿真实验验证了其控制效果。
1 四轮全向移动机器人的数学模型
1.1 四轮全向移动机器人的运动学模型
四轮全向移动机器人的运动学坐标系如图1所示,其中:Ow-XwYw是以现场的特定点为原点的基准坐标系;Or-XrYr为相对坐标系;(xw,yw,θw)、(xr,yr,θr)分别为基准坐标系、相对坐标系下四轮全向移动机器人的位姿;vi(i=1,2,3,4)为四轮全向移动机器人的轮胎线速度;θ为四轮全向移动机器人的方位角,其中θ=θr=θw;L为全向轮到机器人中心的距离。

图1 四轮全向移动机器人的运动学坐标系
对图1进行分析可知:四轮全向移动机器人的4个轮胎线速度分别为
(1)

相对坐标系下坐标与基准坐标系下坐标之间满足以下转换关系:
(2)
将式(2)代入式(1),可得四轮全向移动机器人的轮胎线速度为
(3)
1.2 四轮全向移动机器人的动力学模型
四轮全向移动机器人的动力学坐标系如图2所示,其中fi(i=1,2,3,4)为4个全向轮上电机的驱动力。

图2 四轮全向移动机器人的动力学坐标系
四轮全向移动机器人的总能量由动能、势能及能量损失3部分组成,其中:动能包括平移运动动能、旋转运动动能和电机旋转动能;势能为重力势能。对图2进行分析,可知四轮全向移动机器人的平移运动动能T1、旋转运动动能T2和电机旋转动能T3分别为[11]
(4)
(5)
(6)


(7)
(8)
(9)
式中:mm为机器人主体的质量;ml为全向轮的质量;2Lc为底座的一边长度;τg为电机的转矩;R为轮胎半径。
系统中存在能量损失主要是由系统中电机旋转时受摩擦阻力和底座旋转时受地面摩擦阻力所致。四轮全向移动机器人的能量损失方程为

(10)
式中:Da为底座旋转时与地面的摩擦因数;Dm为电机的黏性摩擦因数。
因为四轮全向移动机器人在平面上运动,所以其重力势能V=0。设
则第二类Lagrange方程为
(11)
式中:τ=(Fx,Fy,Fθ)T,为机器人所受的驱动合力,包括平移力和旋转力矩;q=(x(t),y(t),θ(t))T,为机器人在基准坐标系下坐标。
综合式(4)-(10),可知式(11)中左端3项分别为

(12)
(13)
(14)
将式(12)-(14)代入式(11),可得
(15)
对减速直流电机特性进行分析,可知四轮全向移动机器人的驱动力为
(16)
式中:Kt为电机转矩常数;Ui为电机的电压;Ra为电机的电枢电阻;n为电机的齿轮减速比;ωi为轮子转速。
对图2进行分析,可知四轮全向移动机器人所受的驱动合力τ与4个驱动力的关系式为
(17)
将式(17)写成如下矩阵形式:

(18)
将式(16)、(18)代入式(15),可得四轮全向移动机器人的动力学模型为

(19)
式中:U=(U1,U2,U3,U4)T,ω=(ω1,ω2,ω3,ω4)T。
2 四轮全向移动机器人的轨迹跟踪控制设计
基于运动学和动力学的四轮全向移动机器人轨迹跟踪控制流程如图3所示。动力学控制的目的是使机器人在驱动力的控制下跟踪由运动学控制得到的速度控制信号;运动学控制的作用是根据位姿的误差得出速度信号,使得机器人可以在速度信号的控制下跟踪目标位置。

图3 基于运动学和动力学的四轮全向移动机器人轨迹跟踪控制流程
2.1 四轮全向移动机器人的运动学控制设计
定义期望轨迹为
式中:xd(t)、yd(t)分别为机器人在Xw、Yw轴上的期望位置;θd(t)为期望姿态角。
定义期望速度为
式中:vxd、vyd分别为机器人在Xw、Yw轴上的分速度;wd为机器人绕中心旋转的旋转速度。
当机器人在期望轨迹上运动时,满足如下关系:
令四轮全向移动机器人的轨迹跟踪误差为
(20)
对式(20)求导,可得
(21)
针对式(21),取反馈控制为
(22)
式中:kx、ky和kθ为运动学参数,均大于0。由式(22)可得
(23)
由
可知跟踪误差渐近稳定,从而全向移动机器人在运动控制(23)作用下可跟踪期望轨迹。
2.2 四轮全向移动机器人的动力学控制设计
因为vi=Rωi,其中ωi为机器人全向轮的角速度。由式(3)可知
(24)
将式(24)代入式(19),可得

(25)
式中:
到了山西,不吃碗正宗的刀削面,那绝对算空走一趟。山西刀削面一讲刀工,二讲浇头,小小一碗面,里面有很多门道。削面功夫全凭手的劲头掌控,削出的面似空中飞舞的柳叶,又似水中畅游的银鱼,中厚边薄,均匀有致,长短六寸,方为上品。
如实际系统存在扰动,则式(25)可写为

(26)

取控制律
U=G+(r1+r2),
(27)


(28)

由式(27)可得
r1=GU-r2,
(29)
由式(26)可得
(30)
基于式(29)、(30),可得

(31)
由式(28)可得

(32)
由式(31)、(32)可得


(33)
将式(33)写成如下状态方程形式:

(34)
式中:
选取滑模面为σ=TX,其中



(35)
式中:

3 仿真实验
假设四轮全向移动机器人的运动学模型和动力学模型的参数为L=0.12 m,m=2 kg,I=1.013 kg·m2,Kt=0.014,R=0.03 m,Ra=1.9 Ω。设定期望轨迹为
设定四轮全向移动机器人的初始位置为x=1.36,y=0.63,θ=0。选取运动学参数为kx=ky=kθ=0.8。选取动力学参数为ρ=40,H0=0.7H,d=(0,0,0)T,

图4 四轮全向移动机器人的速度误差随时间变化的曲线

图5 四轮全向移动机器人的动力学控制电压随时间变化的曲线

图6 四轮全向移动机器人的动力学控制力矩随时间变化的曲线
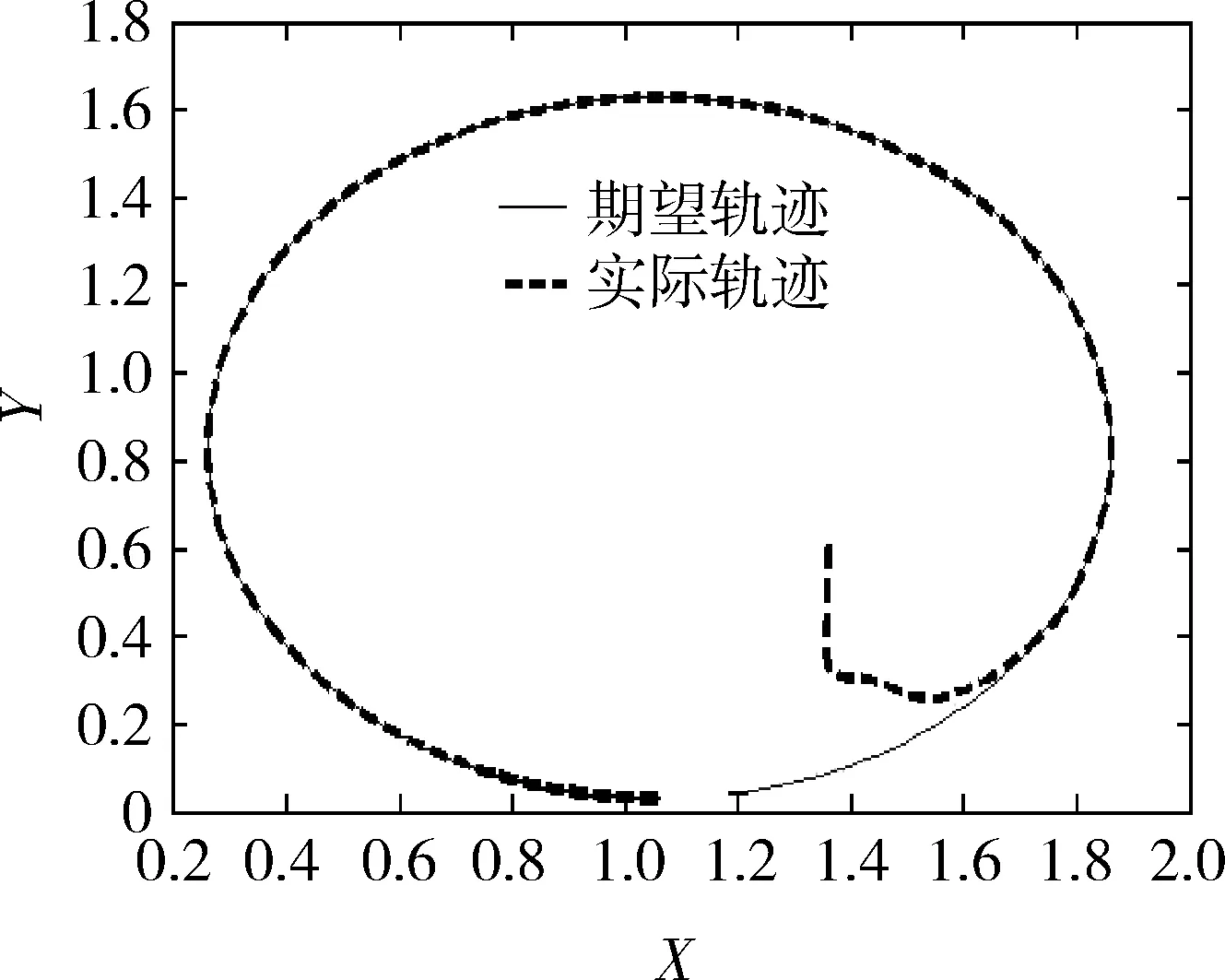
图7 四轮全向移动机器人的轨迹跟踪效果随时间变化的曲线

图8 四轮全向移动机器人的轨迹跟踪误差随时间变化的曲线
由图4可知:四轮全向移动机器人在动力学控制下速度误差逐渐稳定且无稳态误差。由图5、6可知:四轮全向移动机器人在动力学控制下电机提供的电压及电机输出的力矩基本呈对应关系。由图7、8可知:该仿真实验中四轮全向移动机器人轨迹跟踪准确且响应速度快。
4 结论
本文基于四轮全向移动机器人的运动学和动力学模型,提出了经典PID控制和滑模控制相结合的逆动力学补偿控制策略,通过仿真实验验证了该策略在四轮全向移动机器人轨迹跟踪中的有效性,结果表明:该策略能满足四轮全向移动机器人轨迹跟踪控制的快速性和稳定性要求。
[1] 王国胜, 吕红涛, 吕强. 四轮全向移动机器人的双闭环速度控制系统设计[J]. 装甲兵工程学院学报, 2013, 27(1): 59-64.
[2] Wang G S, Xia F, Guo F, et al. Design of Positioning System for Indoor Mobile Multi-robot Platform Based on Image Features[C]∥Proceedings of the 11th World Congress on Intelligent Control and Automation. Shenyang, China: IEEE, 2014: 5149-5154.
[3] Kanayama Y, Kimura Y, Miyazaki F. A Stable Tracking Control Method for an Autonomous Mobile Robot[C]∥Proceedings of International Conference of Robotics and Automation. Cincinnati, USA: IEEE, 1990: 384-389.
[4] Morin P, Samson C. Motion Control of WMRs [J]. Handbook of Robotics, 2008, 4(3): 799-826.
[5] Martins F N, Celeste W C, Carelli R, et al. An Adaptive Dynamic Controller for Autonomous Mobile Robot Trajectory Tracking [J]. Control Engineering Practice, 2008, 16(8): 1354-1363.
[6] Song Y D, Mitchell T L, Lai H Y. Control of a Type of Nonlinear Uncertain Systems via Compensated Inverse Dynamics Approach [J]. IEEE Transactions on Automatic Control, 1994, 39(9): 1866-1871.
[7] Kao S T, Chiou W J, Ho M T. Integral Sliding Mode Control for Trajectory Tracking Control of an Omnidirectional Mobile Robot[C]∥Proceedings of Asian Control Conference. Kaohsiung, Taiwan: IEEE, 2011: 765-770.
[8] Ebrahim S E, Martins N A, Edson R P. On a Wheeled Mobile Robot Trajectory Tracking Control: 1st and 2nd Order Sliding Modes Applied to a Compensated Inverse Dynamics[C]∥Proceedings of 11th Pan-American Congress of Applied Mechanics. Brazil: IEEE, 2010: 345-349.
[9] Hwang C L, Wu H M. Hybrid Fuzzy Sliding-mode Under-actuated Control for Trajectory Tracking of Mobile Robot in the Presence of Friction and Uncertainty[C]∥Proceedings of IEEE World Congress on Computational Intelligence. Brisbane, Australia: IEEE, 2012: 117-123.
[10] Zhang R L, Zhang Y P, Xue Z H, et al. The Review and Implementation of Multi-robot System Simulation Software[C]∥Proceedings of the 26th Chinese Control and Decision Conference. Changsha, China: IEEE, 2014: 3869-3874.
[11] Xiao J, Xie L H, Khanna N, et al. Cooperative Control in HNMSim:A 3D Hybrid Networked MAS Simulator[C]∥Proceedings of Control Automation Robotics & Vision. Guangzhou, China: IEEE, 2012:626-631.
(责任编辑:尚彩娟)
Trajectory Tracking Control of Four-wheels Omnidirectional Mobile Robot Based on Dynamics and Kinematics
WANG Guo-sheng, XIA Fan, LÜ Qiang, LIU Feng
(Department of Control Engineering, Academy of Armored Force Engineering, Beijing 100072, China)
The kinematics model and the dynamic model of four-wheels omnidirectional mobile robot are established, and the actuators’ mechanical characteristics of four-wheels omnidirectional mobile robot are analyzed. In order to realize the trajectory tracking control based on kinematics and dynamics of four-wheels mobile omnidirectional robot, the kinematics controller of four-wheels omnidirectional mobile robot is designed by using the feedback control method and the dynamics controller of four-wheels omnidirectional mobile robot is designed by using the inverse dynamic compensation control method. Finally, the trajectory tracking control experiment of four-wheels omnidirectional mobile robot based on kinematics and dynamics is made by using Matlab/Simulink and the simulation results validate the effectiveness of the proposed trajectory tracking control method.
four-wheels omnidirectional mobile robot; trajectory tracking; kinematics; dynamics
1672-1497(2015)01-0054-06
2014- 11- 05
王国胜(1975-),男,副教授,博士。
TP242
A
10.3969/j.issn.1672-1497.2015.01.011
