面向任务的战术行动自主协同关系模型
2015-06-15郭宏志田卫萍高英武
郭宏志,田卫萍,高英武
(1.北方自动控制技术研究所,太原 030006;2.解放军95881部队,北京 100094)
面向任务的战术行动自主协同关系模型
郭宏志1,2,田卫萍1,高英武1
(1.北方自动控制技术研究所,太原 030006;2.解放军95881部队,北京 100094)
在信息化战争的大背景下,战术行动中团队协同作战一直是研究的重点问题,而如何建立自主协同关系是团队协同研究的一个难点问题。在分析已有团队协同理论和框架的基础上,提出一种面向任务的战术行动自主协同关系模型建立方法。该模型首先根据当前战场态势和上级任务发布自主协同任务集合,各作战单元根据战场态势和自主决策自愿参与自主协同任务,其次利用作战单元与自主协同任务间的相互关系实现对关键角色的判断。如果关键协同成员参与自主协同任务则自主协同关系建立成功,反之,建立失败。
信息化战争,战术行动,自主协同,面向任务,协同关系模型
0 引言
随着信息技术的发展及其在军事领域的广泛应用,军队的作战样式发生了巨大的变化。战争形式从传统的机械化战争发展到了当今的以信息中心战为主导的体系对抗形式。信息化战争是一种全新的、全面发挥信息化武器装备作用的战争,是信息技术等新技术推动下的新军事革命的结果。
纵观过去十几年发生的高科技战争,可以发现信息化改装后的武器装备往往较传统装备在作战能力上有较大的提升,特别在战场态势感知能力和装备协同作战能力方面较为显著。事实上,信息化装备在很大程度上提高各作战单元之间的协同作战能力。信息化作战中的协同主要体现在作战单元利用信息共享、相互协调并统一行动。各作战单元在遂行作战任务的过程中形成一个交叉网络,作战单元间存在交集,战场节奏的加快要求各作战行动单元必需有一定自主决策性和战场信息知识获取的多渠道性。并且由于信息化战争中战术级协同作战日趋呈现多兵种的自主协同,无论从技术研究的角度还是应用前景的角度考虑,研究战术行动自主协同作战是亟需的。但是要想实现自主协同作战,首先是各个作战单元建立自主协同的关系。因此,本文重点介绍战术行动自主协同关系建立的原理和模型,探讨具有单一目标的协作算法和应用集合覆盖理论的作战任务协作分配算法。从而为研究战术行动自主协同作战模型打下良好地基础。
1 研究现状
近年来,国内外提出了多种团队协同理论和协同框架[1-11]。在理论研究方面,最具代表性的协同理论是Cohen&Levesque[2]于1991年提出的联合意图理论以及Grosz&Kraus[3]于1996年提出的共享计划理论。联合意图理论聚焦于团队的联合心智状态,为了在一个团队中实现有效的协同,需要在团队的所有成员间建立联合目标。共享计划理论则侧重于在协同过程中描述整个团队的意图和信念。由Tambe领导的Teamcore研究小组,基于联合意图理论和共享计划理论开发了通用的协同行为框架Steam[7],该框架可以对团队目标、计划和联合承诺进行明确的表示,同时考虑了通信代价问题。
联合意图理论的中心思想是保证团队中的所有成员联合承诺去执行某项团队行动A(Action)。联合承诺描述了团队的所有成员对某项团队行动A作出的共同承诺,同时相信每个成员都将努力实现它。联合承诺可以定义为一个团队的联合持续目标T(Target),是指团队共同去完成团队行动A,当团队成员共同相信持续条件C(Condition)为假时,团队放弃联合持续目标T。当且仅当下列3个条件满足时,团队的联合持续目标T得以建立:①所有的团队成员共同相信当前行动A的状态为假;②所有的团队成员将行动A作为共同目标,并想将其状态变为真;③所有的团队成员共同相信,当行动A已经完成、已无法完成或者不再相关时,所有团队成员会将A作为一个弱目标WT(Weak Target)。弱目标WT满足下列两个条件之一时成立,其中M(Member)是团队中的成员:
●成员M相信当前的目标T为假,并最终想将其变为真。
●由于持续条件C为假,导致成员M个人认为T已达到、已无法完成或者已不相关时,成员M承诺将此私有信念变为团队的共同信念。
可以看出,联合意图理论为实现具体的多智能体协作提供了基本的框架。但在具体实现时还需要根据相关领域的需求对联合意图理论进行扩展。文献[7]在作战仿真领域,该理论的应用存在不足,具体表现在:
●实际作战过程中团队协作需要面对具体的任务,联合意图形成过程也需要对任务进行表示。
●联合意图形成过程中,应该面向特定的任务进行协作成员的选择。
●上述理论没有考虑协作人员对任务完成的重要程度(即是否属于完成该任务的关键角色),增加了形成团队的时间。
因此,为了更真实地对实际作战协作过程进行表示,并在保证真实性的同时提高联合意图的形成效率,必须对现有的联合意图形成方法进行扩展,满足作战的需要。
2 自主协同概念
信息化条件下战场流动性大,作战节奏快,敌我双方的战场态势和作战行动始终处于动态和高度变化之中,战前所确定的协同计划,不可能包罗所有情况,总会有预想不到的情况发生,原有协同计划很可能难以适应变化了的战场情况。甚至在情况发生重大变化时,原有计划失去作用。在这种情况下,就要求指挥员及其指挥机关不能墨守成规、不思变通而拘泥于原有协同计划,要善于冷静观察,正确分析与判断变化了的情况,找到变化的根本,及时调整作战力量,改变协同方式、方法,恢复和构建新的协同关系,从而保持稳定和连续的协同[12-14]。
自主协同,是协同的更高层次,隶属于协同,定义是:作战单元不需要外部指令,在满足一定约束条件下,依托共享信息,围绕同一目标,几乎同步地自发调整各自的行动,以求达成力量上的内聚融合和功能上的耦合放大,从而取得最佳的作战效果。
自主协同主要表现:一是当战场情况发生局部变化,部分协同遭到破坏,局部战场或部分作战部队行动出现失控时,应在坚持原定协同计划的同时,及时做出修正,调整和补充,尽一切努力恢复破坏了的协同。二是当战场情况发生了意想不到的重大变化,使整个作战协同受到严重影响时,应及时果断地构建新的协同关系,有效地协调各参战力量,形成新的合力,确保实现预定作战目标。
自主协同原则,一要以实现上级和首长意图、决心为前提。上级和首长意图、决心的确定和实现,是作战协同的依据,离开了上级和首长意图、决心,作战协同也就失去了明确的方向。即使是在情况发生新的重大变化时,也要以上级和首长新的决心为依据,控制作战进程和节奏,划分新的作战阶段,搞好新的协同。二要以战场和各作战力量的实际情况为根本出发点。自主协同不是盲目协同,指挥员及其指挥机关应当及时掌握战场和各作战力量的实际情况,准确预见作战的发展趋势,并以此为出发点,灵活地协调作战行动。
本文在文献[7]的研究基础上,结合实际的团队协同行为,基于组织行为理论和联合意图理论提出了一种面向任务的战术行动自主协同关系模型,并在已有研究工作的基础上进行了一些关键的修改来反映作战领域中的实际约束。
3 面向任务的自主协同关系建立
军队作战,主要是面向具体的任务目标进行。任务执行过程中,如果没有明确的指挥员,成员之间在不违反作战条例的情况下可以进行自主协同作战。任务执行过程中,当某一成员无法单独完成所承担的任务时,该成员则根据当前的战场态势、具体任务和完成该任务需要的组织角色,请求其他能够合作完成该任务的相关成员进行协作,在得到肯定答复的情况下进行任务编组,组成临时协同任务团队,该团队的所有成员以所承诺的共同目标为当前任务。当协同任务完成后,团队解散,或者任务失败后,团队重新编组。因此,为了更为真实地表示团队的协同关系建立过程,本文提出一种面向任务的自主协同关系建立方法,用以研究可通信情况下,团队协同作战过程中的共同目标建立,其通信模式如图1所示。

图1 作战单元之间的通信模型示意图
3.1 作战任务协同分配算法
因为在配置完成某个作战任务的作战单元时,这些作战单元都有相对明确的预置功能,即作战系统中的各作战单元本身就是针对完成这个作战任务而存在的,所以,在进行任务分配时一般都能够满足需求[15-16]。由此,本文以集合覆盖理论(SCP)为基础来进行任务分配。经典SCP描述包含一个集合U以及U内元素构成的若干各小类集合S,目标是找到S的一个子集,该子集满足所含元素包含了所有的元素且使小类集合个数最少。例如,U= {1,2,3,4,5},S={{1,2},{3,4},{2,4,5},{4,5}},找到集合能满足条件的可以有O={{1,2},{3,4}{4,5}}或是O={{1,2},{3,4},{2,4,5}},至于具体选哪种组合,还有引申的一个问题:WSC,即Weighted Set Cover加权集合覆盖,每个集合类被赋予不同的权值,从而由权值决定最终的选择。
给定两个集合E和S,元素的集合E和E的子集的集合S,求出S的子集C,使得C中所有集合的并等于E,同时使得|C|最小。这就是经典的集合覆盖问题(SCP)。它是NP-hard类的最优化组合问题。
因此,本文根据SCP算法原则,在考虑当前态势和实现上级和首长意图决心的前提下,本文设计作战任务协同分配算法如图2所示。方法的具体过程描述如下:①上级根据当前战场态势和首长决心,分解作战任务;②各作战单元根据自身特点向上级汇报完成每个子任务的能力(加权值1);③各作战单元根据自身能力向上级汇报完成每个子任务的所需付出的代价(加权值2);④上级根据下级作战单元汇报以及对下级单位的定位,计算完成每个作战子任务的所花费的最小代价值(寻优);⑤上级根据最优方案形成作战任务分配方案;⑥各作战单元确认分配方案;⑦各作战单元分配方案上级报备。
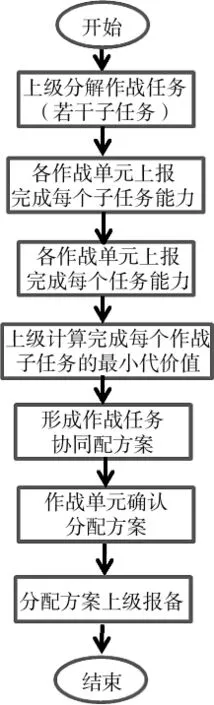
图2 作战任务协同分配流程示意图
此算法应用于上级指挥所根据作战任务总目标和下属各作战单元的个体能力,将每个作战子任务分配给下属各作战单元独立完成或几个作战单元协同完成,原则是在完成任务的前提下,付出的代价最小,获得的收益最大。
3.2 自主协同关系建立方法
协同任务团队:当多个作战单元为了完成同一目标而协调行动时,则组成协同任务团队。
协同任务:是指一个或者多个作战单元需要完成的目标。任务可以由上级指派或者由作战单元自身根据战场态势进行决策得出。
角色:是指一个协同团队中作战单元所处位置的抽象表示。通常,一个角色代表了需要团队来完成的任务的一个子集的抽象,它不依赖于由哪个具体的作战单元来实施。
关系:定义为角色与角色之间、角色与任务之间的约束。
根据当前态势或者上级下达的任务,当作战单元判断需要组成协同任务团队进行协同时,此时需要首先建立自主协同关系。建立自主协同关系的流程如图3所示。方法的具体过程描述如下:
第1步:发布自主协同任务集合。协同发起作战单元根据当前战场态势和上级下达的任务,发布自主协同任务集合,任务的分解遵循任务独立性原则,对于有依赖关系的子任务用上述给出的关系描述规范表示。
第2步:确定自主协同角色。自愿参与自主协同任务的作战单元根据自主协同任务确定自己在协同团队里面担当的角色。
第3步:建立自主协同任务团队。各作战单元在确认能够完成自主协同任务后,自愿参与自主协同任务团队,形成自主协同任务团队。自主协同发起者确定自主协同成员的关键程度以及各协同成员之间的关系(主从关系、一对多关系、对等关系等)。
第4步:等待协同成员确认。自主协同任务团队中的每个成员通过confirm或refuse进行响应是否参与自主协同任务。
第5步:等待确认。如果所有协同成员都返回了confirm,说明所有协同成员已自愿建立协同关系,转第7步(建立自主协同关系成功)。如果协同成员没有全部确认,则判断响应时间阈值是否超时,没有超时,则继续等待;如果超时则转第6步。

图3 面向任务的自主协同关系建立流程
第6步:检查未响应协同成员关键程度:
(1)自主协同发起的作战单元根据自主协同任务关系判断当前未返回confirm或者返回refuse的作战单元是否属于关键角色。如果是,则形成自主协同关系建立失败,返回失败。
(2)如果不是关键角色,则说明总任务的完成不依赖于这一作战单元任务的完成,转第7步。
第7步:建立自主协同关系成功。
与已有的协同关系建立方法[2,7]不同,本文提出的方法并没有直接向所有的作战单元发出协同请求,而是首先考虑了任务因素,各个作战单元根据上级下达的任务将自主协同任务发布出来,在此基础上选取了能够完成该任务的作战单元并形成自主协同任务团队,协同请求只需向团队内的成员发出即可。理论上,所形成的自主协同任务团队既可以完成任务,又降低了建立自主协同关系所需的通信量。其次,在等待确认过程中,已有的算法要求必须所有的成员返回confirm,才能建立自主协同关系,否则建立自主协同关系失败。而实际作战过程中,只要能够完成关键任务的作战的能源参与,自主协同即可建立。因此,本文方法中对未响应和返回refuse协同成员的角色进行了判断,虽然影响了自主协同关系的建立时间,但可以更为真实地反映实际的自主协同关系建立过程,理论上还可以提高自主协同关系建立的成功率。
4 结论
本文研究信息化战争条件下的面向任务的战术行动自主协同关系模型,在结合现有协同关系建立模型基础上,探讨了应用集合覆盖理论的作战任务协作分配算法,重点研究战术层次自主协同关系的原理和模型,考虑了上级任务、战场态势、作战单元角色及其相互关系对自主协同关系建立的影响,有效提高了自主协同关系建立的形成效率,增强了自主协同关系建立过程的真实性。由于信息化战争中战术级协同作战日趋呈现多兵种的自主协同,因此,无论从技术研究的角度还是应用前景的角度考虑,面向任务的战术行动自主协同关系原理和模型的研究都是亟需的。
[1]冯磊,查亚兵,胡记文.面向任务的CGF实体联合意图形成[J].系统仿真学报,2012,24(10):2113-2116.
[2]CohenPR,LevesqueH J.Teamwork[J].Nous(S0029-4624),1991,25(4):487-512.
[3]Grosz B,Kraus S.Collaborative Plans for Complex Group Action[J].Artificial Intelligence(S0738-4602),1996,86(2):269-357.
[4]Jennings N R,Mamdani E H,Laresgoiti I,et al.GRATE:A General Framework for Cooperative Problem Solving[J]. Journal of Intelligent Systems Engineering(S0963-9640),1992,1(2):102-114.
[5]Rich C,Sidner C.Diamond Help:A Generic Collaborative Task Guidance System[J].AI Magazine(S0738-4602),2007,28(2):33-46.
[6]Lesser V,Decker K,Wagner T,et al.Evolution of the GPGP/T?MS Domain-Independent Coordination Framework[J].Autonomous Agents and Multi-AgentSystems(S1387-2532),2004,9(1):87-143.
[7]Tambe M,Zhang W X.Towards Flexible Teamwork in Persistent Teams:Extended Report[J].Autonomous Agents and Multi-Agent Systems(S1387-2532),2000,3(2):159-183.
[8]郝莉莉,顾浩,杨惠珍.Simulink/Stateflow的AUV群体协作合同网快速原型仿真[J].火力与指挥控制,2013,38(2):26-30.
[9]王国师,李强,杨征.多预警机情报协同任务控制研究[J].计算机应用研究,2011,28(7):2606-2609.
[10]张维明.一体化联合作战导论[M].北京:军事科学出版社,2010.
[11]黄建明,高大鹏.基于OODA环的作战对抗系统动力学模型[J].系统仿真学报,2012,24(3):41-44.
[12]冯磊,查亚兵,胡记文.CGF中的协同行为建模技术[J].系统仿真学报,2014,25(4):591-598.
[13]冯磊,查亚兵,胡记文.一种基于辩论的协作型CGF分层协商模型[J].国防科技大学学报,2011,33(5):78-82.
[14]周昊,覃征,邢剑宽.基于多Agent的多无人机协同决策算法仿真平台设计[J].系统仿真学报,2012,24(3):587-593.
[15]廖沫,陈宗基.基于MAS的多UAV协同任务分配与设计[J].系统仿真学报,2007,19(10):2313-17.
[16]韩月敏,刘非平,刘丽巧.陆战Agent协作机制模型研究[J].指挥控制与仿真,2009,31(6):6-10.
Formation of Task-oriented Tactical Action Initiative Collaborative Relationship Model
GUO Hong-zhi1,2,TIAN Wei-ping1,GAO Ying-wu1
(1.North Automatic Control Technology Institute,Taiyuan 030006,China;2.Unit 95881 of PLA,Beijing 100094,China)
The development of information technology has greatly promoted the revolution in military affairs.Cooperative combat is the key research problem.And how to establish initiative collaborative relationship is a difficult problem for the research of collaborative team.Combined with the demand of reality for human behavior representation in domain of combat simulation,an initiative cooperative behavior modeling framework was designed.According to the current situation and superior task,the new method first built the task aggregation and forms the task team,the combat unit independent decision whether or not to participate in initiative collaborative task,and then the estimation of critical roles could be realized by using the correlation between entities and tasks.If key cooperative members participate in initiative collaborative task,the initiative collaborative relationship building success.Conversely,the initiative collaborative relationship building failure.
information warfare,tactical action,initiative collaborative,task-oriented,cooperative relation model
E917;TP391
A
1002-0640(2015)03-0170-05
2014-01-16
2014-03-22
郭宏志(1979- ),男,河南安阳人,博士后。研究方向:指挥自动化建模。