基于改进平方根UKF双向滤波的单站无源定位算法
2015-06-15姜秋喜孙志勇
张 智,姜秋喜,孙志勇
(电子工程学院,合肥 230037)
基于改进平方根UKF双向滤波的单站无源定位算法
张 智,姜秋喜,孙志勇
(电子工程学院,合肥 230037)
针对单站无源定位可观测性弱、观测噪声大而导致的定位精度低、稳定性差和收敛速度慢等问题,在结合平方根无迹卡尔曼滤波(Square-Root Unscented Kalman Filter,SRUKF)以及后向平滑思想的基础上,提出了一种改进SRUKF的双向滤波算法。该算法采用Q-R分解的形式,使用误差协方差的平方根代替协方差参与递推运算,提高了算法的稳定性与运算效率。同时,该算法对状态向量进行扩维,将过程噪声与观测噪声通过非线性系统传播,降低了噪声对滤波精度的影响,并利用当前时刻滤波结果通过Rauch-Tung-Striebel(RTS)后向平滑得到再次前向滤波更高精度的起始值,提高了算法的定位精度与收敛速度。仿真结果表明,新算法在保证实时性的基础上改善了单站无源定位的性能。
单站无源定位,平方根无迹卡尔曼滤波,后向平滑,Q-R分解,扩维
0 引言
单站无源定位系统仅采用一个观测平台对目标辐射源进行跟踪定位,且本身不向外辐射电磁波,具有系统相对独立、设备简单、隐蔽性强、机动性好以及作用距离远等优点,是当前无源定位领域的研究热点。
从本质上来讲,单站无源定位就是一个典型的非线性滤波问题。因此,寻找一种定位精度高、收敛速度快和稳定性好的滤波算法是需要研究解决的一个核心问题[1]。扩展卡尔曼滤波(Extend Kalman Filter,EKF)及其衍生算法的核心是通过对非线性方程进行泰勒级数展开,并作一阶近似来实现线性化,其不但需要计算复杂的雅克比矩阵,而且近似线性化带来的误差会导致滤波结果不稳定甚至发散。无迹卡尔曼滤波(Unscented Kalman Filter,UKF)[2-5]通过选取确定的加权采样点来逼近随机变量的概率分布,其不仅避免了雅克比矩阵的计算,还使精度至少达到二阶,优于EKF及其衍生算法。
但在单站无源定位的实际应用中,由于可观测性弱、观测噪声大以及数值计算舍入误差等因素影响,容易造成定位精度低、收敛速度慢和滤波性能不稳定甚至不能工作等问题。针对这些问题,本文在文献[6-7]的启发下,提出一种改进SRUKF的双向滤波算法。该算法对状态向量进行扩维,通过在非线性系统中传播过程噪声与观测噪声,降低了噪声对滤波精度的不良影响,并利用k时刻的滤波结果通过Rauch-Tung-Striebel(RTS)后向平滑[8-9]得到k-1时刻的状态预测值,其后将其作为初始值再对k时刻的状态进行前向滤波。由于利用了当前k时刻的观测值信息,经过后向平滑能够得到k-1时刻更加精确的状态预测值,以此作为初始条件再次进行前向滤波就能得到当前k时刻更加准确的估计值,提高了算法的定位精度与收敛速度。同时,采用Q-R分解的形式,并使用误差协方差的平方根进行运算,提高了求逆运算的效率,保证了误差协方差的正定性,特别是避免了协方差矩阵在后向平滑中两正定矩阵相减后失去正定性,从而提高了新算法的稳定性与运算效率。仿真结果表明,新算法在保证实时性的前提下,提高了单站无源定位的定位精度、收敛速度和数值稳定性。
1 单站无源定位模型

图1 观测站与目标的位置关系示意图


其中,fT为目标辐射源的载频,c为电磁波的传播速度,dx与dy分别为观测站内相互正交干涉仪的基线长度。
2 改进SRUKF双向滤波算法
2.1 基于Q-R分解的扩维SRUKF算法
基于Q-R分解的扩维SRUKF算法[7]采用误差协方差矩阵的平方根代替协方差矩阵进行递推运算,能够提高滤波算法的运行效率和数值稳定性。同时,该算法对状态变量进行扩维,通过在非线性系统中传播过程噪声与观测噪声,降低了噪声对滤波精度的不良影响,能够改善滤波算法的精度。其具体流程如下:


式中,xa=[xTwTvT]T,N=dx+dw+dv,dx为状态向量的维数,dw和dv分别为状态噪声与观测噪声向量的维数,λ=α2(N-κ)-N为尺度因子,α控制采样点的分散程度,通常设置为一较小的正数(10-4≤α≤1),κ是辅助尺度因子,β在高斯噪声条件下取2最优,chol表示Cholesky分解。
(2)确定采样点

(3)时间更新

(4)量测更新
①计算矩阵T11、T21以及T22:


②计算卡尔曼滤波增益:

其中,符号表示右除。
③计算状态估计值:

④计算状态估计误差协方差矩阵的平方根:

2.2 基于Q-R分解的RTS后向平滑
RTS后向平滑由于求取协方差矩阵时涉及两正定矩阵相减,有可能破坏协方差矩阵的正定性和对称性。故本文采用基于Q-R分解的后向平滑算法[7],使用协方差矩阵的平方根进行递推运算,避免了两正定矩阵的相减,提高了数值稳定性以及求逆运算的计算效率。该算法的具体流程如下:
(1)计算矩阵U11、U21以及U22:
(2)计算平滑增益:

(3)计算平滑预测值:

(4)计算状态预测误差协方差矩阵的平方根:
2.3 第2次前向滤波
2.4 改进SRUKF双向滤波算法的流程
本文提出的改进SRUKF的双向滤波算法的实现流程如图2所示,其中①、②、③表示算法的运算顺序,其执行过程具体为:



图2 改进SRUKF双向滤波算法流程示意图
本算法采用Q-R分解的形式,并使用误差协方差的平方根进行递推运算,提高了新算法的稳定性与运算效率。同时,其对状态变量进行扩维,通过在非线性系统中传播过程噪声与观测噪声,降低了噪声对滤波精度的不良影响,并利用k时刻的滤波结果通过后向平滑获得k-1时刻更加精确的状态预测值,以此作为初始条件再次进行前向滤波就能得到当前k时刻更加准确的估计值,从而提高了算法的定位精度与收敛速度。
3 仿真实验及结果分析
假设在三维直角坐标系中,观测站固定于原点,目标辐射源的初始位置为(170,130,8)km,速度为(-240,120,0)m/s。为了验证本文算法(简称ISRUKFS)的性能,在不同的观测精度下将其同SRUKF以及文献[6]所提出的SRURTS算法的性能进行对比,其中各组参数观测精度如下:

在仿真实验中,观测周期T=1 s,观测次数N=100,系统误差为wxk=wyk=wzk=1 m/s2,辐射源信号的载频fT=10 GHz,观测站中相互正交干涉仪的基线长度分别为dx=10 m,dy=5 m。滤波器的参数选择为:α=0.001,β=2,κ=0。采用相对距离误差(Relative Range Error,RRE)作为评价标准,每一组做100次Monte Carlo实验,在定位结束时刻RRE<15%,则视作本次实验收敛,否则视为发散。定位精度为跟踪结束时刻RRE的平均值,如表1以及图3~图5所示(剔除了不收敛的实验结果)。


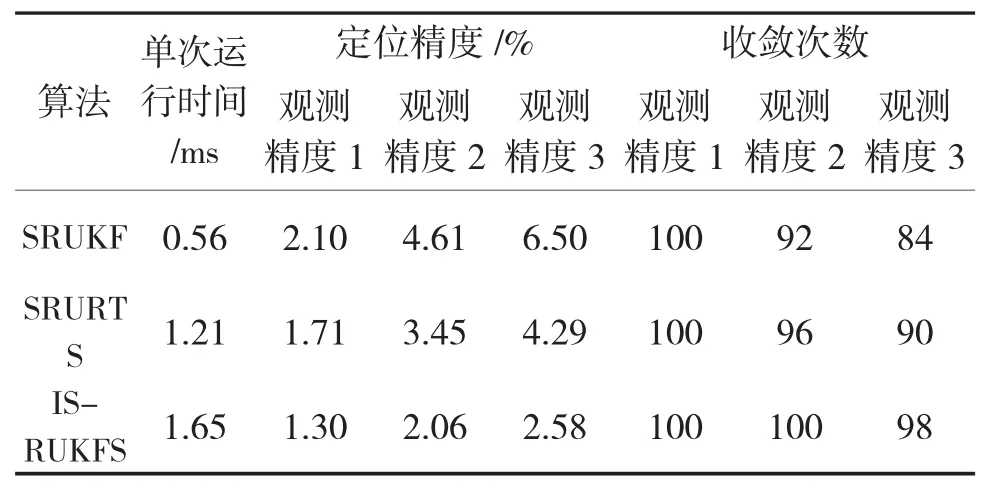
表1 不同算法的性能比较

图3 观测精度1时,各算法的相对位置误差曲线

图4 观测精度2时,各算法的相对位置误差曲线
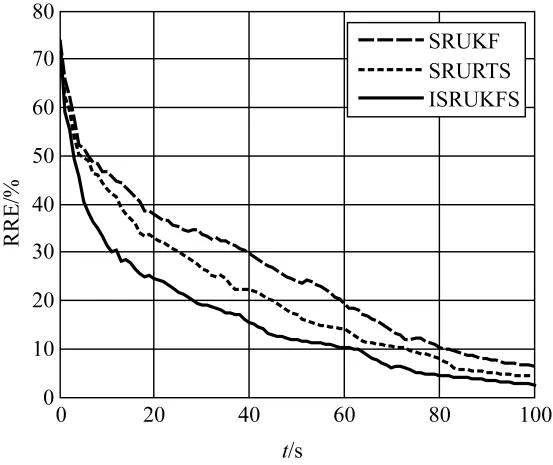
图5 观测精度3时,各算法的相对位置误差曲线
从表1、图3~图5可以看出,在高精度观测时,各算法都能很快收敛,且定位精度都比较高,但随着观测精度的降低,各算法的定位精度开始下降,收敛速度变慢,且滤波发散的次数开始增多。相比之下,ISRUKFS的性能最好,其他依次为SRURTS以及SRUKF,且在低观测精度时各算法的性能差别更明显。由图5可以看出,当观测精度低时,由于SRURTS采用RTS后向平滑为二次前向滤波提供了更为精确的初始值,故无论是定位精度还是收敛速度都优于SRUKF。而ISRUKFS在双向滤波的过程中,将过程噪声与观测噪声都扩展进状态变量,降低了噪声对滤波性能的不良影响,提高了定位的精度以及收敛速度。
从表1可以看出,当观测精度降低时,虽然SRURTS采用了平方根滤波,但由于在后向平滑过程中两正定矩阵相减容易失去正定性与对称性,造成滤波结果发散甚至无法运行。而ISRUKFS采用Q-R分解的形式,避免了正定矩阵相减的运算,故稳定性优于其他两种算法。
在Intel酷睿双核,CPU主频2.6 GHz,内存2 GB的计算机使用Matlab7.10运行各算法,分别得到单次运行时间如表1所示,可见由于SRURTS与SRUKF相比,增加了后向平滑和二次前向滤波,计算量是后者的2倍多。ISRUKFS虽然采用了Q-R分解的形式,提高了运算效率,但扩维处理增加了一定的计算量,所以该算法单次运行时间最长。然而,在保证实时性的前提下,这种增加少量计算量来换取定位精度、收敛速度以及稳定性的较大改善是值得的。
4 结束语
本文提出了一种改进SRUKF双向滤波算法并应用于单站无源定位领域。该算法采用Q-R分解的形式,使用误差协方差的平方根进行递推运算,同时其对状态变量进行扩维,通过在非线性系统中传播过程噪声与观测噪声,降低了噪声对滤波精度的不良影响,并通过后向平滑为二次前向滤波提供更为精确的初始值。仿真实验表明,该算法在满足实时性要求的基础上,提高了单站无源定位的精度、收敛速度以及稳定性。当对定位精度要求较高但观测精度较低时,在保证实时性的前提下,以增加计算量来换取定位性能的改善是可行的。因此,本文提出的算法对单站无源定位系统的研究具有一定的工程应用价值,同时也适用于其他非线性滤波领域。
[1]孙仲康,郭福成,冯道旺,等.单站无源定位跟踪技术[M].北京:国防工业出版社,2008.
[2]Julier S J,Uhlman J K.Unscented Filter and Nonlinear Estimation[J].Proceedings of IEEE,2004,92(3):401-422.
[3]程水英,张剑云.基于无味卡尔曼滤波的空对海单站无源BO-TMA[J].电路与系统学报,2008,13(1):49-55.
[4]曲长文,徐征,苏峰,等.基于UKF和后向平滑的单站无源定位跟踪算法[J].现代防御技术,2010,38(5):131-134.
[5]张刚兵,刘渝,胥嘉佳.基于UKF的单站无源定位与跟踪双向预测滤波算法[J].系统工程与电子技术,2010,32(7):1415-1418.
[6]黄耀光,高博,李建新,等.基于平方根UKF双向滤波的单站无源定位算法[J].数据采集与处理,2013,28(2):207-212.
[7]Rutten M G.Square-root Unscented Filtering and Smoothing[C]//Proc.of the International Conference on Intelligent Sensors,Sensor Networks and Information Processing,2013:294-299.
[8]Rauch H E,Tung F C,Striebel T.Maximum Likelihood Estimates of Linear Dynamic System[J].AIAA Journal,1965,80(3):1445-1450.
[9]Simo Sarkka.Unscented Rauch-Tung-Striebel Smoother[J]. IEEE Transactions on Automatic Control,2008,53(3):845-849.
Forward-Backward Filter Based on Improved Square Root UKF for Single Observer Passive Location
ZHANG Zhi,JIANG Qiu-xi,SUN Zhi-yong
(Electronic Engineering Institute,Anhui,Hefei 230037,China)
Because of the low observability and the high noise in single observer passive location,the performance of the positioning accuracy,stability and convergence velocity is poor.Based on the Square-Root Unscented Kalman Filter(SRUKF)and the backward smoothing method,a forwardbackward filter based on improved SRUKF is presented.To improve the stability and the calculate efficiency of the algorithm,the Q-R decomposition is adopted,and the covariance square-root matrix is used instead of the covariance matrix.Meanwhile,the state vector is augmented.The process noise and measurement noise are propagated through the nonlinearity system.The negative influence of noise on the filtering accuracy is decreased.The more accurate initial value for the next filtering process was obtain by the use of the current filtering results,based on the Rauch-Tung-Striebel(RTS)backward smoothing method.The positioning accuracy and the convergence velocity is improved.Simulation results indicated that the novel algorithm improved the single observer passive location performance while keeping the real-time characteristic.
single observer passive location,square root unscented kalman filter,backward smoothing,Q-R decomposition,augmented
TP958.97
A
1002-0640(2015)03-0116-05
2014-01-21
2014-03-25
张 智(1985- ),男,福建建阳人,博士研究生。研究方向:无源定位、雷达与雷达对抗信息处理。
