轮毂电机驱动太阳能赛车参数匹配及巡航控制
2015-06-13王军年王庆年唐德隆张君彦
王军年,张 煦,康 丹,王庆年,唐德隆,张君彦
(1.吉林大学 汽车仿真与控制国家重点实验室,长春130022;2.重庆理工大学 汽车零部件制造及检测技术教育部重点实验室,重庆400054)
0 引 言
澳大利亚世界太阳能汽车挑战赛两年一度。比赛要求各参赛队伍必须自行设计并制造一辆太阳能车并驾驶它完成每天400 km 的比赛。其中,6∶ 00-8∶ 00 为充电时间,8∶ 00-17∶ 00 为比赛时间,参赛赛车需在17∶ 00 前到达终点,否则将没有成绩[1]。
因为现有电动车都是基于日常使用而设计,参数设计与本文所述有很大区别。例如为了保证使用寿命,电池SOC 可以降至20%~30%[2],而参加比赛用的电动汽车电池可以认为只使用一次,因此SOC 可以降到15%~20%甚至更低,以缩短比赛时间;另外,日常使用的电动汽车由于考虑急加速、爬坡等要求,动力总成后备功率较大。而本文研究的比赛用太阳能电动车在整个比赛过程中速度波动不大,路面较平整,对功率要求不高,大功率电机会增加整车负载和占用空间等。为了尽可能地减少功率消耗,提高电机负荷率,依据赛制匹配出合适的动力总成、拟定一套合适的车速控制策略很有必要。
本文以吉林大学太阳能车队设计的太阳能赛车为基础,依据比赛赛制,对关键动力总成进行了参数匹配,深入研究了巡航车速控制策略,并采用Matlab 进行了仿真验证。
1 构型设计
首先根据比赛要求分别对车身和底盘进行了优化设计[3]。为了减小空气阻力,选择流线型的车身设计,同时,为了有足够的空间安放太阳能电池板,将车顶部设计为平面,具体车身外形如图1所示。

图1 车身外形Fig.1 Car body shape
在底盘设计方面。本车采用三轮结构,后轮为驱动轮/制动轮,前两轮为转向轮。为了减轻整车自身质量,降低传动和附加损耗,在驱动部分选用轮毂电机作为动力输出装置[4],底盘具体结构如图2 所示。
综上所述,赛车车身为流线型,单后轮采用轮毂电机驱动车辆行驶,两前轮为从动轮,仅负责转向。
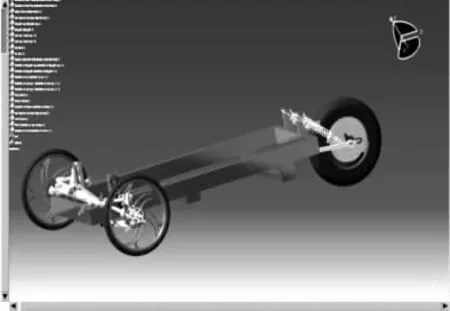
图2 底盘布置Fig.2 Car chassis layout
根据外形和底盘设计以及驾驶者身材情况,太阳能车基本参数设置如下:传动比i=1(轮毂电机);车轮半径r=0.33 m;电机效率ηt=0.85;车轮转动惯量Iw=0.85 kg·m2;赛车空载质量m=201.4 kg;电机转动惯量Ie=0.6 kg·m2;轴距L=2.0 m;车身尺寸为3.7 m×1.7 m×1.1 m;滚动阻力系数f=0.02;轮距B=1.3 m;空气阻力系数与迎风面积乘积CDA=0.4 N·s2·m-2。
2 动力总成参数匹配
2.1 汽车行驶阻力及功率分析
由于当地赛道平缓,因此设计分析时忽略坡度阻力的影响。太阳能电动车以车速u 在路面上行驶时,驱动力与行驶阻力平衡方程如式(1)所示:

式中:Ft为驱动力;Ff为滚动阻力;Fw为空气阻力;Fj为加速阻力;Ttq为电机转矩。
在电动汽车行驶过程中假定绝对风速为零,功率平衡式为:

2.2 轮毂电机参数匹配
为了简化传动系设计,减少能量在传动系上的消耗,选用一个无减速器的轮毂电机作为驱动电机。设计时从以下3 个方面来初步选择电机功率:①满足汽车预期的最高车速;②满足一定的加速时间;③满足汽车类匀速行驶的平均功率需求。
2.2.1 由最高车速决定的电机功率
太阳能赛车基本以类匀速车速行驶,在电量充足、路况良好路面以类匀速车速中的峰值车速umax行驶:

此时电机效率较高,该车速对应的电机功率为P1,即峰值车速行驶时行驶阻力功率之和为:

2.2.2 由平均车速决定的电机功率
由平均车速um行驶对应的电机功率为P2。初步估计可知,太阳能小车大致以某一基本固定车速类匀速跑完全程,此时电机发出的功率为:

2.2.3 由起步加速时间决定的电机功率
考虑太阳能车并非以动力性决定成绩,故起步加速至最优行驶车速的加速过程并非全力加速,此加速过程可以简化为匀加速行驶,当赛车以优化后的起步加速度加速到目标车速瞬间(详见3.3.2 节),在整个行驶工况内,此时所需要的驱动力最大:

式中:Fr为行驶阻力,此时所需功率P3=Ftmaxum。
综上所述,电机的最大输出功率Pmax应取P1、P2、P3中的最大值[5],计算可知,P3>P1>P2,但考虑到计算P3时取加速过程的末速度带来的计算误差(若要准确计算加速时功率需求,应通过车速对时间积分求得[5]),电机峰值功率Pmax可适当降低要求,根据由Pe确定的选型电机参数确定;额定功率Pe依据P2确定[6]。
2.3 太阳能电池板的匹配
由于成型的太阳能电池板质量一般很大,为了整车的轻量化,采用单晶硅片拼接成满足总功率需求的太阳能电池阵列。此外根据赛制规定,比赛过程中太阳能车所用的所有能量全部来源于赛前2 个小时和比赛过程中太阳能电池板所吸收的太阳能。因此为了尽可能地提高行驶车速,节省行驶时间,选择市面上单体比功率高的太阳能电池板单体。经调研,性能较好的太阳能电池板单体标称输出功率为Ps0=2.6 W,额定输出电压为Us0=0.5 V,平均单片面积为(0.125×0.125)m2。由于太阳能小车有效受光面积为3.5 m2,故总片数Ns=224 片。
据调研,澳大利亚平均光照强度为STC(标准测试状态)光照强度的3 倍以上[7],所以计算功率取单晶硅电池单体标定功率的3 倍,故太阳能电池板总功率Ps=3NsPs0,太阳能电池板总电压Us=NsUs0,蓄电池端电压依据此电压匹配。
2.4 动力电池的选型
首先,鉴于锂电池在能量密度和快速充放电特性上比较有优势[8],因此选择磷酸铁锂电池作为太阳能电动车的动力源。
根据比赛规则,在开始比赛前有两个小时可以利用所选用的太阳能电池板给空容量蓄电池充电,为了让蓄电池尽可能充入较多的电量,而又不能因选择了过大容量的电池而使整车质量增加过多,因此,希望蓄电池的容量正好与所选用的太阳能电池板在两小时内能吸收的能量相等,即两个小时正好将蓄电池充满,则有如下关系:

式中:ηc为电池充电效率,本文取80%;Ub为蓄电池端电压,与电机额定电压U 匹配;C 为蓄电池安时数;W0为蓄电池总容量。
由式(7)可以计算出蓄电池安时数C 和总容量W0。再综合考虑市场上电池的电压、电流、质量、比能量等,选出合适的电池单体节数以及连接方式[9],并根据所选用电池的单位质量能量密度和单位体积能量密度计算出电池组的总质量和总体积。
综上,得到各构件的参数匹配结果如表1 所示。

表1 参数匹配结果Table 1 Parameter matching results
3 车速控制策略
3.1 策略概述
车速控制策略的目的是在符合比赛要求的前提下,以最短的时间到达终点。
整个比赛时所需的总能量不论来自于太阳能电池板还是电池组,其实质皆来自太阳能电池板吸收的太阳能,且能量的多少主要决定于当时天气情况。要想时间最短,必然速度最快,但高速会引起空气阻力和滚动阻力的增加,从而导致对电机功率的需求增大,为了仍保证续驶里程,需要匹配容量更大的电池,由于电池质量是其容量的增函数,而研究表明[10],电池质量是电动汽车质量增加的主要部分,这势必导致汽车质量增加,汽车电耗增大,运输效率下降。若速度过快,很可能在到达终点之前蓄电池能量已耗尽,使总时间不减反增,甚至无法在规定时间内完成比赛。所以如何协调能量与时间的矛盾,结合每时刻太阳能电池板的能量输入情况,确定一个当下最合理的电机转速nopt,既充分地利用所有能量,又在最短时间内到达终点,是比赛的核心问题[11]。另外,起步加速和滑行减速工况时间消耗等细节问题也需考虑。
3.2 平均车速估算
忽略起步加速过程,假设赛车以um匀速完成比赛,期间电池组输出功率基本恒定。比赛过程中消耗的能量与太阳能电池板所吸收的全部能量相等,按照以平均车速匀速行驶的工况来估计,应有如下关系式:
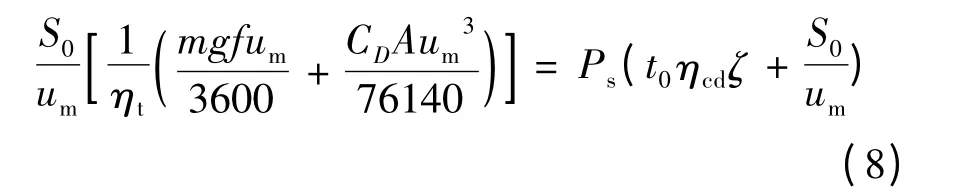
式中:S0为比赛赛程,400 km;Ps为太阳能电池板输出功率;t0为赛前充电时间,2 h;ηcd为蓄电池充放电综合效率,约为60%[2];ζ 为蓄电池放电窗,根据锂离子电池厂家数据资料显示,放电深度达95%时,电池端电压将低于轮毂电机工作电压,且由于内阻急剧增大,放电电流很小,故放电窗假设为95%。
将第2 节中的参数匹配结果带入式(8)可计算得到平均车速um=64.8 km/h。
3.3 控制策略
3.3.1 类匀速行驶工况
经分析,除起步加速和制动停车工况,赛车将根据天气变化,即太阳能电池板输出功率的变化情况,在某一范围内以相对恒定的车速行驶。因调节范围小,称这一工况为类匀速行驶工况。
由于有限的总能量限制了赛车的行驶速度,这需要在能量够用的前提下,让车速尽可能快。故应根据天气和电池板输出能量时刻调整平均车速,即在不同条件下赛车应有不同的最佳行驶速度。以10 s 为一个调整周期,即控制系统每10 s检测一次电池剩余电量Wr、太阳能电池板输出功率Ps、已行驶路程S',计算一个最佳速度uopt,控制电机实现实时调节。设每个实时状态下,赛车在17∶ 00 前完成比赛的时限为tlim,假定电池放电不低于5%电量时,其端电压可以满足电机工作需求,耗尽这些电量的时限为tcom,则跑完剩下路程所需时间为:

所以要使t 最小,u 需取最大,即轮毂电机转速n需取最大。但是还需另外考虑两个约束条件。
(1)需在规定时间内跑完全程,即t ≤tlim。由式(3)(9)可得:

式中:nmin为完成比赛最低允许转速;t 为已行驶时间。
(2)为了保证能量充分利用,比赛终了前应将电池中事先存储的能量消耗尽,即:

式中:Pb为电池组输出功率,当车速作类匀速行驶时,其数值与电机额定功率Pe基本一致。由式(3)(9)可算出到终点时刚好可以耗尽能量的电机转速ncom。
综上所述,要保证在能量足够完成比赛且又无过多盈余能量,电机转速n 的取值为nmin≤n ≤ncom,且应尽可能靠近ncom。
3.3.2 起步加速工况
由上文可知,赛车大致以um=64.8 km/h(即18 m/s 的平均速度)跑完全程。赛车以加速度a匀加速到18 m/s,并以该速度匀速行驶S1,耗时t1为:

忽略滑行制动停车部分,全程功耗W1由加速段功耗W1a和匀速段功耗W1m组成:

式中:


t1、W1与加速度a 的变化关系如图3 所示。
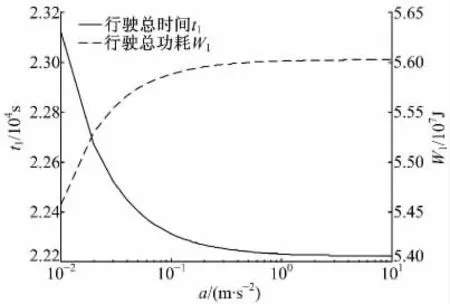
图3 行驶总时间t1 和行驶总功耗W1随加速度a 的变化曲线Fig.3 Cross-plot of whole driving time and power consumption versus acceleration
由图3 可见,要做到用时最短,加速度a 需最大。但加速度过大会使功耗增加,总功耗需小于等于太阳能电池板总输出能量,即:

根据式(16)和图3 取amax作为起步加速度。
3.3.3 滑行减速工况
减速滑行时,如到达终点的末速度小,说明充分利用了惯性,为匀速行驶段省下的能量多,但滑行时间长;如末速度大,滑行时间短,但耗能多。为此需确定一个合适的末速度。假设汽车开始减速时,蓄电池电量已用尽。此时只有太阳能电池板在继续提供能量,输入功率和行驶阻力功率平衡,此时的车速为全程最低匀速行驶车速ulow,有:

设末速度为uf,若uf=ulow,将此时的滑行路程作为减速滑行工况的整个观测路程,设此时以um开始自由滑行至终点的路程为S2,时间为t2,减速度为as:

整个S2路程内耗能为W2,时间为t2。其中,赛车匀速行驶时间为t2m,路程为S2m;滑行时间为t2a,路程为S2a,则有:S2=S2a+S2m。

据此,t2和W2与末速度uf的关系曲线如图4所示。

图4 滑行段时间t2 和滑行段功耗W2随末速度uf 的变化曲线Fig.4 Cross-plot of deceleration time and power consumption versus final speed
由图4 可见,若滑行段末速度每增加一微量所减少的时间等于增加的功耗相应在匀速段增加的时间,则此时的末速度为最佳末速度,即:
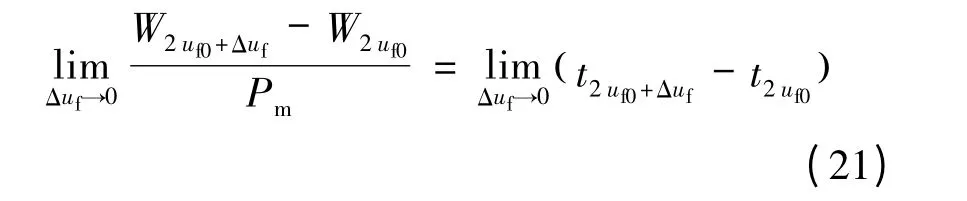
式中:uf0为最佳末速度;Δuf为末速度增加微量;Pm为以平均速度行驶时的阻力功率,此时电动车应在距终点S'2处开始滑行。

3.3.4 类匀速行驶车速控制流程
控制器首先检测剩余电量Wr、电池板输入功率Pb、已行驶距离S',将其输入控制计算单元,代入ncom表达式计算出此时的最佳转速nopt。比较n 与nmin的大小,若n 大于nmin,则输入给电机;若n 小于nmin,则不符合要求,重新测定和计算车速控制指令。
3.4 电机控制模式
3.4.1 起步加速过程
由于起步加速过程要求匀加速(本文取a=2.014 m/s2),所以此时电机以转矩控制为宜,电机目标转矩为:

本文计算结果为Ttq=175.9507+0.0298t2(t 为行驶时间)。
3.4.2 类匀速过程
进入类匀速行驶后,轮毂电机采用转速控制模式。当um=18 m/s 后,每10 s 计算一次nopt,并将其输入电机控制器,实时根据天气情况和电池剩余电量微调电机转速。计算出电机最佳转速nopt,此时由驾驶员按下巡航按键,从而启动转速控制模式。
3.4.3 滑行减速过程
当比赛还剩约360 m 时开始滑行。滑行过程中,电池中能量已耗尽,所有能量均来自太阳能电池板。滑行减速阶段电机处于随动状态,匀速滑行阶段电机仅利用太阳能电池板输入功率以最佳末速度uf0=17.22 m/s 计算的转速进行控制。
综上,得到电机控制模式。
4 仿真验证
为了验证动力总成匹配结果和车速控制策略的正确性和最优性,采用Matlab 对其进行各种车速和加速度情况下的比赛用时仿真试验,结果如图5 所示。由于滑行减速段太短,影响不大,仿真时忽略不计。假定此时为一般天气,光照强度恒定,即电池板输出功率恒定。第1 种情况,若使用本文提出的控制策略,仿真得到速度-时间曲线如图5(a)中实线所示,此时用时6.18 h。把图5(a)中实线的加速段放大后如图5(b)中实线所示。
第2 种情况,若不使用该策略,比赛开始即以一较高的加速度(假定5 m/s2)和速度(假定为70 km/h)行驶,则还未到终点电池电量便耗尽,之后赛车只依靠电池板提供的能量匀速行驶,仿真得到曲线如图5(a)中虚线所示,此时总用时6.93 h。把图5(a)中虚线的加速段放大后如图5(b)中虚线所示。
第3 种情况,若为节省能量完成比赛,一开始即以一较低速度(假定为50 km/h)行驶,加速度仍为2.014 m/s2,则比赛结束后电池能量有剩余,最后总用时8.01 h,仿真结果如图5(a)中点划线所示。把图5(a)中点划线的加速段放大后如图5(b)中点划线所示。
改变几组目标车速和加速度,均得到相类似的结果,因此可知若不以最佳车速行驶,所耗时间均大于最佳车速下行驶所耗的时间。
5 结束语

图5 各种车速和加速度情况下比赛用时对比Fig.5 Time consumption comparsion of different initial speed and acceleration
设计开发了由单一轮毂电机驱动的太阳能电动汽车,并对整车动力总成参数进行了匹配,提出了相应的车速控制策略。通过仿真结果可知,本文提出的动力总成匹配结果和车速控制策略能够使所开发的太阳能赛车比赛时蓄电池能量充分利用,从而避免选配容量较大电池造成质量和能耗增加,并充分利用滑行工况减少了能量需求,最终利用最优车速控制保证在最短时间完成比赛。该最优车速控制策略对普通汽车油箱燃料不足时的车速控制一样具有指导意义。
[1]Green M A.Brain sport:the 1996 world solar challenge solar car race across Australia[J].Progress in Photovoltaics:Research and Applications,1997,5(1):69-76.
[2]董婷婷.增程式电动车能量管理及电池寿命研究[D].长春:吉林大学汽车工程学院,2013.Dong Ting-ting.Study on energy management and battery life for extended-range electric vehicle[D].Changchun:College of Automotive Engineering,Jilin University,2013.
[3]Ozawa H,Nishikawa S,Higashida D.Development of aerodynamics for a solar race car[J].JSAE Review,1998,19(4):343-349.
[4]Lovatt H C,Ramsden V S,Mecrow B C.Design of an in-wheel motor for a solar-powered electric vehicle[J].IEE Proceedings-Electric Power Applications,1998,145(5):402-408.
[5]曾小华,巴特,田浩,等.混联混合动力客车动力系统参数匹配[J].吉林大学学报:工学版,2013,43(2):278-284.Zeng Xiao-hua,Ba Te,Tian Hao,et al.Powertrain parameter matching of series-parallel hybrid electric bus[J].Journal of Jilin University(Engineering and Technology Edition),2013,43(2):278-284.
[6]史文库,吕东慧,梁天也.太阳能电动车动力传动系参数匹配的基础研究[J].太阳能学报,2008,29(8):960-964.Shi Wen-ku,Lü Dong-hui,Liang Tian-ye.A foundation investigation of parameters matching for powertrain of solar electric car[J].Acta Energiae Solaris Sinica,2008,29(8):960-964.
[7]全球太阳能光伏网.2011 澳大利亚太阳能光伏市场调研报告[J].建筑玻璃与工业玻璃,2011(10):39-43.Global Solar Photovoltaic Network.Australia solar photovoltaic market research report in 2011[J].Architectural&Functional Glass,2011(10):39-43.
[8]Kennedy B,Patterson D,Camilleri S.Use of lithiumion batteries in electric vehicles[J].Journal of Power Sources,2000,90(2):156-162.
[9]桂长清.蓄电池组的连接方式与可靠性[J].通行电源技术,2000(1):6-8.Gui Chang-qing.Battery connections method and reliability[J].Telecom Power Technologies,2000(1):6-8.
[10]唐磊.基于混合度的串联混合动力客车特性参数设计[D].长春:吉林大学汽车工程学院,2008.Tang Lei.Parameter design for series hybrid electric bus based on degree of hybridization[D].Changchun:College of Automotive Engineering,Jilin University,2008.
[11]Shimizu Y,Komatsa Y,Torii M,et al.Solar car cruising strategy and its supporting system[J].JSAE Review,1998,19(2):143-149.
