四旋翼飞行器智能控制系统设计
2015-06-11阮仁全
阮仁全

摘 要 四旋翼飞行器在许多领域有着广阔的应用前景。但是四旋翼飞行器控制系统十分复杂,因此本文以AVR单片机为控制核心,设计具有红外传感器智能避障的控制算法,并且拥有良好稳定性的飞行系统的四旋翼飞行器。在此基础上加装远程图像实时传输系统,将图像实时传输回来,从而能做出图像的实时处理。这样才可让飞行器在抢险救灾、地质勘查等领域中有效工作,获得可靠信息,凸显飞行器的实用价值。
关键词 AVR单片机 避障 图像传输系统 控制算法 抢险救灾
一、引言
在一些场合四旋翼飞行器发挥着特有的优势和重要的作用。四旋翼飞行器机动灵活性强,有高度的机动性和有效承载力。四旋翼飞行器可以在悬空静止的状态下瞬时改变其姿态。本文以AVR单片机为控制核心,控制陀螺仪加速计,实现姿态的控制。利用红外传感器可探测障碍信息,将信息反馈给单片机,做出适当的措施进行避障。配以无线遥控模块,可以实现远程操作控制。与此同时,加上无线视频模块辅助,可进行高空拍摄,并将图像信息实时传递,进行无线视频监控,获取的图像传回指定的服务器上,给工作人员提供必要信息做出决策。
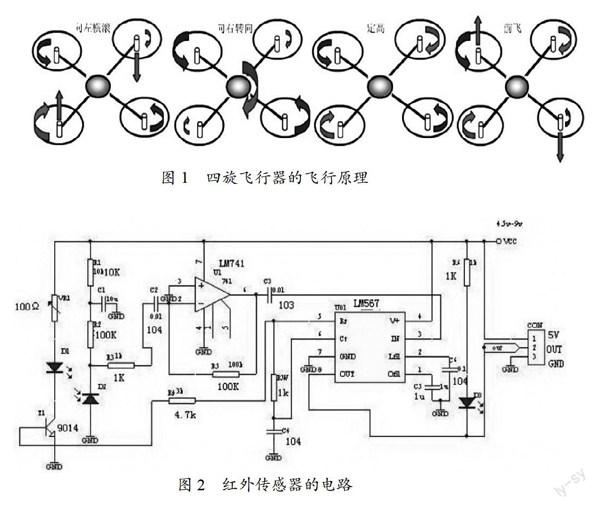
二、四旋飞行器的飞行控制原理
四旋翼飞行器是由2对桨翼组成,飞行动力由这两对旋翼提供的。通常的情况是,只要控制每一个旋翼上的旋转速度,而桨叶的桨矩角和旋翼轴均不变。因为飞行器的的各种姿态是由这两对的桨翼产生的升力和扭力来控制的。桨叶的桨矩角没有必要来调节。每对旋翼上安装正反一对的桨叶。这样,在飞行时正反桨所产生的桨距正好相反,转矩便可以相互抵消。这样就达到了整个飞行器的转矩平衡,不会出现打转现象。当要改变飞行器的的飞行角度时,改变总的转矩,即加大两个正桨或反桨的转矩即可实现。四旋翼飞行器的飞行速度则是由俯仰角和电机的转动速度共同决定的。通过这两者可以达到控制飞行器的目的。图1为飞行器的飞行原理图。
(一)四旋翼飞行器的硬件及结构设计
本飞行器的硬件及结构设计主要是由:支撑部分、旋翼部分、飞行控制部分、红外避障部分、无线遥控部分以及无线图像传输部分组成。
1、支撑部分和旋翼部分
支撑部分即飞行器主机架,由高强度高韧性工程尼龙板、铝合金方管、不锈钢高强度螺丝构成,轴矩为550mm,可折叠设计,简单操作。旋翼部分由电机、桨叶组成。从性能和总重量考虑,选用新西达A2212无刷直流电机,重量48克,选择kv值为1000,扭力大。选用工作电压11V,电流 9.9A,转速7130转,推力650克的电机。可通过调节电机的占空比来调节电压,从而实现转速的调节。根据kv值高配小桨,kv值低配大桨,因此采用与之相应的1045大桨。
(二)飞行控制部分
本飞行器的飞行控制部分主要是由:无刷电调部分、陀螺仪传感器、加速度传感器、大气压传感器等部分组成。
1、无刷电调部分
由于无刷电机使用的是三相交流电,和有刷电机不同,没有电刷。因此要把电池的直流电引入,用电调转化为三相交流电,从而启动无刷电机。同时,电调也起着将电机和单片机相连的作用,因为电机工作是需要大电流和大电压,如果直接将单片机供给大电流的话,单片机则会因电流过大而直接烧毁,不用外部单片机无法提供足够的电压电流。因此本文选用了兼容性好的30A的SkyWalker电调。该电调自带PID控制器,能很好地控制电机,让飞行器平稳的在空中悬停、飞行。
2、陀螺仪传感器
为了采集飞行器三个方向的角速率,本文中采用了3個角速度陀螺仪,型号是ENC-03R。控制器可通过对陀螺仪输出的角加速度进行积分计算获得飞行时要偏离的角度。
3、加速度传感器
由于陀螺仪使用是会出现温度漂移现象,在做完一次相反方向的旋转后,陀螺仪的积分并不为零,存在偏差,在ENC-03R上偏差较厉害些。如果不加以处理出便会出现问题。因此必须用加速度传感测得数据,然后对所获得的数据加以修正补偿。同时,有一种更好修正补偿,就是在此基础上融入卡曼滤波的方法。本文采用飞思卡尔公司生产的MMA7360型号的加速度传感器。
4、大气压传感器
在本系统采用了采用了常用的飞思卡尔公司生产的型号MPX4115大气压传感器,此传感器主要作用是控制飞行器的飞行高度。
(三)红外避障模块
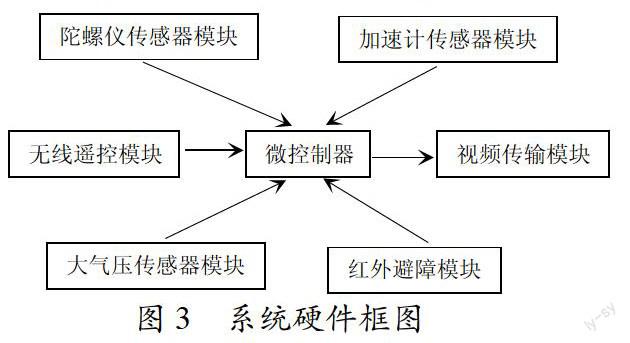
为了增强飞行器的适应性,增加了避障模块。本系统采用广泛运用的红外避障模块。红外传感器是一种比较有效的接近觉传感器。避障传感器通常是一个红外发射电路和红外接收电路组成,这个红外接收管对38KHz的频率比较敏感,红外发射管发射这个波段的红外线,当碰到障碍物后,红外波被反射回来,接收管接收到,就可以判断这个方向上有无障碍物。红外传感器的电路如下图2所示。
(四)无线遥控模块
为了实现远程无线遥控,设计中采用了蓝牙传输模块。通过将与AVR单片机相连,PC机可以通过蓝牙发送器将控制命令传递给飞行控制板上的蓝牙接收器,当蓝牙接收器接受到命令后,可将命令通过UART通讯传给AVR,再由AVR单片机发出PPM波传送到姿态控制模块,来控制飞行器的飞行姿态。
(五)无线视频模块
为了解飞行器经过地方的信息,需要进行图像采集并进行无线传输。本设计中,采用的了COMS 208型彩色无线摄像头。摄像头芯片内自带压缩算法,使得所得图片数据量较小,便于数据的无线传输。数据传输采用FM调制,之后接收端经解调后将图像解压。得到的图像通过视频采集卡传送到上位机上。
三、系统设计
整个硬件系统的设计如下图3所示:
四、软件设计
相对硬件设计,软件设计才是本设计的难点。因此,本系统采用了C语言编程来完成软件方面的设计。其功能主要为,完成接收控制指令,对飞行器的姿态进行控制,完成红外探测到障碍物的避障处理,以及远程视频图像的传输。
五、结论
本系统中的飞行器姿态控制是最难的,要完成好姿态的控制必须对陀螺仪采集回来的信息做好相应的处理,但前提是陀螺仪采集的数据是稳定可靠的。但陀螺仪存在温度漂移,所以应做好修正和补偿。修正前后的陀螺仪波形如图4和如图5所示。
可以看出修正好后的陀螺仪积分就可以收敛了。这样便可以较好完成姿态控制了。只有保持好飞行姿态,其他模块的工作才有意义,才能得以进行,拥有了好的控制算法并配上各模块的协调工作,飞行器便可以在实际生活多领域得以广泛运用。
参考文献:
[1]张鹏,牛苏锋,曹宇强,孙来,王琪,基于一种新型四轴搜救飞行器设计[J].江苏科技大学机电与汽车工程学院,2009.
[2]彭军桥.四桨碟形飞行器飞行控制系统研究[J].上海大学,2003.12.01.
[3] WILSON J. R. MicroSAR Meets MAV [J]. Aerospace American,1999, 10(2):32-35.
[4]刘晓杰.基于视觉的微小型四旋翼飞行器位姿估计研究与实现[D].长春:吉林大学,2009.
[5]范承志,王宇峰,林小娥等.一种位置无传感器无刷直流电动机驱动电路[J].微电机,2001(3):19-20,24.
[6]曹杰,史金飞,戴敏.基于MEGA8单片机的无传感器无刷直流电动机控制系统设计[J].自动化仪表,2005,26(12):13-16.
[7]刘焕晔.小型四旋翼飞行器飞行控制系统研究与设计[J].上海:上海交通大学,2009.
[8]李俊,李运堂.四旋翼飞行器的动力学建模及PID控制[J].中国计量学院,2009.
(作者单位:重庆市工业高级技工学校)
