基于RecurDyn软件坦克悬挂系统动力学仿真*
2015-06-11徐国英姚希民陈靖然
徐国英,王 闯,姚希民,陈靖然
(装甲兵工程学院机械工程系,北京 100072)
0 引言
现代高速履带车辆中得益于大功率的发动机,可以达到的行驶速度越来越快,不过坦克在越野环境下的平均速度提高的却不是很多,主要是受限于坦克的悬挂装置[1-3]。而随着现在技术的不断发展,悬挂设计的方法也越来越多,虚拟仿真技术已经成为其中不可或缺的一个,对于原来求解非常复杂的问题,现在可以利用计算机顺利解决,节约了大量的人力物力,现在多提动力学软件不断涌现,其中ADAMS、LMS、SimPack和RecurDyn被广泛应用于机械、军工等领域[1-3]。笔者利用效率较高的 RecurDyn.。
1 RecurDyn软件介绍
RecurDyn软件(Recursive Dynamic)是由 FunctionBay(韩国)公司研发的新一代多体动力学仿真分析软件,首先它是吸取了ADAMS的大量优点,又在此基础上发展了自己的特点。它采用全新的运动方程理论和完全递归算法,计算极其快捷稳定,适合于求解大规模及复杂接触的多体动力学问题,尤其是接触问题和柔性多体动力学问题[2]。
传统动力学分析软件对现在普遍存在的接触碰撞问题解决的都不是很令人满意,包括过多的简化、求解效率低下、求解稳定性差等问题,难以满足工程应用的需要。而Recurdyn以远超其他以前软件的求解速度和稳定性,成功地解决了机构接触碰撞中的上述问题。所以说Recurdyn不但可以很好解决传统的运动学问题,同时也是解决工程中机构碰撞问题的能手[4-6]。
当车轮转向时,以向左转向为例,此时右侧车轮为外转向轮。机构运动如图2所示,假设液压缸位活塞杆移为y,方向向右,通过右侧拉杆推动右梯形臂转动了一个角度α。则可得出活塞杆的位移y与右转向轮转角α的关系为:

同理,活塞杆的位移y与左转向轮转角β的关系为:

2 履带车辆多体动力学模型建立
2.1 目标函数
选取某型坦克作为原型,建立了高速履带车辆的多体力学模型,其悬挂系统是由多个6自由度的刚体组成的机械系统,多刚体系统是指忽略系统中弹性变形,将其作为刚体来处理。定义广义坐标如下:

约束个数为m,其约束形式如式(4):

然后根据拉克朗日方程法,系统运动方程为:

对式(4)分别进行两次微分,可得方程如下:


模型的建立主要分为行动系统和车体,其中行动系统建模是其中的重点和难点。而RecurDyn软件中高速履带车辆模块中提供了大量的原件,大大方便了模型的建立,其中动力的提供是通过向主动轮后置施加驱动来实现的。
2.2 建立RecurDyn路面模型
Recurdyn软件提供了多种方法来生成路面曲线,本文使用的是Outline Geometry,生成的路面模型如图3所示。
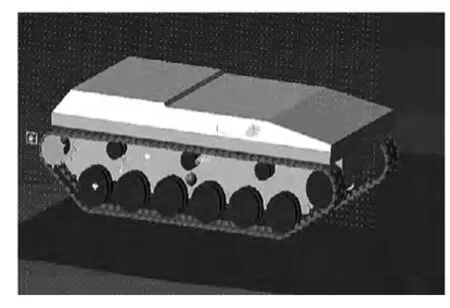
图1 车轮理论转角关系示意图
图2 车轮理论转角关系示意图
从而得到矩阵方程:
RecurDyn软件中提供了两种设置土壤模型的方法:一种是通过一般接触力来定义土壤模型,一种是基于贝克理论来定义土壤模型。其中贝克理论建立的一般是干沙软地面模型,而笔者采用一般接触力理论来建立平坦赢地面模型。
法相接触力Fn公式为:

式中:K为弹性系数;C为粘滞阻尼系数;δ·为渗透度对时间的导数;n1、n2为非线性接触力指数;n3为压痕指数。
通常在定义摩擦力时,主要根据摩擦系数与相对速度间的关系来得到。一般两者之间的关系如图3。
3 模型验证
为了验证模型的可靠性,要进行实车试验进行验证,其验证结果应该与仿真分析结果一致。本文根据GJB59.15-88《装甲车辆试验规程—野外振动试验》进行了实施道路试验,通过测量振动加速度得到其曲线和加速度PSD曲线,和相同工况下仿真结果进行比较。
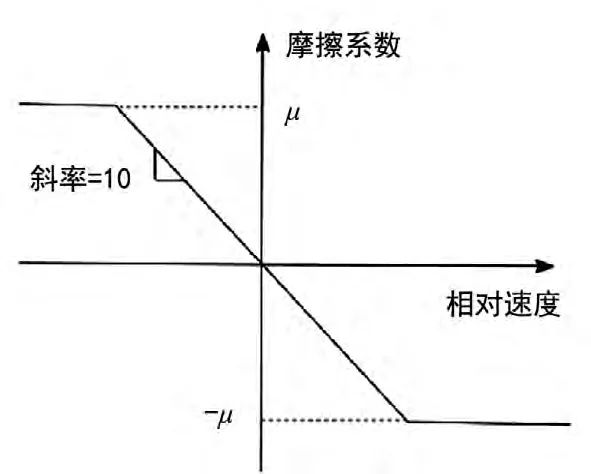
图3 相对速度和摩擦系数间关系
通过分析知高速履带车辆振动主要来自三个方面,①由于地面不平而引起的振动,其频率范围为0~150 Hz,这也是振动的主要来源;②发动机产生的高频振动;③车辆在运动过程中各个零件不可避免发生碰撞,其中产生的振动。而频率过大对人影响不大,所以主要考虑0~80 Hz的频率,且车辆各个部件的加速度不会过大,所以实验中悬着低频响应、量程小、灵敏度高的加速度传感器。
3.1 履带车辆实车验证
为了保证实验的结果,对试验仪器有一定的要求,仪器的性能要稳定可靠,因为车辆行驶的速度快,并且仪器的性能要有较强抗的干扰能力。为了节约成本选择可满足条件的单项加速度传感器(量程为100 g,灵敏度为50 MV/g),为了便于实验,选择使用WS-5926型便携数据采集记录仪。
3.2 动力学模型试验验证
为了验证建立车辆模型的准确性,对该型履带车辆进行直线行驶测试,场地选取与B级随机路面十分接近的高速跑道。其天气情况良好,驾驶员的身体与精神也良好。
试验中,驾驶员需要驾驶高速履带车辆分别以1、2、3、4四个不同的档位在指定的高速跑道上进行行驶,每一个档位驾驶员都需要把油门踩到底,以便于保证车速的稳定,方便与测量。安装在车体扭扭力轴上方和驾驶员底座下方的加速度传感器能有效地工作,记录数据。
首先车辆以1档的速度进行行驶,行驶过后,分别记录驾驶员底座下方车体垂直加速度信号如图4,而在仿真模拟中,驾驶员底座下方车体垂直加速度信号如图5,实车测试的振动加速度PSD曲线与仿真测试振动加速度PSD曲线图如图6、7。
可看出仿真试验与实车试验测试点位置垂直加速度时域曲线以及PSD曲线基本一致。其中对比加速度PSD曲线图,相同档位下,实车信号与仿真信号加速度值最大峰值处的频率基本一致,同理分别记录车辆以2到4档速度行驶时,其实车型号与仿真信号也大致相同,图形太多,就不一一列举了。
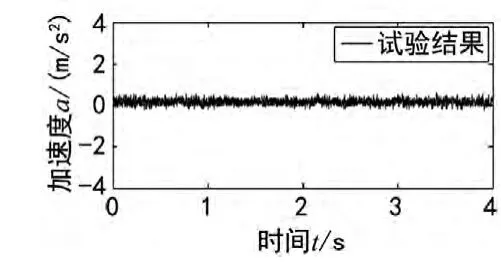
图4 实车试验1档测试点位置垂直加速度时域曲线
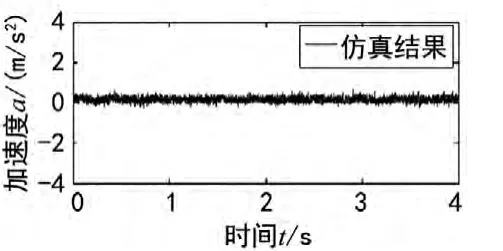
图5 仿真试验1档测试点位置垂直加速度时域曲线
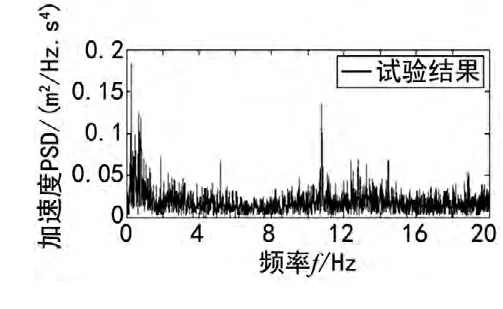
图6 实车试验1档测试点位置垂直加速度PSD曲线
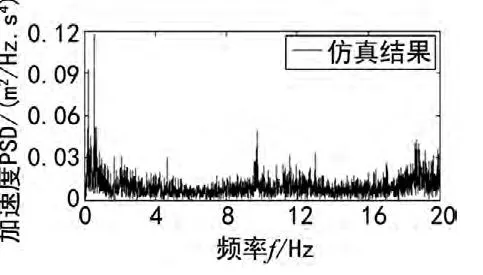
图7 仿真试验1档测试点位置垂直加速度PSD曲线
将实车试验与仿真试验相应车体位置处的垂直加速度均方根值进行对比分析,分析结果如表1。
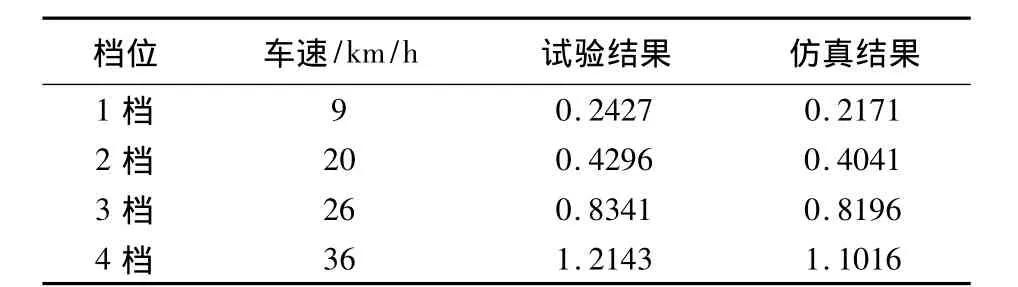
表1 垂直加速度均方根值对比 /(m/s2)
表1中,对比测试位置处垂直加速度均方根值,实车试验得出结果与仿真分析得出的结果基本一致,进一步证明了模型的准确性,同时也可看出随着坦克速度的提升,其加速度的均方根值也逐渐增大,坦克平顺性降低。
4 结论
(1)基于多提动力学软件recurdyn中高速履带模块,建立履带车辆的动力学模型,并在recurdyn中针对B级路面进行了动力学仿真。
(2)在基本接近B级路面的高速跑道上进行了实车实验,测量两个不同位置加速度及加速度PSD曲线,通过实车实验与仿真模拟结果的对比,得出了仿真模型的有效性和准确性。可以看出车辆速度加快,加速度的均方根值也随之变大,车辆平稳性降低。
[1] 闫清东,张连第,刘 辉.坦克构造与设计[M].北京:北京理工大学出版社,2006.
[2] 丁法乾.履带式装甲车辆悬挂系统动力学[M].北京:国防工业出版社,2004.
[3] 王良曦,王红岩.车辆动力学[M].北京:国防工业出版社,2008.
[4] 董新建.履带车辆行动部分动力学分析与仿真[D].湖南:湖南大学,2007.
[5] 李传才.履带式装甲车辆悬挂性能研究与仿真[D].山西:中北大学,2013.
[6] 尤·帕·沃尔科夫,阿·弗·巴依科夫,彼·得·巴·拉·诺夫.履带车辆的设计与计算[M].北京:北京理工大学出版社,1996.
