基于杠杆法的普锐斯混合动力驱动系统工作状态分析*
2015-06-11王梦瑶尤明福侯国强
王梦瑶,尤明福,侯国强
(天津职业技术师范大学,天津 300222)
0 引言
在人们日益关注环保的今天,普锐斯因革命性地降低了车辆的燃油消耗和尾气排放,成为了全球第一款最成功的环保车型。首先介绍了丰田第二代混合动力系统的组成和功能及普锐斯混合驱动桥的结构特点,然后运用形象直观、易于理解的杠杆法详细分析了普锐斯混合驱动系统在6种代表性工况下的驱动状态。
1 丰田第二代混合动力系统的组成及功能
丰田普锐斯是一种由发动机和电动机共同驱动的混联型混合动力汽车,它采用了丰田第二代混合动力系统THS-II,其主要是由发动机、HV蓄电池、两台电动发电机、动力分配行星组件、变频器总成等五大部分组成[1]。
该系统能够根据车辆的行驶状态灵活地在电动机和发动机两种动力源之间进行转换[2]。当车辆怠速或低负荷行驶时,该系统转换为纯电动模式(EV模式)使发动机停机仅依靠HV蓄电池为电动机提供动力,从而减少燃油消耗。当车辆正常行驶时,该系统能使发动机一直处于最佳工况,从而改善传统汽车发动机因工况变化频繁而导致的消耗燃油增多、排放恶化、升功率不稳定等不良情况,同时还能向HV蓄电池储备剩余能量。当车辆减速或制动时,该系统能使发动机停机同时利用车轮此时的转动反向驱动电动发电机产生电能向HV蓄电池充电从而达到回收能量的目的。因此,该系统一方面使发动机始终处于最佳工况以便于有效地应用来自汽油的能量;另一方面能够在减速和制动过程中回收能量并存储到HV蓄电池中,从而提高能量的利用率、减小尾气排放。
2 普锐斯混合驱动桥的结构特点
普锐斯混合动力系统采用P410混合驱动桥,其主要是由发动机、两台电动发电机MG1、MG2和动力分配行星组件组成,如图1所示[3]。动力分配行星组件既巧妙地将发动机和两台电动发电机连接起来又能够完成发动机与电动发电机MG1、MG2运行时的动力分配和发动机启动的功能,是系统运行的核心部分。

丰田第二代混合动力驱动桥总成结构示意图
3 利用杠杆法对动力分配行星组件的简化
由图1可知,电动发电机MG1驱动动力分配行星组件的太阳轮,发动机驱动其行星架,动力分配行星组件和电机减速行星组件共用同一齿圈。电机减速行星组件的行星架固定,电动发电机MG2驱动电机减速行星组件的太阳轮,为便于分析,可以看作电动发电机MG2经过一次减速增扭后驱动动力分配行星组件的齿圈。因此混合动力驱动桥总成各组件之间的转速关系经简化可以用一个单行星排的模拟杠杆来表示。一个单行星排由太阳轮、行星架、齿圈等三个基本构件和行星轮组成。根据单行星排的结构特点,可以将其等效成一个垂直的杠杆和3个节点,杠杆3个节点的相对位置由齿圈齿数和太阳轮齿数之比K确定[4]。如图2(a)所示,其中过节点的水平线段的长度表示构件的转速,线段相对于垂直杠杆的位置表示构件的转向,当线段位于杠杆右侧时表示构件正转,反之。
普锐斯混合动力系统采用两个电动发电机和发动机协同驱动车辆,所以动力分配行星组件中存在着双输入的情况,打破了传统自动变速器行星排中始终有一个构件被锁止的惯例。因此本文在传统杠杆法的基础上添加一些箭头来说明电动发电机MG1、MG2的充放电状态以及与发动机之间的主从动关系。箭头方向指向垂直杠杆时表示主动输入,箭头方向背向垂直杠杆时表示从动输出。电动发电机MG1、MG2主动输入时作为电动机消耗电能,从动时作为发电机产生电能。如图2(b)清楚的表示了三构件转速方向相同,且齿圈与行星架主动输入(即电动发电机MG2作为电动机和发动机共同驱动车辆),同时太阳轮被动输出(即电动发电机MG1作为发电机产生电能)。
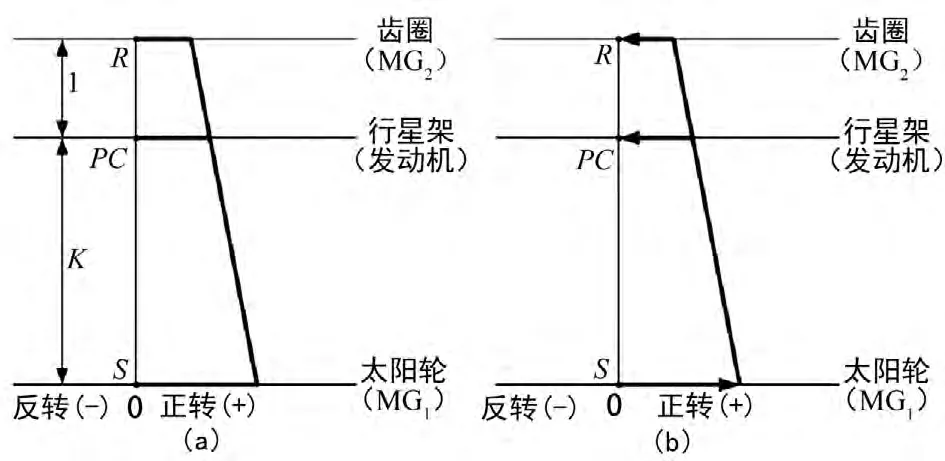
图2 混合动力驱动桥模拟杠杆图
4 普锐斯混合动力系统工作状态的分析
4.1 车辆停止发动机被启动工况
车辆停止时电动发电机MG2处于静止状态,此时发动机停机不工作。当电源控制ECU模块监测到SOC充电状态过低或电载荷过大不符合条件需要启动发动机时,电源控制ECU模块向主ECU发出信号控制电动发电机MG1运转从而启动发动机。因为电动发电机MG2处于静止状态电动发电机MG1驱动太阳轮正向旋转,所以行星架连接发动机作正向减速输出运动即发动机被启动,如图3(a)所示。在发动机被启动的期间,为防止电动发电机MG2运转,此时电动发电机MG2将接收电流以施加制动。当发动机启动完成后电动发电机MG1的驱动电流会立即被切断,此时电动发电机MG2仍然静止,发动机带动行星架输入太阳轮正向增速输出,即电动发电机MG1被驱动并作为发电机对HV蓄电池进行充电,如图3(b)所示。
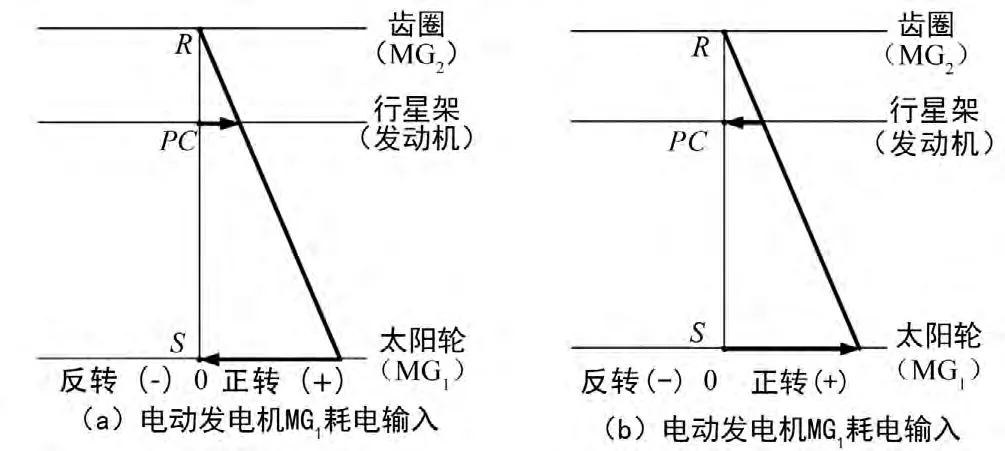
图3 车辆停止发动机被启动工况
4.2 车辆低负荷工况
车辆发动机在低负荷工况时处在高油耗、高排放污染区域,而普锐斯混合动力汽车的EV模式能够仅利用由HV蓄电池向电动发电机MG2提供的电能驱动车辆行驶。此时发动机停机不运行加速踏板开度不大,电动发电机MG1反向旋转但不发电,如图4所示。当电源控制ECU模块监测的项目与规定范围有偏差或加速踏板开度加大需要启动发动机提供更多的驱动扭矩时,主ECU便控制HV蓄电池向电动发电机MG1供电使其以较低转速正向旋转从而启动发动机,如图5所示。首先电动发电机MG1的驱动电流会使其停止转动,根据图示此时发动机已经正向旋转,车速的高低决定了电动发动机MG1正向旋转的转速大小;然后当电源控制ECU模块接收到发动机已经运转的信号后会立即切断电动发电机MG1的驱动电流,已经启动的发动机带动电动发电机MG1正向旋转从而将其转换成发电机对HV蓄电池进行充电。
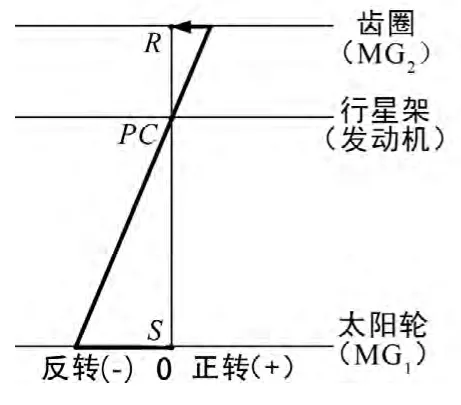
图4 车辆低负荷工况
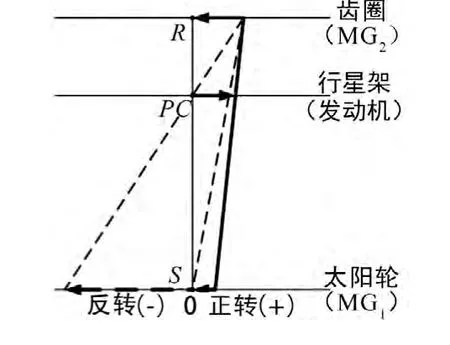
图5 车辆低负荷工况行驶中发动机被启动
4.3 车辆正常行驶工况
车辆在正常行驶状态时,发动机和电动发电机MG2一同驱动。此时发动机能够在最佳工况下运转,一部分动力直接输出到驱动车轮,剩余的动力带动电动发电机MG1作为发电机发电,通过变频器总成一系列的调整和转换电能驱动电动发电机MG2从而输出动力[5],如图6所示。当HV蓄电池的电量少时,发动机输出功率会被提高带动电动发电机MG1加大发电量向HV蓄电池充电。当车辆由正常行驶状态进入巡航状态时,电动发电机MG1的转速可以有所下降,这样发动机可以在较低的经济转速下工作从而提高了车辆的经济性,如图6中虚线所示。
4.4 车辆大负荷行驶工况
如图7所示,系统将在车辆正常行驶工况的控制基础上额外增加HV蓄电池的电力。在车辆的这种使用状态下发动机转数升高是车辆的主要动力来源,同时电动发电机MG1和电动发电机MG2的转速也将增加。此时电动发电机MG1在增速状态下发电量增大,电动发电机MG2消耗的电量也会增大其能量消耗加剧的结果还是加大了发动机的负荷。对于混合动力车辆来说,在这种状态运转车辆的油耗是最大的并不是混合动力汽车的优势所在。

图6 车辆正常行驶工况
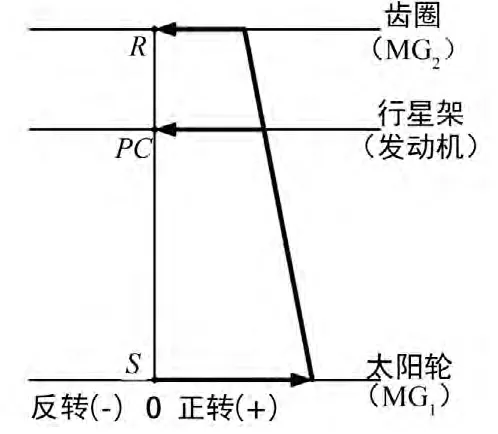
图7 车辆大负荷行驶工况
4.5 车辆制动减速行驶工况
当车辆以D挡位减速行驶时,车轮将驱动电动发电机MG2作为发电机向HV蓄电池充电,车速越高发电量越大。当车辆从较低速度开始减速时,发动机停止工作动力为零,电动发电机MG1反向增速旋转但不发电;当车辆从较高速度开始减速时,发动机将会以预定转速继续运转防止太阳轮转速过高从而保护行星齿轮组件,如图8所示,其中虚线表示车速较高时若发动机停止工作各部件的转速状态。
4.6 车辆倒车行驶工况
车辆倒车时,若SOC充电状态正常,发动机将停机仅由HV蓄电池驱动电动发电机MG2反向转动为车辆提供动力,同时带动电动发电机MG1正向增速旋转但并不对外发电否则电动发电机MG2就受到很大的负载从而加剧HV蓄电池能量的消耗这样并不划算。若电源控制模块监测的任何项目与规定值有偏差,电动发电机MG1将从正向增速的空转状态提高转速转变为驱动状态进而启动发动机,如图9虚线所示。发动机启动后电动发电机MG1的驱动电流立即被切断转变为发电状态,由于齿圈处于反向旋转状态,因此发动机的转速不用很高就可以带动电动发电机MG1作为发电机以正向高转速向HV蓄电池充电。

图8 车辆在D档位减速工况
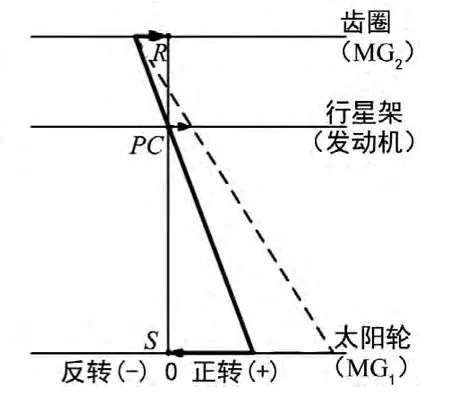
图9 车辆倒车行驶工况
5 总结
杠杆分析法是分析行星齿轮的最简单有效的方法,通过此方法详细分析了丰田普锐斯在6种代表工况下的动力分配行星组件各部件之间的转速以及主从动关系,并且清楚的表示出发动机和电动发电机MG1、MG2的工作状态,从而更有效的帮助我们理解丰田普锐斯的工作原理。
[1] 涂超群,马丽琼.透视丰田第二代普锐斯混合动力汽车技术[J].装备制造技术,2010(2):141 -142.
[2] 高惠民.丰田普锐斯电机及驱动控制系统解析[J].汽车新技术,2009:28-31.
[3] 徐礼财.丰田普锐斯油电混合动力系统概述[J].汽车与配件,2006(25):36-37.
[4] 尤明福,李志伟,甘 伟,等.基于杠杆法的8速自动变速器传动方案的设计[J].中国机械工程,2012(12):2801-2804.
[5] 曹振华.混合动力汽车原理与维修技术[M].北京:电子工业出版社,2014.
