基于变延时自换向保护的大型磁力矩器控制电路设计
2015-06-09徐勤超
徐勤超
(北京控制工程研究所,北京 100190)
基于变延时自换向保护的大型磁力矩器控制电路设计
徐勤超
(北京控制工程研究所,北京 100190)
大型磁力矩器工作时需要较大的驱动电压和电流,并且换向时会产生较大的反电动势.设计一种基于变延时自换向保护的大型磁力矩器控制电路,换向检测电路生成换向检测信号,利用驱动磁力矩器的H桥形成泻放回路,根据磁力矩器的工作状态产生不同的延时,解决磁力矩器控制信号换向时产生大反电动势的问题,提高了磁力矩器的工作效率,保证磁力矩器驱动线路安全可靠.通过Saber软件仿真验证了控制电路的正确性.
大型磁力矩器;控制电路;变延时;换向保护.
0 引 言
磁力矩器作为空间飞行器控制系统中重要的一种执行机构,由于其重量轻、可靠性高,只消耗电能等优点,广泛地应用于低中高轨道卫星[1-5].磁力矩器驱动线路用于接收计算机的控制指令,产生额定大小和方向的驱动电流,激励磁力矩器输出特定大小和方向的磁矩.大型磁力矩器具有较大额输出磁矩,主要用于大平台卫星、空间站等空间飞行器.大型磁力矩器自身具有较大的电感和电阻,并且工作时需要较高的驱动电压和较大的驱动电流.在磁力矩器电流换向瞬间会产生较大的反电动势,如果此反电动势处理不好,容易损坏控制线路.大型磁力矩器驱动线路需要解决线路功耗、反电动势等难点.采用H桥的控制方案,可以实现大磁矩磁力矩器的控制,具有功耗小,控制简单等优点[1],但是该线路的控制信号不可以直接换向.处理大型磁力矩器换向的通常做法有:(1)控制信号在换向时先置零一段时间,这种方法增加了产品的使用复杂性并存在安全隐患.(2)在驱动线路中增加一个固定最大延时的电路,此方法的缺点是无论磁力矩器工作在什么状态只要换向就要等待一个最长的时间,降低了产品的使用效率.
本文设计了一种基于变延时自换向保护的驱动线路,控制信号可以随时换向,并且可以根据磁力矩器的工作状态延时不同的时间,保证了大型磁力矩器的工作安全性和可靠性,提供了大型磁力矩器的使用效率.
1 大型磁力矩器驱动线路的组成
磁力矩器的输出磁矩与驱动电流成正比,驱动电路采用恒流控制控制磁力矩器输出磁矩.大型磁力矩器的驱动电压和电流较大,基于变延时自换向保护的大型磁力矩器驱动线路采用H桥的控制方式,为了降低驱动线路的功耗,线路工作在PWM(pulse width modulation)方式下.线路主要包括:接口电路、算法电路、PWM信号电路、H桥驱动电路、方向电路、换向检测电路、变延时电路、电流反馈电路和电流遥测电路,如图1所示.
控制信号不换向时,换向检测电路输出低电平,变延时电路不工作,驱动线路根据控制算法驱动磁力矩器输出与控制指令对应的电流.控制信号换向时,变延时电路检测磁力矩器中的电流检测信号,如果磁力矩器电流大于安全阈值时,电流方向不变,换向检测电路输出高电平,算法电路输出0信号,PWM信号电路输出0,磁力矩器通过H桥构成的泻放回路以产品的最快速度进行电流泻放,当磁力矩器电流下降到安全阈值时,变延时电路工作结束,驱动线路控制磁力矩器改变电流方向.如果磁力矩器电流小于安全阈值时,驱动线路直接控制磁力矩器改变电流方向.

图1 大型磁力矩器驱动线路结构图Fig.1 Structure of the drivinge circuit of large magnetic torquer
2 大型磁力矩器驱动线路的设计
2.1 接口电路
接口电路包括电源接口和信号接口,电源接口对电源进行滤波和隔离,保证驱动线路不受电源上扰动信号的干扰.信号接口对多路控制信号进行滤波、限幅、相加以及绝对值运算.
2.2 算法电路
算法电路实现驱动线路的控制算法,算法电路对换向信号进行检测,并根据换向信号为0或1输出2种不同的结果.当换向信号为1时,算法电路输出结果恒为0;当换向信号为0时,算法电路根据输入的数据信号和电流反馈信号根据PID控制算法,输出PID控制结果.如图2所示.
2.3 PWM信号电路
PWM信号电路通过对算法电路的输出信号与三角波进行比较生成控制H桥驱动电路的PWM信号.
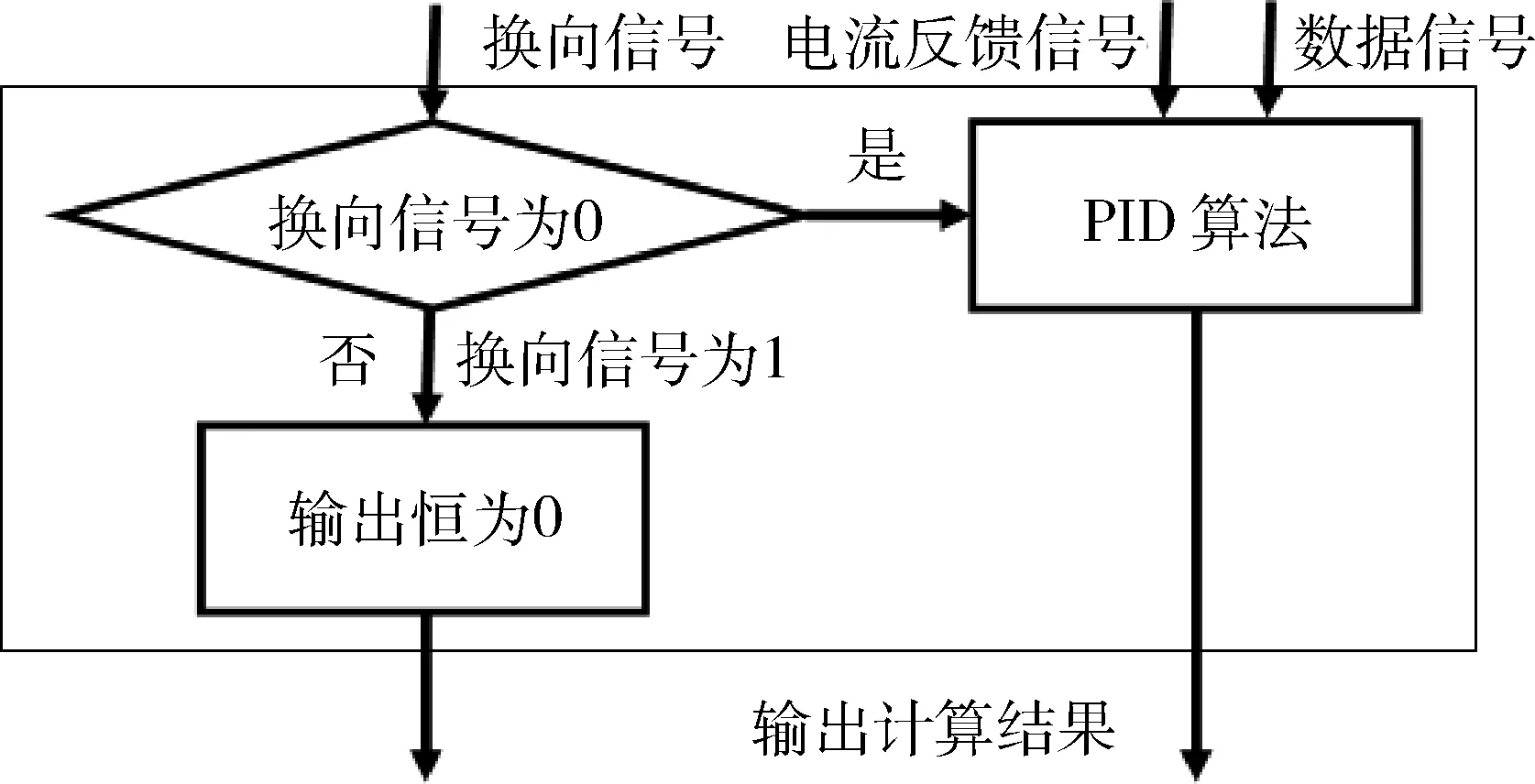
图2 算法电路示意图Fig.2 Diagram of algorithm circuit
2.4 H桥驱动电路
由于大型磁力矩器需要的驱动电压和电流较大,磁力矩器驱动线路采用MOS管构成的H桥的驱动方式.方向电路产生方向信号控制H桥不同桥臂的导通和关断,控制磁力矩器电流的方向.PWM信号电路产生的PWM信号对H桥的上桥臂进行调制控制磁力矩器电流的大小.
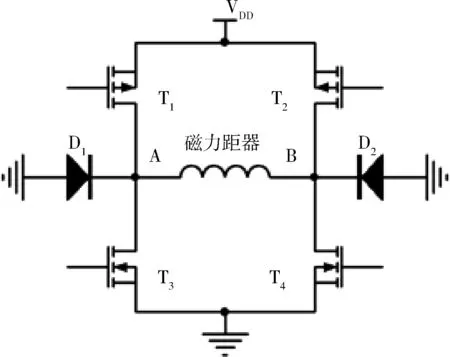
图3 H桥电路图Fig.3 Schematic of H bridge
当磁力矩器电流由A到B时,PWM信号为高时,T1和T4导通,VDD驱动磁力矩器形成VDD—T1—A—磁力矩器—B—T4—地的电流回路;PWM信号为低时,T1关断,T4由方向信号控制仍然导通,磁力矩器通过D1—A—磁力矩器—B—T4—地构成续流回路.
2.5 方向电路
方向电路利用比较器把接口电路处理过的输入信号与零电平进行比较,当控制信号大于0时,方向电路输出低电平,当控制信号小于0时,方向电路输出高电平.为了提高抗干扰能力,比较器设计成滞回比较器.
2.6 变延时电路和换向检测电路
变延时电路和换向检测电路由比较器、安全阈值设定电路、D触发器、与门、异或门组成,如图3所示.
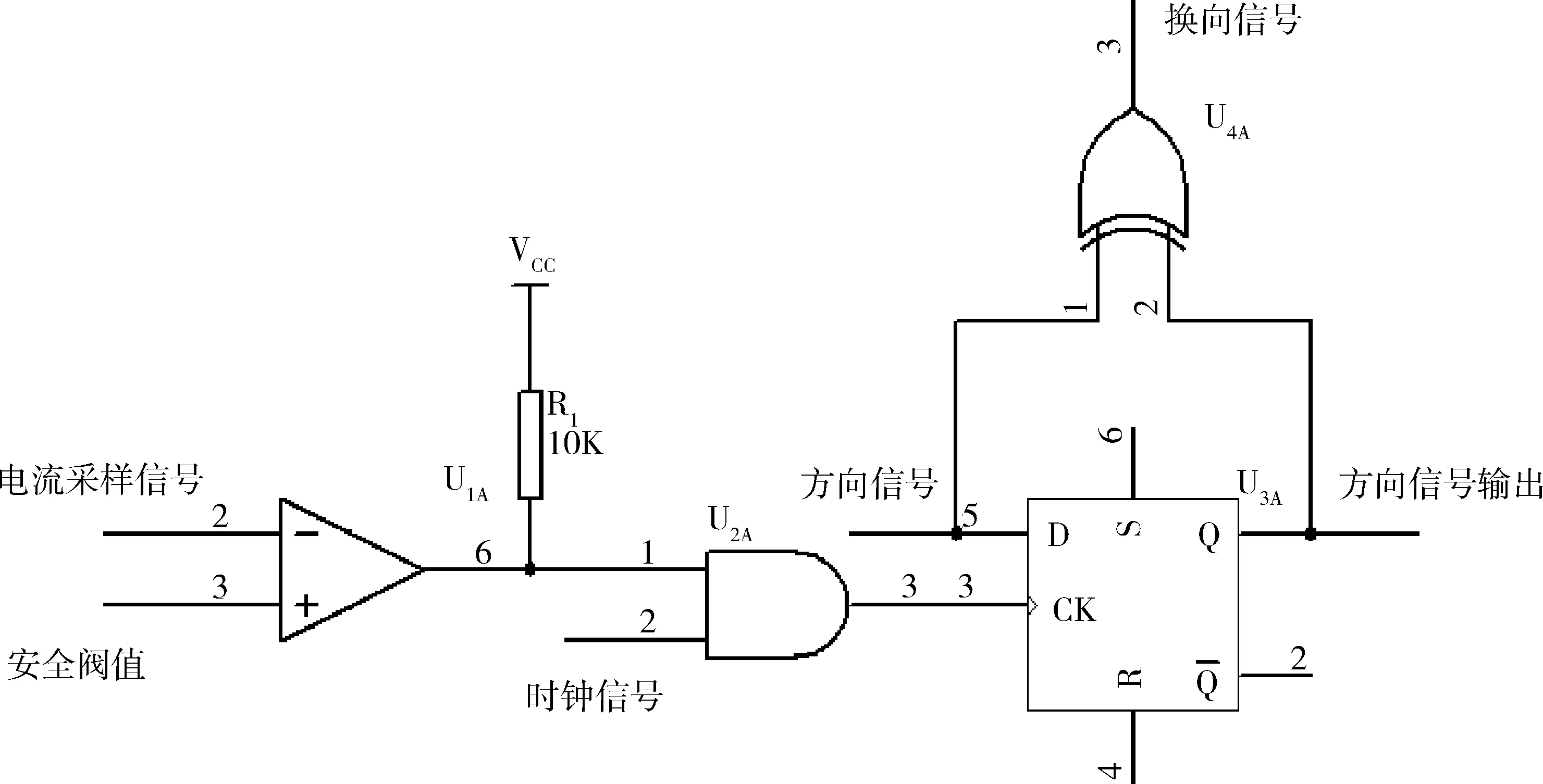
图4 变延时换向检测电路原理图Fig.4 Schematic of variable delay and reverse detection circuit
控制信号的方向发生改变时,变延时电路检测磁力矩器的工作状态,当工作电流大于安全阈值时,比较器U1A输出低电平,时钟信号与低电平相与无法输出给D触发器的CK端,方向信号无法通过D触发器,D触发器的Q输出端即方向信号输出保持不变.同时,换向检测电路U4A检测到控制信号方向发生了改变,产生高电平的换向信号输出给算法电路,算法电路输出0,PWM信号保持低电平,磁力矩器电流以磁力矩器电气特性决定的最大速度进行泻放.当电流下降到小于安全阈值时,比较器U1A输出高电平,时钟信号与高电平相与后施加到D触发器的CK端,方向信号通过D触发器输出Q端,方向信号控制H桥电路中MOS管的导通顺序,改变磁力矩器中的电流方向.换向检测电路U4A检测到D触发器的D端和Q端相同,输出低电平,变延时电路和换向检测电路工作结束.当磁力矩器中电流小于安全阈值并且控制信号方向发生变化时,比较器U1A输出高电平,方向信号可以直接通过D触发器控制磁力矩器电流反向.
2.7 电流反馈电路
电流反馈电路通过串联的采样电阻对磁力矩器中的电流进行采样,并经过滤波和比例运算输出电流信号,构成电流负反馈控制电路.
2.8 电流遥测电路
电流遥测电路将磁力矩器中的电流信号,经过采样处理转换成电压信号,输出给采集电路,检查大型磁力矩器驱动线路的工作状态.
2.9 安全阈值的选取
安全阈值的选取是电路正常工作的关键,如果安全阈值太高,不能起到保护作用,如果安全阈值选择过低则可能造成过渡时间长、正常工作时被误触发.安全阈值可以根据大型磁力矩器的电感和电流、电源电路中的滤波电容、电路响应时间以及可以允许的电源电压波动选取.安全阈值的选取原则是能量守恒原理
I2L=CU2
(1)
式中,I为安全阈值电流,L为磁力矩器电感,C为电路中的滤波电容,U为允许的电压波动.
3 仿真验证结果
Saber仿真软件是美国Synopsys公司开发的专业仿真软件,能构造基于元器件级的实际物理模型,适用于混合信号系统/电路及电源设计,是混合信号系统分析领域的工业标准,不仅能够进行顶层分析,也支持底层元器件的物理电路分析,能够模拟电路在实际应用中可能遇到的温度变化、器件参数漂移、开关损耗等多种可能的器件行为,具有强大的数模混合仿真能力[7-8].
磁力矩器仿真模型为电感10 H、电阻300 Ω,驱动电压100 V.仿真结果图5和6所示.控制信号由-5 V 直接调整为5 V后,换向检测电路输出了高电平,电流迅速下降,当磁力矩器中电流小于安全阈值时,方向信号输出跟随方向信号发生变化,换向检测信号输出低电平,磁力矩器电流实现方向变化,驱动电压上几乎没有反电动势的产生.
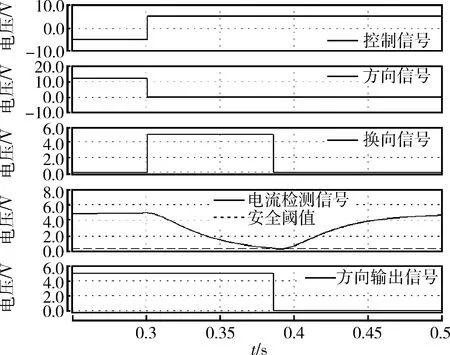
图5 控制信号换向时相应信号的变化Fig.5 Simulations of related signals when control signal reverses
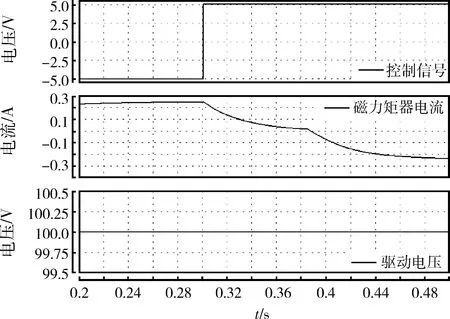
图6 控制信号换向时驱动电流与驱动电压的仿真结果Fig.6 Simulations of driving current and voltage when control signal reverses
由仿真结果可知基于变延时自换向保护的大型磁力矩器驱动线路可以满足大型磁力矩器工作时较大驱动电压和驱动电流的要求,并且保证线路控制信号方向发生变化时,磁力矩器根据当时的工作电流产生不同的延时信号,不会产生较大的反电动势,线路简单、工作可靠,可以满足大型磁力矩器控制的要求.
4 结 论
本文设计了基于变延时自换向保护的大型磁力矩器驱动电路,电路采用MOS管构成的H桥驱动电路,满足了较大驱动电压和驱动电流的需求.电路在检测到控制信号发生变化时控制磁力矩器电流下降到安全阈值内再进行换向,电路不会产生大的反电动势,解决了大磁矩磁力矩器驱动线路控制信号不能直接换向的问题.并可以根据磁力矩器的工作状态产生不同的延时时间,提高了磁力矩器的使用效率,降低了磁力矩器的使用难度.控制线路简单可靠,经过仿真验证了驱动电路的正确性和有效性.
[1] LAXNANA CHARY M, MOHANAKRISHNAN G, NAGABUSHANAM S. Optimization of magnetic torquer configuration[J]. Journal of Spacecraft Technology, 2000,10(1):34-39.
[2] MOHAMAD F M, MEHMDE M. Experimental evaluation of a magnetic torquer rod using an innovative test system[C]//The 4thInternational Conference on Experimental Mechanics. Singapore: SPIE,2010:1-8.
[3] MOHAMAD F M,MEHMDE M. Design and manufacturing of a research magnetic torquer rod[C]//Fourth International Conference on Experimental Mechanics. Singapore: SPIE, 2010:1-7.
[4] GUELMANA M, WALLERA R, SHIRYAEVA A, et al. Design and testing of magnetic controller for satellite stabilization[J]. Acta Astronautica, 2005,56:231-239.
[5] 孔庆松,赵光恒. 磁力矩器反馈控制电路设计与仿真[J]. 计算机仿真,2007,24(1):29-31. KONG Q S,ZHANG G H. Design and simulation of feedback control of magnetic torquer[J]. Computer Simulation,2007,24(1):29-31.
[6] 范佳堃,王友平,崔頳旻.大磁矩磁力矩器驱动电路的一种设计方案[J].空间控制技术与应用,2010,36(2):58-62. FAN J K,WANG Y P,CUI C M. A design method of larger-magnetic-torquer drive circuit[J]. Aerospace Control and Application,2010,36(2):58-62.
[7] 邝永变,朱剑波. 基于Saber的无刷直流电机控制系统的仿真与分析[J].电子工程设计,2014,22(10):151-155. KUANG Y B,ZHU J B. The simulation and analysis on BLDCM control system based on Saber software[J]. Electronic Design Engineering,2014,22(10):151-155.
[8] 黄辉,姜学东,邱瑞昌. 三相异步电机交流调压电路Saber仿真与控制[J]. 电力电子,2005,39(2):78-80. HUANG H,JIANG X D,QIU R C. Saber emulation and control of the three-phase induction motor in alternating current voltage regulation circuit[J]. Power Electronics, 2005,39(2):78-80.
Design of Control Circuit of a Large Magnetic Torquer with Protection of Variable Reverse-Self Delay
XU Qinchao
(BeijingInstituteofControlEngineering,Beijing100190,China)
High voltage and large current are needed by large magnetic torques (MT). High back electromotive force is generated when the current direction changes. A control circuit of large magnetic torquer with protection of variable reverse-self delay is designed. The direction check circuit produces a high level signal when the control signal reverses, then a discharging circuit is created by H-bridge. Different delay is generated according to the immediate current of the magnetic torquer. High back electromotive force is avoided, which is derived from the control signal reverse. The safety, reliability, and working efficiency are improved. The correction of the control circuit is validated by Saber simulation.
large magnetic torquer; control circuit; variable delay; reverse protection
2014-11-17
TH133
A
1674-1579(2015)03-0048-05
10.3969/j.issn.1674-1579.2015.03.010
徐勤超(1983—),男,工程师,研究方向为航天器执行机构控制.
