基于模块组合式阵列的三维漏磁检测系统
2015-06-07邱忠超张卫民杨秀江
邱忠超,张卫民,杨秀江
(北京理工大学机械与车辆学院,北京 100081)
基于模块组合式阵列的三维漏磁检测系统
邱忠超,张卫民,杨秀江
(北京理工大学机械与车辆学院,北京 100081)
为了研究阵列传感器在试件上大面积扫查检测的问题,研制了一种基于模块组合式AMR磁阻传感器阵列的三维弱磁信号检测系统。检测系统由结构相同的标准模块组成,每个模块可同时采集X、Y、Z三个方向的磁信号。对含预制裂纹的16MnR钢平板试件进行检测实验,并采集试件表面的磁信号。结果表明:可重配置式三维阵列探头对表面裂纹具有较高的灵敏度,并对亚表面裂纹具有一定的辨识能力;三维阵列探头可有效扩大检测范围,并通过对磁阵列信号成像可得到裂纹的形状及所处的位置信息。
漏磁检测;AMR;磁阻传感器;模块组合式;传感器阵列;磁成像
0 引言
漏磁检测是指利用磁源对被测材料进行局部磁化时,如果材料表面存在缺陷,则局部区域的磁导率降低,磁化场将有一部分从此区域外泄出来,形成可检测的漏磁信号,通过传感器采集表面的磁场变化来反映试件状态[1-2]。目前,随着现代工业技术的发展,对于检测技术的效率、自动化程度等要求越来越高,缺陷检测中的单点测量已经无法满足工业发展的需要。
近年来,随着电子技术的发展,电磁阵列式传感器因其检测效率高、信号丰富及便于成像显示等优点而受到广泛重视[3-4]。相比于单传感器检测,阵列式传感器满足大面积试件快速扫描的检测任务需求,且不易产生漏检[5]。
为了实现三维磁场的检测,采用磁阻传感器HMC1021和HMC1022组合构成三维磁场测量标准探头模块,并将16个标准模块组合成4×4的阵列式结构。对含不同预制裂纹宽度的16MnR钢平板试件进行检测试验,结果表明该系统能够有效检测裂纹缺陷,并研究裂纹几何参数变化对漏磁信号的影响,最后对所得磁阵列信号进行磁成像处理。
1 三维阵列漏磁检测系统设计
三维阵列漏磁检测系统与传统漏磁检测系统的主要区别是,在1个标准检测模块中放置了2个传感器,其中两轴传感器HMC1022拾取X、Y方向磁场分量,单轴传感器HMC1021拾取Z方向磁场分量。通过模块式阵列组合,使其可同时记录大面积试件表面上泄漏磁力线的三维分量。检测系统主要包括基于AMR磁阻传感器的三维阵列传感器探头、磁化装置、置位电路、放大滤波电路、采集系统及数据后置处理等,如图1所示。

图1 检测系统示意图
1.1 模块组合式传感器阵列结构设计
AMR磁阻传感器HMC1021与HMC1022采用惠斯通电桥原理检测环境磁场的变化。由于其具有灵敏度高、体积小、可靠性高、工作频率宽等特点,近年来在测量领域得到了广泛应用[6]。
为了同时测量磁场的三维分量,采用1个HMC1021和1个HMC1022组成标准检测单元模块,传感器和磁场的位置关系如图2(a)所示。将16个单元模块通过安装槽组装成4×4阵列结构,如图2(b)所示。
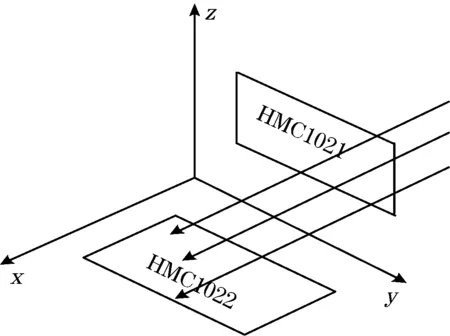
(a)传感器和磁场的位置关系
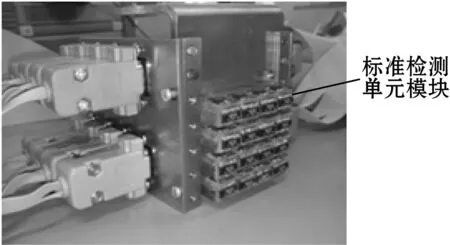
(b)阵列探头实物图图2 三维阵列探头
由于传感器阵列以标准模块方式组合,因此出现故障时可快速进行更换和维修,同时可根据检测需要对探头数量和位置进行重新调整和配置。
1.2 调理电路
为了保持HMC1021/HMC1022磁阻传感器的灵敏度[7],防止传感器被周围强磁场磁化后灵敏度降低而导致检测性能下降的情况发生,选用置位电路施加脉冲电流,通过这一瞬态的强恢复磁场来恢复或保持传感器特性。首先使用NE555芯片产生一定频率和占空比的方波,经过SN74CH04CN整形电路对方波进行整形,然后通过1个三极管功率放大电路增加电流,经过场效应管IRF7106得到脉冲消磁电路。最后,磁信号经OP4177集成运算放大器进行放大,其安装体积小、放大通道多,特别适用于阵列多路信号的放大处理。
1.3 数据采集部分
处理后的模拟信号需经A/D转换才能使计算机采集,选用UA307型A/D采集卡进行数据采集。选用面向对象的Visual C++ 6.0 编写人机交互界面,完成采集卡与计算机之间的通讯、数据的采集与整理、数据的有序存储及后续处理,如图3所示。

图3 采集处理程序界面
该程序的主要功能包括:标定选择、单点或多点采集、多通道多点采集、数据保存与显示、采集参数及显示设置等。同时,软件具有采集曲线即时显示功能,方便试验中观察检测效果,并且在底部增加了状态栏,用来指示采集过程及数据是否完成保存。
2 裂纹漏磁检测实验
选取低合金压力容器用钢16MnR钢作为试验材料,实验采用的平板试件尺寸为长400 mm、宽50 mm、厚5 mm,采用电火花加工在试件中心位置依次加工4个槽形缺陷。其中,4个槽形缺陷的长度、深度一致(长10 mm、深1 mm),宽度依次为0.08 mm、0.10 mm、0.15 mm和0.2 mm。试验前,将试件平放在磁激励台上,采用人工磁化的方式对试件进行磁场激励,如图4所示。
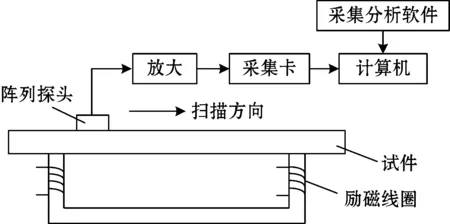
图4 励磁条件下检测示意图
试验时,首先将带裂纹一侧朝上平放在U型励磁装置上,此时相当于检测试件表面裂纹。给励磁装置通电后平板试件与励磁装置构成了励磁回路,并可通过调节电流大小来改善励磁回路中的磁场强度。然后,将三维阵列探头通过连接板安装在三维扫描台上,扫描台使用Arc1505板卡控制,经伺服系统控制伺服电机转动来控制X方向、Y方向移动。将探头与试件的提离高度固定为5 mm,由扫描台控制三维阵列探头沿试件长度方向移动,同时传感器采集三维磁信号。采集完毕后,关闭U型励磁装置电源,将试件反向放置,即试件带裂纹侧朝下平放,此时相当于检测试件距表层深度为4 mm的亚表面裂纹,重复上述步骤。
3 实验结果处理与分析
为了获得试件在矩形槽处的磁信号扫描成像图,将所得磁信号进行多尺度离散小波分析,之后对信号采用不同的小波基函数进行不同层数的分解,最后对低频信号进行重构[8],具体过程如图5所示。

图5 多尺度离散小波分析流程图
分析检测结果发现,尽管不同裂纹缺陷尺寸下漏磁信号的幅值不同,但基本呈现相同的变化规律,以宽度为0.08 mm的裂纹检测数据进行分析。由于硬件系统没有低通滤波环节,因此初始信号由于脉冲消磁/置位信号作用,毛刺较多,采用软件滤波方法消除。可以看出,通过12层的小波滤波后,能够有效去除信号中存在的高频干扰,得到裂纹缺陷引起的磁场变化波形。
在励磁情况下,当三维阵列探头扫描过裂纹缺陷时,磁场沿Z方向具有1个波峰与1个波谷。图6为裂纹宽度为0.08 mm时Z方向的磁信号分布,其中,图6(a)为裂纹缺陷正面检测信号图,图6(b)为裂纹缺陷背面检测信号图。
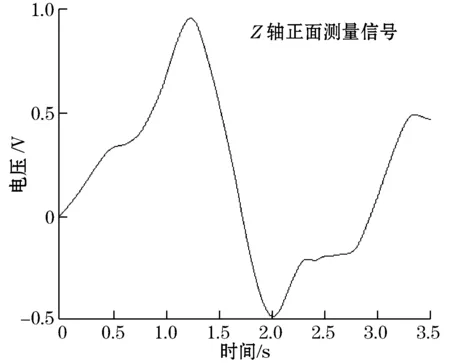
(a)正面
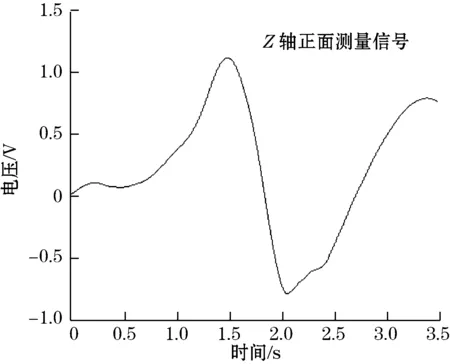
(b)背面图6 Z方向裂纹缺陷信号分布图
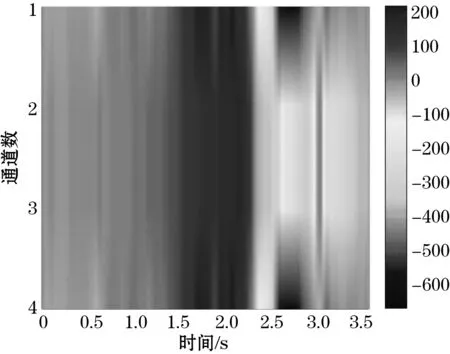
根据漏磁检测理论,Z方向的缺陷漏磁信号为信号正峰值和副峰值相间的形态,而缺陷位置对应于两峰值中间的位置,直接利用Z方向漏磁信号成像,如图7(a)所示。

(a)磁场分布图
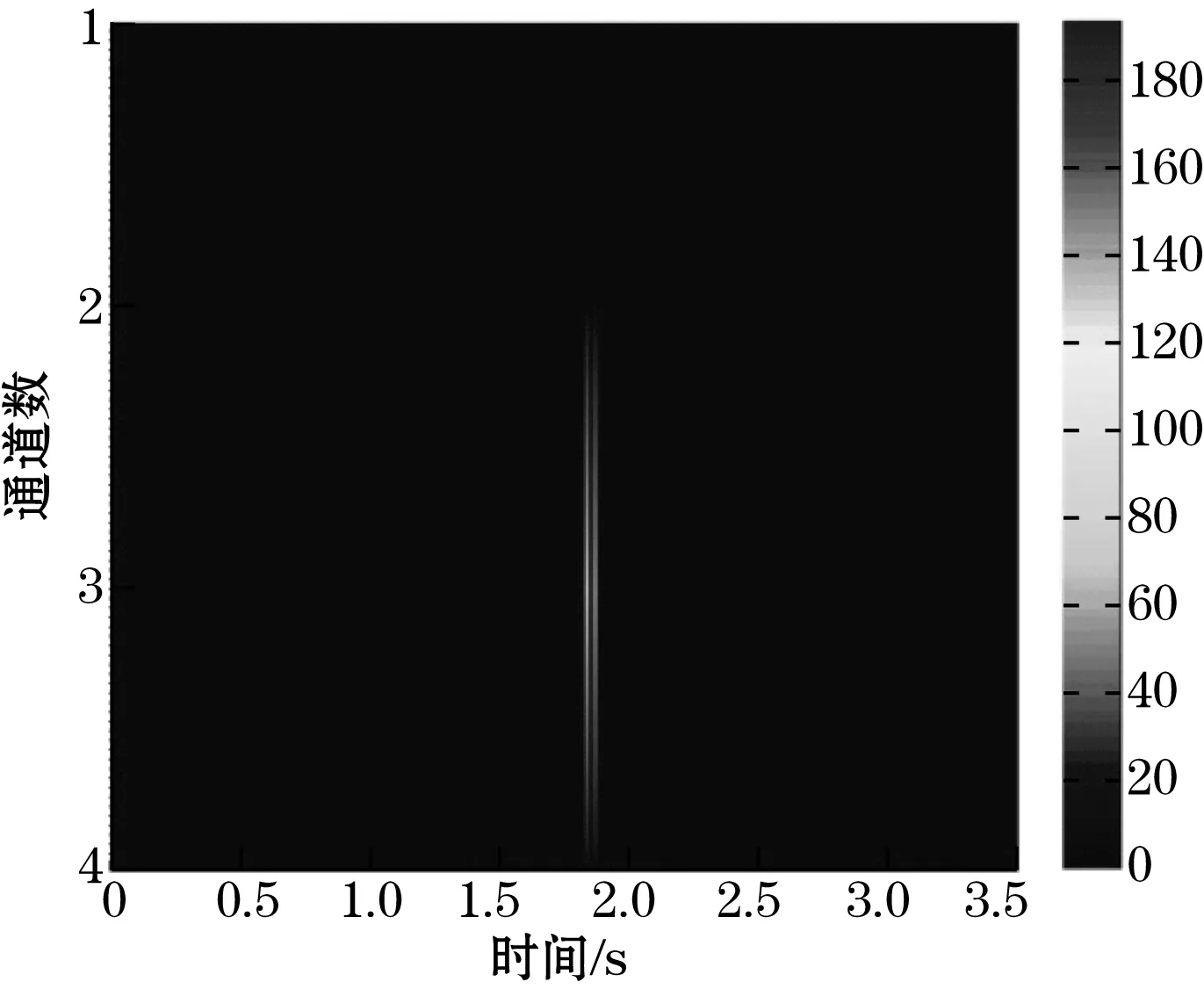
(b)阈值处理后梯度图图7 试件背面Z方向漏磁成像图
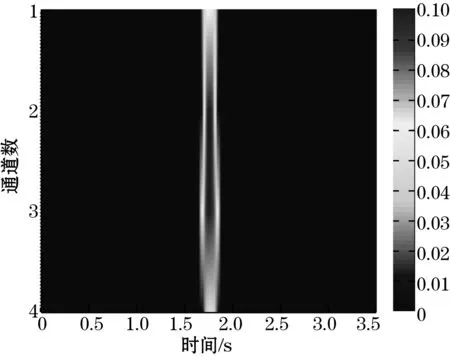
如图7(a)所示,缺陷位置不够直观,成像效果不合乎人眼观察习惯。为此,对Z方向漏磁信号做梯度运算处理。由于检测信号很微弱,为了尽量剔除干扰信号影响,设定一定阈值,只允许缺陷信号较大峰值通过,之后进行放大处理,即可得到背景干净的漏磁信号图像,成像结果如图7(b)所示,梯度信号如图8所示。
X、Y方向信号成像比较符合人眼习惯,一般无需做特殊处理,但本文例中缺陷漏磁信号太微弱,为了有效剔除噪声影响,也进行了与处理Z向信号类似的信号处理步骤,试件正面0.08 mm宽裂纹的磁信号分布与成像图如图9、图10、图11所示,试件背面裂纹信号太微弱,无法有效检出,考虑到裂纹走向,只选择灵敏度较高的Y方向成像。
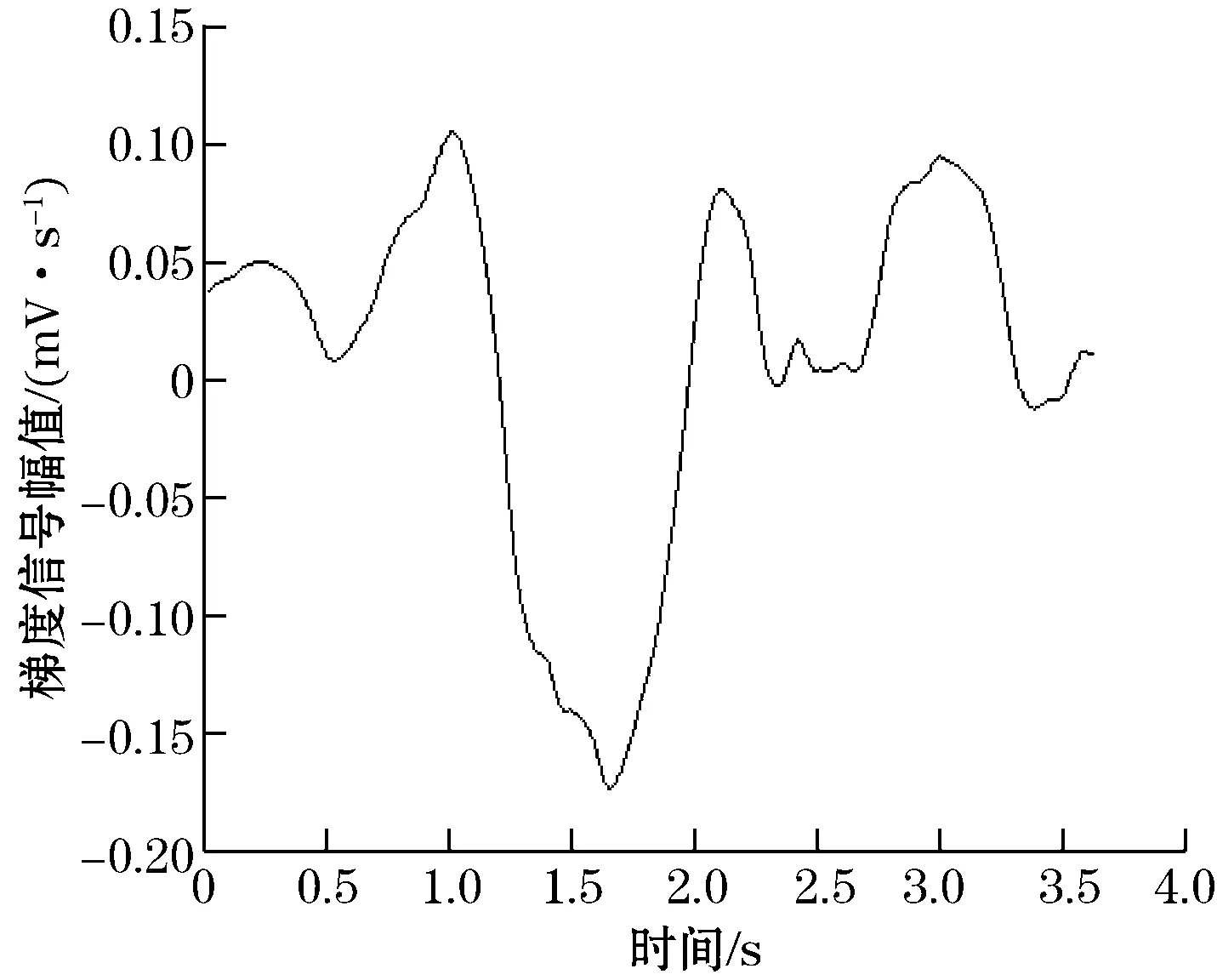
(a)正面
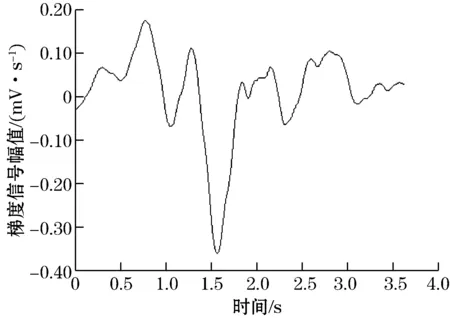
(b)背面图8 Z方向裂纹信号梯度波形图

图9 试件正面Y方向信号分布图
由上述实例可以看出,该检测系统不但能够有效判断试件表面微小裂纹的存在,而且对亚表面微小裂纹也有较高的识别能力。
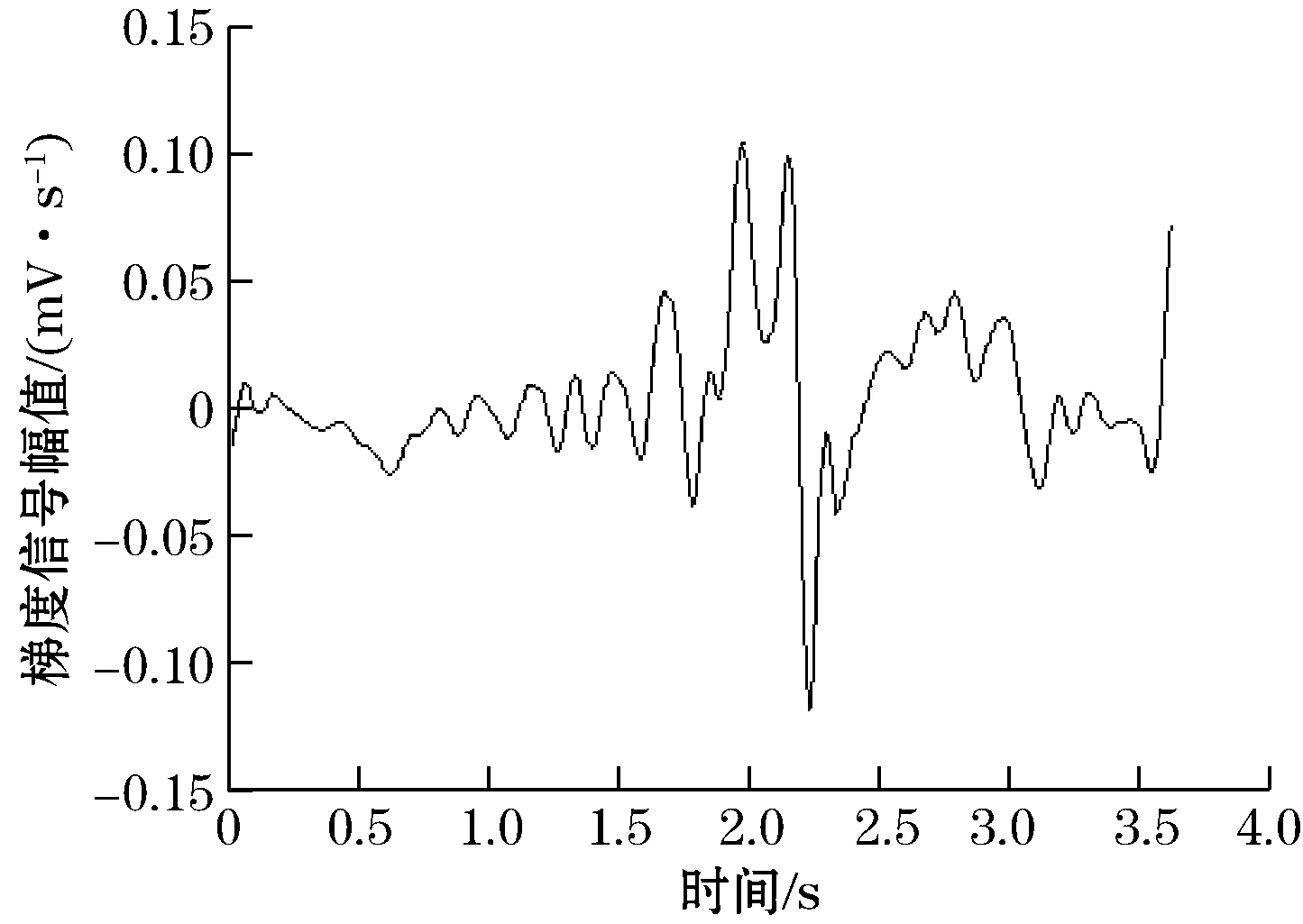
图10 试件正面Y方向磁信号梯度图
(a)磁场分布图
(b)阈值处理后梯度图图11 试件正面Y方向漏磁成像图
4 结论
(1)研制了一种基于AMR磁阻传感器的漏磁检测三维阵列探头,该探头可同时采集试件表面上的三维磁场信号,并且可根据工程需要对探头结构进行重新配置。
(2)该系统不仅能检测表面缺陷,还能检测亚表面缺陷。但值得指出的是,这种漏磁成像方法仅能对缺陷实现定性检测,缺陷图像尺寸和缺陷尺寸之间,还没有明确的定量对应关系;关于利用本设备进行缺陷尺寸定量化研究,还有待于后续深入研究。
(3)Z方向信号和X或Y方向信号相比,必须经过信号二次处理,才能形成符合人眼辨识习惯的图像,但是Z方向信号比X或Y方向信号对缺陷反映更灵敏,以0.08 mm宽的微裂纹为例,亚表面裂纹信息Z方向可以检出,Y方向则不能。
[1] 任吉林,林俊明.电磁无损检测.北京:科学出版社,2008.
[2] 杨理践,王玉梅,冯海英.智能化管道漏磁检测装置的研究.无损检测,2002,24(3):100-102.
[3] SHEIRETOV Y,GRUNDY D,ZILBERSTEIN V,et al.MWM-array sensors for in situ monitoring of high-temperature components in power plants.IEEE Sensors Journal,2009,11(9):1527-1536.
[4] RIFE J C,MILLER M M,SHEEHAN P E,et al.Design and performance of GMR sensors for the detection of magnetic microbeads in biosensors.Sensors and Actuators A,2003,107(3):209-218.
[5] ZIMMERMANN E,VERWEERD A,GLAAS W,et al.An AMR sensor-based measurement system for magnetoelectrical resistivity tomography.Sensors,2005,5(2):233-241.
[6] 沈冬萍,缪传杰,徐欣歌,等.各向异性磁传感器在车辆检测中的应用.厦门大学学报,2009,48(6):827-829.
[7] 孔庆新,张朝晖.磁阻传感器中SET/RESET充磁电路的分析.仪器仪表学报,2005,26(8):118-119.
[8] PASTI L,WALCZAK B,MASSART D L,et al.Optimization of signal denoising in discrete wavelet transform.Chemometrics and Intelligent Laboratory Systems,1999,48(1):21-34.
[9] 张彬,杨风暴.小波分析方法及其应用.北京:国防工业出版社,2011.
[10] 张卫民,杨旭,王珏,等.基于霍尔元件阵列的缺陷漏磁检测技术研究.北京理工大学学报,2011,31(6):647-651.
3D Weak Magnetic Signals Detecting System Based on Module Combination Array
QIU Zhong-chao,ZHANG Wei-min,YANG Xiu-jiang
(School of Mechanical Engineering,Beijing Institute of Technology,Beijing 100081,China)
In order to study detection problems of the array sensor when scanning on the large area,the system based on AMR magneto-resistive sensor of module combination type was designed and produced to detect magnetic signals.The system was composed of standard modules with the same structure and each unit may pick upX,Y,Zthree-dimensional magnetic signals.The 16MnR steel specimen which contained cracks was detected by the system,collectingX,Y,Zarray magnetic signals.The results show that,the system has high sensitivity,and can recognize the surface crack in some way.The probe can also effectively expand the inspection scope.Meanwhile,the shape and position information of cracks can be obtained through imaging of the magnetic array signals.
magnetic flux leakage testing; AMR; magneto-resistive sensor;module combination ;sensor array;magnetic imaging
国家自然科学基金项目(51275048)
2014-09-27 收修改稿日期:2015-02-11
TH140.7
A
1002-1841(2015)07-0010-04
邱忠超(1987—),博士研究生,研究方向为电磁无损检测。 E-mail:448347664@163.com
