管网泄漏极性相关法定位研究
2015-06-07王清琳靳宝全
王清琳,程 珩,靳宝全
(1.太原理工大学新型传感器与智能控制教育部与山西省重点实验室,山西太原 030024;2.太原理工大学机械电子工程研究所,山西太原 030024)
管网泄漏极性相关法定位研究
王清琳1,2,程 珩1,2,靳宝全1,2
(1.太原理工大学新型传感器与智能控制教育部与山西省重点实验室,山西太原 030024;2.太原理工大学机械电子工程研究所,山西太原 030024)
针对管网泄漏定位运算量大而不易实现在线检测的问题,设计一种运算快速、实时测量的定位方法。以泄漏液体的声学特性为依据,建立测漏模型,将捕获的信号离散化后极化处理,用极性相关法计算渡越时间,从而得到漏点到测点的距离。为验证极性相关法定位的可行性与可靠性,设计声学管网测漏仪。通过实验证明极性相关法能够有效提高相关函数的运算速度,易于在微处理芯片中进行实时分析,实现了工程中管网泄漏的在线定位测量。
声学;漏点定位;在线检测;FPGA;极性相关法
0 引言
对于输水管道的泄漏检测,目前多应用负压波技术,如清华大学的王海生教授判断泄漏通过分析管道两端的负压波信号,泄漏点定位根据压力突降点出现的时延信息,但可检测的最小泄漏量为5 m2/s[1]。而采用声传感器采集管道泄漏产生的声信号比压力传感器采集负压波信号敏感,且应用时可以根据需要选择量程[2]。近年来,国内外学者对声学检测技术的研究为管道测漏带来了新的发展方向。Osama等人通过对比实验,得到不同材质管道、不同泄漏形式、不同埋设条件下泄漏声波信号的特点[3]。杨进教授建立流体在管道内的涡扰动方程,通过力和流动状态的分析,证明泄漏声信号具有随机性[4]。Muggleton通过理论分析得出了存在于液体中和管道中的两种不同波的传播特性,为提高相关检测法定位的精度提供了依据[5-6]。针对漏点,张立学者采用多声学传感器融合技术测量管网泄漏点[7];龚斌学者利用声衰减的方法进行管网漏点定位[8]。Gao Y研究管网系统中声波反射回响对延迟时间估计的影响,从而影响泄漏点的定位[9]。文玉梅教授应用盲卷积分离算法对噪声信号进行辨识,在有固定噪声干扰源的情况下对漏点进行有效定位和精确定位[10]。
这些学者用不同角度、不同算法研究提高管道泄漏的定位精度,但由于其庞大的运算量,更适用于离线的泄漏精确定位。而在工程中需要能够在线测量,结构紧凑的测试仪器。本研究为提高运算速度实现实时分析,选用极性相关法,即用异或非门和累加运算代替需要大量运算的卷积函数,建立管道测漏模型,利用FPGA(现场可编程门阵列)高速运算、高度集成的特点,在FPGA芯片中实现算法,在工程允许的误差范围内达到在线测量泄漏点,并通过硬件搭建和软件设计,研制一台结构紧凑的声学管网测漏仪进行实验验证。
1 泄漏液体声学特性
若供水管网管壁上存在漏点,由于管内水压高于管外水压,水从漏点处向外喷射,会激发管壁及周围空气的震颤产生冲击声波;漏点附近的水流由层流状态转换为湍流状态产生湍流声;漏点处形成低压区从而出现空气泡,空气泡溃破产生空泡声,引起漏孔处产生振动,形成活塞声源。声信号通过管壁及周围介质传播。泄漏声信号包含的频率成分比较丰富,频率范围宽。
用相关分析法进行管道的漏水检测,在泄漏源信号s(t)两端不同位置分别放置传感器,检测到信号x(t)和y(t)。传感器接收信号可简化为
(1)
式中n1和n2表示观察中的背景噪声。
x(t)和y(t)的相关函数Rx,y为
Rx,y=E[x(t)·y(t+τ)]=E{[s(t)+n1(t)]×[s(t+t0+τ)+n2(t)]}
n1(t)]+E[n1(t)·n2(t)]
(2)
由于泄漏声信号与背景噪声不相关,两测点处的背景噪声也不相关,所以期望值均为0则式(2)可简化为
Rx,y=E[s(t)·s(t+t0+τ)]
=Rx,y(τ-τ0)
(3)
当τ=τ0时,Rx,y取得最大值。
2 漏点定位相关法测漏原理
相关测漏仪由2个传感器、2个数据采集系统和数据处理系统组成,如图1所示。
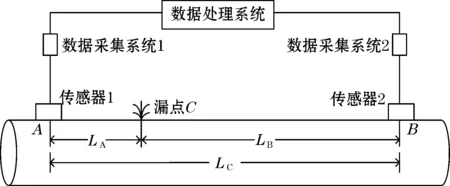
图1 相关测漏原理图
假设管壁上存在漏点C,传感器1和传感器2检测到2个信号x(t)和y(t),2个信号的相关函数为
(4)
当相关函数Rx,y达到最大值时,相关性最大,即声波从漏点C到达测点A、B的相对时延为τ=D。如图2所示。

图2 相关函数
根据声波在管道传播的速度v,和测点A、B之间的有效距离LC(若A、B间管道不是直管,则LC应为A、B间管道的实际长度),就可以得到漏点C到测点A、B之间的距离LA、LB。
式中:w为杂质元素的含量,μg/g;I1为杂质元素的11次载气空白信号值的3倍标准偏差,cps;I2为基体元素的信号值,cps;A1为杂质元素的丰度,%;A2为基体元素的丰度,%。
(5)
(6)
为了提高运算效率,将x(t)、y(t)做极化处理,得到符号函数sgn[x(t)]、sgn[y(t)]

(7)

(8)
图3为离散极性化信号函数,图曲线a为截取的一段声信号波形,曲线b为采集到的信号经过式(7)建立的比较模块得到的极性信号。

图3 离散极性化信号函数
根据式(7)、式(8)极性化的方法简化函数,得到极性相关函数Rsgn(τ)
(9)
对于工程中常见的具有高斯分布的平稳随机信号,用极性相关法得出的峰值点,与传统相关函数得到的峰值点相同。因此,求出极性相关函数Rsgn(τ),即得到声波从漏点C到达测点A、B的相对时延值,从而利用式(5)和式(6)实现漏点定位。
离散信号的极性相关函数Rsgn(t)为
(10)
在数字电路中数据处理芯片采用异或非门进行乘法运算,用计数器实现乘积的累加。逻辑电路的高电平“1”代替符号函数中的“+1”,低电平“0”代替符号函数中的“-1”。如图3所示,数据处理芯片中,将信号极化为“+1”和“-1”后记录为0,0,1,1,1,0,0,1,1,0,0,1,1,1,1,0,0,0,1,1采样值。
3 硬件架构及软件设计流程
3.1 硬件架构
为实现管网泄漏定位测量,设计声学管网测漏仪,该系统架构由两部分组成:数据采集系统和微处理器系统。如图4所示。数据采集系统通过传声器,将漏点引起的声信号转换为电压信号,放大器将传声器输出的微弱电压信号放大至适合A/D采集电路的电压范围,经过滤波器去除高频噪声信号,通过A/D转换最终将声信号转换为数字信号。微处理器系统分别采用单片机与FPGA作为中央控制模块与数据处理模块,实现主控制功能、数据处理及存储、人机交互和通讯等功能。由于FPGA内部没有存储单元,系统代码需存放到FLASH中,系统的运行及数据的高速处理需加载到SDRAM中。电源控制模块为仪器中的集成电路、微处理电路等供电。外围接口模块使仪器可与PC机相连,或储存采集到的数据,用以配合PC机进行进一步精确定位及历史数据的保存。系统硬件选型如表1所示。

图4 系统架构示意图

编号名称型号1单片机SiliconC8051F0402FPGAAlteraCycloneIVEP4CE153FLASHM25P644SDRAMH57V2562GTR5传声器AWA14421
3.2 软件设计流程
图5为声学管网测漏仪的软件设计流程图。其中Rn为A/D采集的数值;Rsgn为Rn的值极化后存入FPGA中的高低电平值;Rtemp是Rsgn的可逆累加和;Rmax为Rtemp中的最大值;τ是取得最大值时所对应的时间;Addr为数值占用寄存器所对应的地址。
由于检测的管道材质不同,声信号在各种材质管道中传播的速度不同。可以手动设置n值,为测量选择合适的量程。
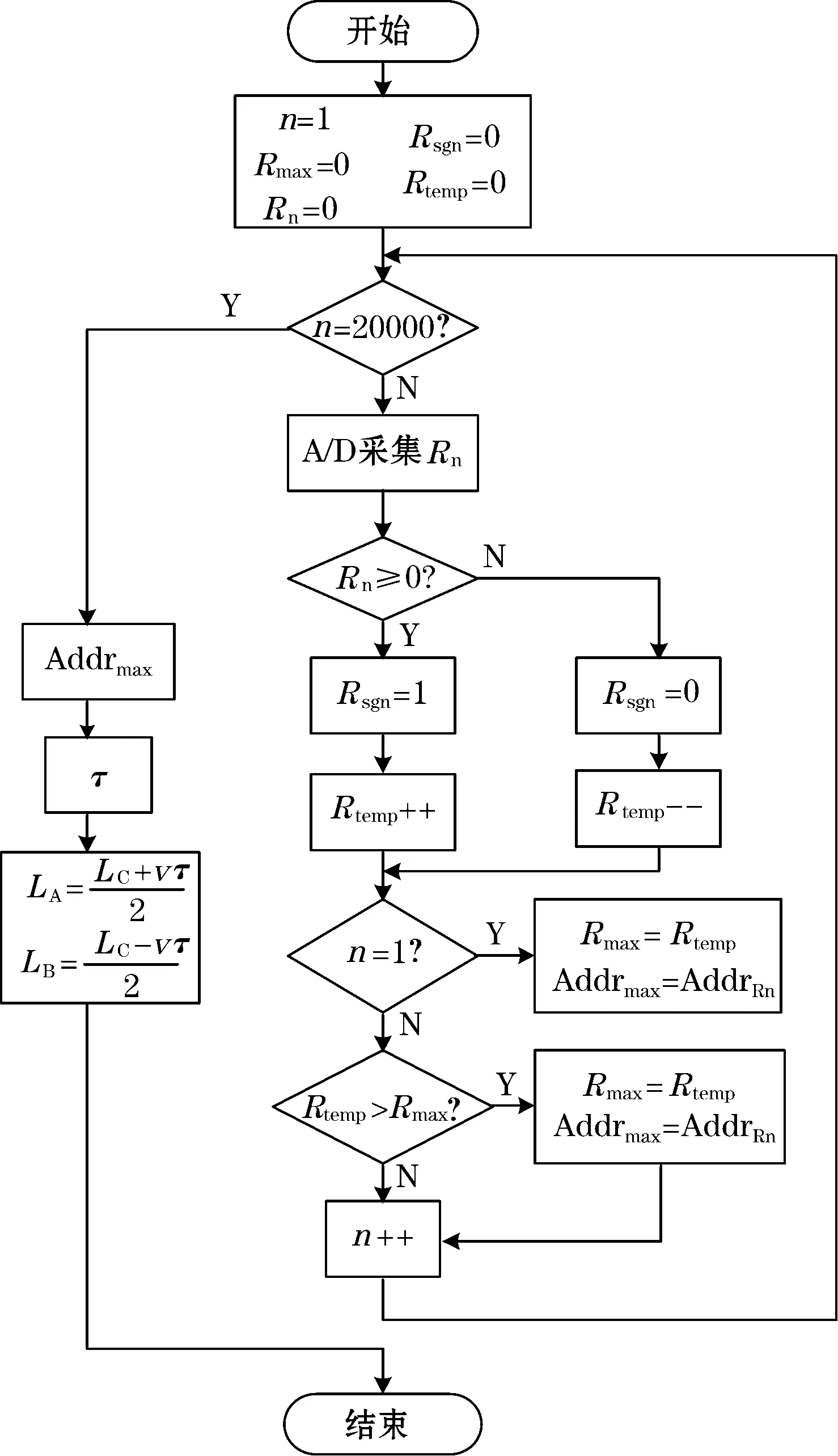
图5 软件设计流程图
4 实验研究
4.1 实验方案设计
为进行声学管网测漏实验,需制定实验设计方案。选取一段直输水钢管,如图1中,在相距LC的A、B两位置分别安放两传感器。在A处敲击管道,测漏仪显示两传感器收到信号的时间差为t0,多次测量取平均值,得到声波在这段钢管传播速度v=LC/t0。拧开C点处的出水口,待水流平稳后开始采集数据。
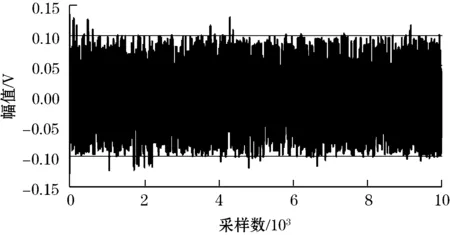
(a)
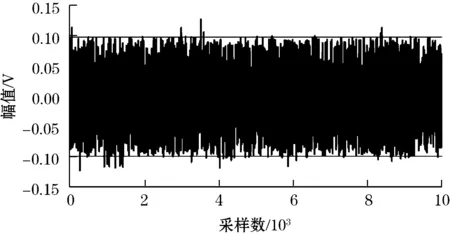
(b)图6 两组泄漏信号时域波形
图6(a)与图6(b)分别为两传感器采到的泄漏信号去除直流分量后的时域波形。分别截取图6(a)、图6(b)中的一段数据以便观察两组信号中的时延信息,如图7所示。根据式(7)和式(8)分别对两组信号进行二值极化处理,得到如图8所示的函数图形。在图8中进行式(10)的运算过程,两组数据两路信号极性一致时,式(10)中乘积为正,信号极性相反时,乘积为负。乘积为正的时间和乘积为负的时间之差即为时延t所对应的相关函数值Rsgn(t)。
从某一时刻开始计数,赋初始值Rsgn(t)=0。每一时刻比较两路信号,若两路信号极性一致时,Rsgn(t)值加1,两路信号极性相反,Rsgn(t)值减1。比较得出Rsgn(t)最大值,并将最大值对应的地址存入寄存器。由Rsgn(t)的最大值对应的地址得到渡越时间τ,即可根据式(5)、(6)得到漏点到测点的距离。
4.2 实验验证
为了验证方案的可行性,选取一段有出水阀门的铸铁直管道进行实验。在实验前测得声信号在这段管道中的传播速度为v=3 940 m/s。在距出水阀门不同位置安装传感器1和传感器2,打开出水阀门,待水流平稳后开始采集数据,实验结果如表2所示(已知ΔL=|LA-LB|;实验数据计算得ΔL`=τ·v;定位的相对误差是Lr=|ΔL′-ΔL| /L)。

(a)

(b)图7 A、B两组信号的局部信号波形

图8 极性相关原理图
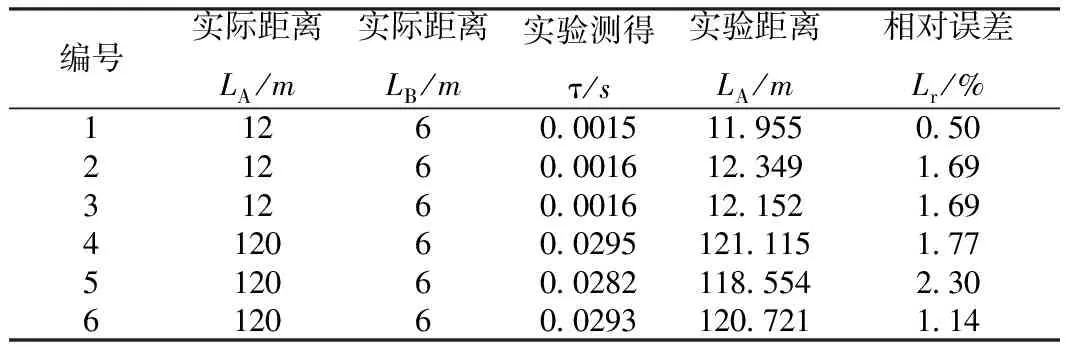
编号实际距离LA/m实际距离LB/m实验测得τ/s实验距离LA/m相对误差Lr/%112600015119550502126000161234916931260001612152169412060029512111517751206002821185542306120600293120721114
5 结束语
以泄漏液体的声学特性为依据,将声学振动信号应用于相关分析法中,用极性化的方法处理信号求得渡越时间,减少了相关法的运算量,并利用FPGA的高速采集和运算能力,提高运算速度。基于测漏模型,设计声学管网测漏仪,并通过实验进行验证。实验证明,在保证一定检测精度的同时,有效提高了运算效率,适用于微处理芯片对管网测漏进行在线分析。
[1] 王海生,叶昊,王桂增.基于小波分析的输油管道泄漏检测.信息与控制,2002,31(5):456-460.
[2] 王桂增,叶昊.流体输送管道的泄漏检测与定位.北京:清华大学出版社,2010.
[3] HUNAIDI O,CHU W T.Acoustical characteristics of leak signals in plastic water distribution pipes.Applied Acoustics,1999,58: 235-254.
[4] 杨进,文玉梅,李平.基于相关分析和近似熵的管道泄漏声信号特征提取及辨识方法.仪器仪表学报,2009,30(2):272-279.
[5] MUGGLETON J M,BRENNAN M J.Axisymmetric wave propagation in buried,fluid-filled pipes: effects of wall discontinuities.Journal of Sound and Vibration,2005,281(3-5): 849-867.
[6] MUGGLETON J M,YAN J.Wavenumber prediction and measurement of axisymmetric waves in buried fluid-filled pipes: Inclusion of shear coupling at a lubricated pipe/soil interface.Journal of Sound and Vibration,2013,332(5): 1216-1230.
[7] 张立,侯迪波,张光新,等.基于多声学传感器融合的管道泄漏检测方法研究.传感技术学报,2007,20(5):1176-1179.
[8] 龚斌,包日东,金志浩,等.压力管道泄漏点的新型声发射定位研究.化工机械,2005,32(5):36-38.
[9] GAO Y,BRENNAN M J.On the effects of reflections on time delay estimation for leak detection in buried plastic water pipes.Journal of Sound and Vibration,2009,325(3): 649-663.
[10] 文玉梅,由原,杨进,等.固定干扰源存在下的管道泄漏检测和准确定位.声学学报,2013,38(1):80-8.
Research of Leakage Detection for Pipelines Based on Polarity Correlation Algorithm
WANG Qing-lin1,2,CHENG Hang1,2,JIN Bao-quan1,2
(1.Key Lab of Advanced Transducers and Intelligent Control System,Ministry of Education and Shanxi Province,Taiyuan University of Technology Taiyuan 030024,China;2.Research Institute of Mechano-electronic Engineering,Taiyuan University of Technology Taiyuan 030024,China)
Leakage point location of pipelines needs much computation so that it is hard to implement the real-time detection.In order to solve the problem,we designed a leak detect method which can calculate fast to reduce the heavy computation and implement the on line measurement.Based on acoustic characteristics of the liquid leakage,a leak detection model was built to conduct polarization processing after discretizing the captured signal.The distance from leakage point to measuring point can be calculated by using the polarity correlation algorithm to capture the transition?time.Polarity correlation algorithm can effectively improve the arithmetic speed of correlation function and can make it easy to handle real-time analysis in micro-chips.Based on acoustics,we also designed leak detector of pipelines to verify the detecting method of polarity correlation algorithm.The experiment shows that the detector realizes the online detection of leakage pipelines with sufficient precision in engineering.
acoustics,leakage point location,real-time detection,FPGA,polarity correlation algorithm
山西省科技攻关资助项目(20140321018-02);山西省自然科学基金资助项目(2013011023-1)
2014-09-29 收修改稿日期:2015-02-10
TN911.7;TP274.2
A
1002-1841(2015)07-0094-04
王清琳(1989— ),硕士研究生,主要研究方向为机械系统动态设计与机械动力学分析。E-mail:wangqinglinlong@163.com 程珩(1956— ),教授,学士,主要研究方向为机械系统动态设计、机电系统与生产过程智能控制。E-mail:chenghang@tyut.edu.cn
