小型水下机器人ROV应用研究*
2015-06-06路晓磊马龙张丽婷孟涛马治忠
路晓磊,马龙,张丽婷,孟涛,马治忠
(国家海洋局北海海洋技术保障中心 青岛 266033)
1 引言
水下机器人是一种具有智能功能的水下潜器,根据其智能化程度和使用需求,可以将水下机器人分为4类,即:载人水下机器人(Human Occupied Vehicle,HOV)、智能水下机器人(Autonomous Underwater Vehicle,AUV)、遥控式水下机器人(Remotely Operated Vehicle,ROV)和拖曳式水下机器人(Towing Underwater Vehicle,TUV)。HOV也称载人水下潜水器,由潜水员在水下进行操控,如我国的“蛟龙”号潜水器;AUV又被称为无缆水下机器人,能够实现智能式自主航行;ROV和TUV均为带缆机器人,由母船上人工控制。
相比于深海大型潜水器,浅海小型ROV具有体积小、重量轻、使用灵活、价格经济等优点。随着人类对海洋的开发利用,ROV在海洋探索研究中发挥着越来越重要的作用。目前广泛应用于海洋环境观测、海底管道探测、水下目标探测、海洋工程监测和水下考古等方面。
2 ROV系统概述
2.1 ROV的基本构造
ROV系统主要由水上控制系统和水下作业系统两部分组成,二者之间通过脐带缆相连接。其中,水上控制系统主要包括导航定位系统、超短基线定位系统(Ultra Short Baseline,USBL)、数据采集和处理软硬件系统、ROV控制和收放系统等;水下作业系统主要包括潜航器、成像系统、作业工具和水声定位系统等[1-2]。下面着重介绍下水下作业系统。
2.1.1 潜航器
潜航器本体一般由防腐蚀性好、强度高的材料制造,能够为ROV水下设备提供安装平台和浮力。潜航器的推力来源于数套由电动马达驱动的推进器,推进器一般由推进电机、控制器和与之配合的螺旋桨组成,这些推进器可以使ROV在水中完成各种精确的运动[1]。
每一个潜航器都有一套电子控制系统,这是ROV的核心部分,由计算机和接口电路组成,是ROV的大脑。电子控制系统能够实时接收并处理水上控制系统的指令,同时将自身的状态信息和采集到的各种图像信息处理并回送,从而实现实时遥控。
2.1.2 成像系统
成像系统是浅海小型ROV搭载的重要设备之一,一般包括光学设备和声学设备两类。光学设备包括摄像机和彩色相机等;声学设备包括图像声呐、避碰声呐和双频识别声呐等。
杨译采用注释性翻译the beauty-and-talentedscholar来替代文中人物的音译,并未特别音译文中人物,在一定程度上起到了画龙点睛的作用,大量节省了译文篇幅且使译入语读者基本理解了原文欲表达的含义。
2.1.3 作业工具
根据任务目的的不同要求,ROV可以配备不同的执行机构,如机械手、海水取样器、岩心钻取器、升降式取样器、可移动采样篮、全钛取样器等[3-4]。
对于工作级ROV,通常前端都装有两个机械手,分工合作:右舷机械手为作业型机械手,自由度相对较多,一般为5~7个;左舷机械手为定位型机械手,较为简单,但臂力较大。另外,根据任务的不同,配备不同的作业工具;对于观察级等小型ROV,一般情况下只需配备功能较少的机械臂,其他小型的作业工具根据需要选配。
2.1.4 水声定位系统
用于确定潜航器和母船的相对位置,若同时装配了姿态传感器和GPS定位系统,则可以确定潜航器的绝对位置。
2.2 国内外最新研究成果
ROV最早诞生于20世纪50年代,当时几个美国人将摄像机水密起来送入海底,这就是ROV的雏形。1960年世界上第一台ROV——“CURV1”由美国海军研制成功并获得广泛关注,20世纪70年代,ROV的研发获得快速发展,一大批优秀的ROV相继出现,ROV产业开始形成。目前,在ROV制造研究方面,美国、加拿大、日本、英国、法国、德国和意大利等国处于领先地位[5-7]。
我国的ROV研发工作开始于20世纪80年代,目前,国内ROV自主研制机构主要有上海交通大学水下工程研究所、中国科学院沈阳自动化研究所、哈尔滨工程大学和中国船舶研究中心等[8]。近20年来,我国的水下机器人研究有了飞速的发展,能够制造大、中、小型各种ROV。其中,上海交通大学水下工程研究所研制的一系列ROV,如观察型ROV_JTR-11、检测型ROV_JTR-21、轻工作型ROV_JTR-31、工作型“海龙2号”ROV等,其性能指标均已接近或达到世界先进水平。
目前国内外最先进的小型ROV及其主要技术指标见表1。

表1 目前国内外最先进的小型ROV及其主要技术指标
2.3 一款小型ROV的选型与配置
在此基础上完成了其他配置:① 声学成像系统选择了Blue View二维图像声呐,视角为130°×20°,最大探测距离100 m。根据项目不同要求,可以将Blue View声呐安装在ROV的前端作为前视声呐,也可将其安装在ROV尾部,声呐方向根据需要朝上或朝下分别用来扫描海面及海底情况,并加装了浮力材料以保持ROV的平衡。②定位系统选择了法国IXSEA公司的GAPS声学定位惯性导航系统,大大提高了ROV的定位精度,可以达到0.2%×斜距。其中,水下信标安装在ROV上,GAPS换能器阵可用绳索吊于船舷,也可以用法兰盘刚性安装于船舷。
图1 加拿大Sharkmarine的Stealth2 ROV
3 应用研究
3.1 海洋环境观测
海洋科学研究需要连续、长时序的立体观测资料,当前对于水面以上的全面观测已经基本实现,但是对水下环境的观测以及认知却还存在很大的不足,因此利用水下移动观测平台开展对水体及海底环境的观测和研究必不可少。鉴于水下机器人的技术特点,可以进行定点和走航式观测,能够对水体进行剖面或断面的连续观测,突破水体对遥感观测手段的限制,获得高分辨率的海洋环境观测数据。
通过在ROV上搭载各种传感器,可以吸收目前各种不同观测手段的长处,既可以像调查船那样巡航观测,又可进入调查船以及潜水员无法进入的海域,它的作业成本和效率又远优于拖曳体,因此,它是海洋环境立体监测系统有益的补充和完善。
在军事上,利用ROV搭载水下观测仪器设备能够进行方便灵活的隐蔽观测,可以利用它对敏感海域的海底地形、噪声场、内波、声道、温跃层、密度场等与潜艇作战关系密切的环境参数进行观测,为未来战场准确提供技术支撑。而在这方面,我国还尚未利用ROV技术开展相关应用,因此,今后应进一步加大在该领域的研发与应用力度。
具体应用方面,由于国内外尚缺乏准确的水母定量监测方法,国家海洋局北海海洋技术保障中心,利用ROV结合声呐探测技术对水母的泳动姿态和速率进行了探测,以此来计算水母在剖面水体的通量,为水母监测提供了技术支撑,为水母分布数量监测方法研究提供了重要的技术研究手段。
3.2 海底管道探测
随着海洋油气开发的日益活跃,我国在渤海、东海及南海海域建设油气田呈现明显的逐年递增的趋势,作为油田开发生产重要组成部分的海底管线也越来越多,事故风险概率也将会相应提升。
截至目前,我国已建成的海底管线接近3 000 km,其中渤海11个油气田的海底管线超过200 km,东海油田群约750 km,南海铺设的海底管线已达1 900 km[9]。海底管道的铺设方式主要包括平铺在海床、挖沟不埋和挖沟浅埋等3种方式。海底管线的状态除受铺设方式的影响外,还会受复杂地形、海流冲刷、沙砾磨损管道和长期管道腐蚀等因素的影响。据统计,根据申请和施工时的海底管线使用年限,目前渤海海区有超过20条管线已经到达使用年限,截至2030年已经铺设在渤海的海底管线将几乎全部到达使用年限,存在海底管道泄漏的风险。海底管道事故不仅给海洋油气生产造成直接的经济损失,而且由于大量油气泄露还会对海洋生态环境、渔业生产及沿海居民生活产生严重的影响。
ROV能够在潜水员不能到达的深度和复杂的不安全海底环境下作业,并且在设备正常的情况下能够长时间连续作业,通过搭载光学及声学成像设备,可以对悬空、裸露的海底管道进行可视化精细探测。探测作业开始前需要对USBL和罗经进行校准,ROV入水后,通过USBL和GPS为ROV提供位置信息,深度和方位信息由ROV内置的高度计和罗经获得。到达预定地点后,利用高清数字摄像机记录海底管道的高清图像,在此过程中,前视声呐作为辅助设备为ROV的运动和避碰提供信息。
在具体应用方面,国家海洋局北海海洋技术保障中心主持的2014年海洋公益性科研专项——《海底管道探测技术集成及风险评估技术研究与示范应用》项目中,以水下机器人作为观测平台,集成前视声呐探测技术、超短基线定位技术以及溢油检测传感器技术对海底管道溢油事故进行了精细化探测,与合成孔径声呐探测技术形成了有效的补充,为海底溢油事故探测奠定了良好的工作基础。此外,为了探查蓬莱19-3油田某平台附近海域溢油点情况,2011年9月7—22日,国家海洋局北海海洋技术保障中心组织外业团队使用Stealth2型ROV对该平台附近海域进行了外业调查。经过多次探测,在距平台北侧30 m区域发现疑似油污分布区,通过水下影像分析,该区域海底多为人为清理后的痕迹,发现大量疑似油污分布的海底影像,并且尚未进行清理。从水下影像上分辨,油污有的呈颗粒状分布,有的呈块状与海底表层沉积物混合在一起(图2)。
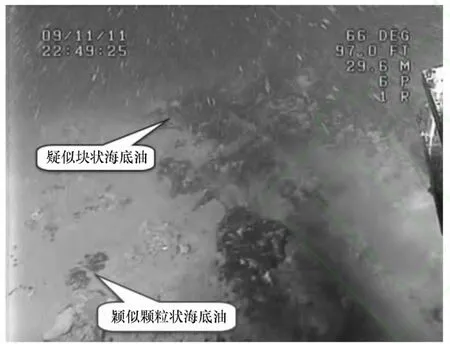
图2 ROV水下视频截图——平台北侧约30 m范围内海底油污影像
3.3 水下目标物探测
水下机器人不仅在海洋环境探测中发挥重要作用,在水下目标探测和识别中也具有独特的优势。将声呐和高清摄像机集成到水下机器人中,即可实现对水下目标的探测和识别,其中基于声图像识别目标技术可以远距离区分水雷等小目标,但由于受海洋环境、背景噪声等因素的影响,水声图像仍存在干扰大、分辨率低、像素信息少等问题。高清摄像机成像的图像清晰,但由于光在水中传播能力衰减很快,可识别的距离较近。因此,可以将两种手段相结合,实现对水下目标的声学和光学影像的探测识别。
此外,近几年发展起来的激光成像技术也比较适合ROV使用,其成像质量远高于声学成像,作用距离又比光学摄像机远,同时可以提供准确的距离信息。
针对水下未知目标物的探测,构建一个“圆环式”探测体系尤为重要,该探测体系的流程图如图3所示。其中,ROV主要应用于最后一个阶段,即目标物锁定并获取实时影像信息。

图3 水下目标物探测流程
在大范围搜索阶段,可以根据需要使用合成孔径声呐或高精度侧扫声呐、浅地层剖面仪、中浅水多波束系统和高精度磁力仪等设备搭配完成作业,在此过程中,设备的量程均设置为大量程模式,进行海底快速大面积的测量。大范围搜索完成后,根据数据信息分析确定可疑目标物的大概位置,并缩小区域进行局部详细排查,此过程可以使用合成孔径声呐或高精度侧扫声呐结合3D成像声呐系统进行作业。其中,合成孔径声呐和侧扫声呐采用小量程设置,用于精确探测海底地貌特征,3D成像声呐系统用于获取海底目标物三维声学影像信息。锁定目标物后,通过船载ADCP结合ROV进行目标物实时影像信息的获取。其中,船载ADCP用于探测作业海区的海流特征,为ROV的运动提供海流数据支持。另外,ROV通常不具备自主避碰功能,一般由操作人员应充分利用声呐和摄像机等设备提供的信息实现灵活地避碰航行。在复杂的水下环境中,ROV既要按照设计好的路径航行,又要避开高低不平、形状各异的障碍物,对搜索区域进行全覆盖,这要求操作人员必须具备丰富的操作技巧和经验。
4 结论
小型ROV机动灵活,安全高效,应用越来越广泛,特别是在海底目标物探测方面具有巨大的优势,但ROV作业成果的好坏受到很多因素的影响,如ROV基本配置、成像系统的性能、定位系统的精度、海况等。下面就小型ROV的选型、配置及应用提出以下建议。
(1)ROV的选型和配置应从实际需求和经费两方面出发,科学、合理地配置ROV的各个系统。综合考虑ROV的重量、体积、工作深度和作业海域的流速等因素,合理配置动力系统;成像系统建议配备高清摄像机等光学设备和高质量的图像声呐等声学设备;定位系统的精度和稳定性直接影响ROV作业成果,超短基线定位系统的定位精度相对较低,但价格经济,可以在要求不高的情况下使用;惯性导航系统的定位精度较高,稳定性好,但价格昂贵,可在经费充足的情况下配置。
(2)使用ROV时应充分考虑海况和海流对作业的影响,在海流较大的海域,应选择在低平潮期海流最小的时间段内作业。
(3)ROV作业团队应分工明确,统一指挥,作业过程中注意观察附近海面情况。ROV每次下水前需要仔细检查电子舱的密封性和推进器的性能,作业时要确保定位系统的支架安装牢固,非作业期间需要及时回收。
[1]桑金. 观察型水下机器人ROV系统配置研究[J]. 海洋测绘,2012,32(4):81-84.
[2]YUH J. Design and control of autonomous underwater robots:a survey[J]. Autonomous Robots,2000,8(1):7-24.
[3]晏勇,马培荪,王道炎,等. 深海ROV及其作业系统综述[J]. 机器人,2005,27(1):82-89.
[4]腾宇浩,张将,刘健,等. 水下机器人多功能作业工具包[J]. 机器人,2002,24(6):492-496.
[5]任福君,张岚,王殿君,等. 水下机器人的发展现状[J]. 佳木斯大学学报:自然科学版,2000,18(4):317-320.
[6]徐玉如,苏玉民. 关于发展智能水下机器人技术的思考[J]. 舰船科学技术,2008,30(4):17-21.
[7]桑恩方,庞永杰,卞红雨. 水下机器人技术[J]. 机器人技术与应用,2003,26(3):8-11.
[8]许竞克,王佑君,侯宝科,等.ROV的研发现状及发展趋势[J]. 四川兵工学报,2011,32(4):71-74.
[9]黄明泉.水下机器人ROV在海底管线检测中的应用 [J].海洋地质前沿,2012,28(2):52-57.
