新型12/14无轴承开关磁阻电机的设计
2015-06-05鲍军芳薛秉坤唐绍飞王惠军姚丙雷
鲍军芳, 薛秉坤, 唐绍飞, 王惠军, 姚丙雷
(1. 北京航空航天大学 仪器科学与光电工程学院,北京 100191;2. 上海电机系统节能工程技术研究中心,上海 200063)
新型12/14无轴承开关磁阻电机的设计
鲍军芳1, 薛秉坤1, 唐绍飞1, 王惠军1, 姚丙雷2
(1. 北京航空航天大学 仪器科学与光电工程学院,北京 100191;2. 上海电机系统节能工程技术研究中心,上海 200063)
为了解决传统无轴承开关磁阻电机(SRM)悬浮力和转矩之间的耦合,提出一种新型12/14结构的无轴承SRM。新型12/14结构无轴承SRM的特征是定子磁极的内径圆弧为非等间距。特殊的定子结构不仅使无轴承SRM悬浮力和转矩的解耦控制成为可能,也实现了转矩极的短磁路。针对所提出的新型12/14结构无轴承SRM,详细地介绍了悬浮极和转矩极的设计;并利用有限元分析了新型12/14结构无轴承SRM的电磁特性。最后,为了验证所提出结构的正确性,加工了一台样机,并进行相关的测试试验。
开关磁阻电机(SRM); 无轴承; 耦合; 悬浮力; 数学模型
0 引 言
开关磁阻电机(Switched Reluctance Motor, SRM)具有结构简单、成本低、调速范围广、容错能力强等优点[1-9]。与传统的机械轴承相比,磁轴承具有无摩擦、无须润滑和维护、寿命长等优点[10-12]。无轴承SRM同时具有SRM和磁轴承的双重优点,故自发展以来就受到国内外学者的广泛关注。
目前,已存在多种结构的无轴承SRM。其中,研究最多的是12/8双绕组结构无轴承SRM[13]。该电机每个定子磁极上绕制有两组绕组,用于产生悬浮力和旋转转矩。由于,悬浮力和转矩之间有很强的磁耦合,为实现稳定的悬浮,需要复杂的控制算法,故不利于高速或超高速场合的应用,尤其在高度非线性的情况下,实现解耦控制非常困难。随后提出的一些其他结构的无轴承SRM,如8/6单绕组结构无轴承SRM和莫里森型SRM等。这两种电机也未能避免悬浮力和转矩共磁路的问题。为了解决上述问题,提出两种混合定子极结构的无轴承SRM,即8/10结构[14]和12/12结构[15]无轴承SRM。但8/10结构无轴承SRM一半的定子磁极用于产生悬浮力,功率密度低。转矩极的磁通流经直径方向上的两个定子磁极闭合,转矩极和悬浮极的磁通路径有部分交叉。12/12结构无轴承SRM虽然实现了短磁路结构,但单相电机的转矩脉动较大,且结构复杂,加工、装配困难,成本高。
基于上述几种结构无轴承SRM,本文提出一种新型12/14结构无轴承SRM。针对所提出的新型电机,详细介绍了其设计方法,并利用有限元仿真分析了电机的电磁特性。根据设计的几何参数,加工了一台样机,并进行了相关的试验测试。
1 结构和基本原理
图1给出了新型12/14结构无轴承SRM的结构图和绕组分布图。由图1(a)中可知,新型12/14无轴承SRM的定子采用混合定子极结构,即定子有两种磁极。一种是用于产生悬浮力的悬浮力磁极,如图1(b)中的Pxp、Pxn、Pyp和Pyn;另外一种是用于产生旋转转矩的转矩磁极,如图1(b)中的PA1到PA4,PB1到PB4。电机正常工作时,转矩磁极PA1到PA4上的绕组串联,同时通电,构成A相,转矩磁极PB1到PB4上的绕组串联,同时通电,构成B相。


图1 新型12/14无轴承SRM
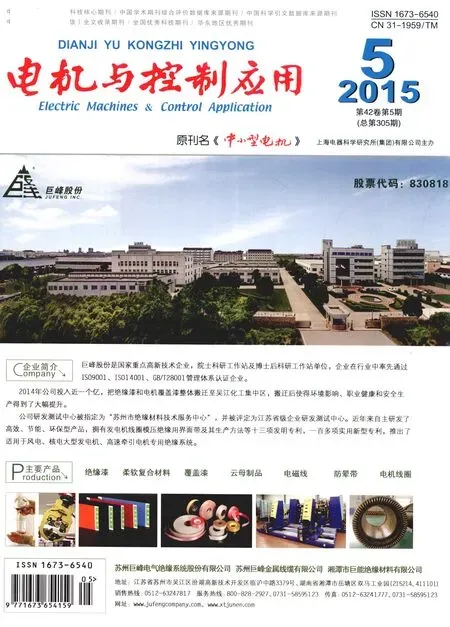
新型12/14无轴承SRM的特征是其定子磁极的内径圆弧为非等间距,如图1(b)所示。新型电机相邻的两个转矩磁极向相反的方向偏移1/2的换相角。以A相为例,与传统12/14结构SRM定子磁极的分布相比,转矩磁极PA1沿逆时针方向偏移1/2的换相角;转矩磁极PA2沿顺时针方向偏移1/2的换相角。偏移后内径非等间距的定子结构有助于实现短磁通路径。图2给出了转矩磁极PA1和PA2的上绕组的电感特性,其中的虚线表示传统12/14结构SRM电感曲线,实线表示新型12/14结构无轴承SRM的电感曲线。
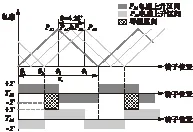
图2 相邻两转矩磁极的电感特性
如图2所示,传统12/14结构SRM磁极PA1上绕组电感曲线的上升区间是θ1到θ3,磁极PA2上绕组电感曲线的上升区间为θ2到θ4。由于正转矩只在电感上升区间产生,所以当磁极PA1和PA2上的绕组同时导通时,正转矩区只有θ2到θ3。在θ1到θ2区间,磁极PA1上的绕组产生正转矩,磁极PA2上的绕组产生负转矩。若磁极PA1和PA2上的绕组同时导通,θ1到θ2区间没有转矩输出。同理,在θ3到θ4区间,磁极PA1上的绕组产生负转矩,磁极PA2上的绕组产生正转矩。若磁极PA1和PA2上的绕组同时导通,θ3到θ4区间没有转矩输出。如果磁极PA1上绕组的电感曲线向右平移2.14°,磁极PA2上绕组的电感曲线向左平移2.14°,两条电感曲线将会重合,同时导通时,正转矩区也会延长。为了使磁极PA1和PA2上绕组电感重合,如图2中的虚线所示,新型电机两个相邻的转矩磁极向相反的方向偏移2.14°。相邻的两个转矩磁极的内径圆弧为25.72°,相邻的转矩磁极和悬浮力磁极的内径圆弧为32.14°。
2 样机设计
2.1 悬浮力推导
新型12/14结构无轴承SRM的设计过程与普通SRM有所不同,其设计过程不仅包括转矩极的设计还包括悬浮极的设计。由于转矩极结构的相似性,新型12/14无轴承SRM转矩极的设计可以参考普通SRM的设计方法。众所周知,无轴承SRM悬浮的稳定性直接影响到电机的正常工作,因此在设计新型12/14无轴承SRM时应重点考率悬浮极的设计[16]。因此,本文采用等效磁路法推导出悬浮力与电机基本尺寸的关系。悬浮极的等效磁路如图3所示。图3中,N为悬浮绕组匝数,ixp、iyn、ixn、iyp分别为+x、-y、-x、+y方向的绕组电流。
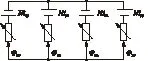
图3 悬浮极的等效磁路
根据图3所示的等效磁路可得到各方向悬浮等效磁通的关系如式(1)所示:
(1)
式中:Pxn、Pxp、Pyn、Pyp——-x,+x,-y,+y方向气隙磁导。
可由电机的基本尺寸推导,如式(2)所示。
(2)
式中:x0、y0——转子在x、y方向的偏心位移;
g0——单边气隙长度;
R——转子外径;
βs——转子极弧;
l——轴向长度;
μ0——真空磁导率。
根据式(1)可推导出各方向等效磁通的表达式如式(3)所示:
(3)
其中,P=Pxp+Pyn+Pxn+Pyp。
求得各气隙磁导后,根据电磁力的计算式(4)求得x、y方向的径向力:
(4)
图4给出计算结果和仿真结果的对比,从图4中可以看出,计算结果与仿真结果非常吻合,从而也验证了计算结果的正确性。

图4 结果对比
2.2 极弧的选择
在新型12/14无轴承SRM的设计中既要考虑转矩极又要考虑悬浮极,因此,新型12/14无轴承SRM设计时要考虑到3个极弧,即转矩极弧βst、转子极弧βs及悬浮极弧βsr。转子极弧和转矩极弧的设计可以参考普通SRM的设计方法。在普通SRM的设计过程中要获得尽可能大的电感变化范围,进而获得较大的输出转矩,就要求转子极弧和转矩极弧之和要小于一个转子极矩;此外,SRM转子极弧不小于转矩极弧。同时,为了保证在转子旋转过程中,能获得连续的旋转转矩,转矩极弧要大于电机的换相角。
在新型12/14无轴承SRM设计过程中,除了要考虑到上述条件,还应该确保在转子旋转过程中有稳定连续的悬浮力,就要求悬浮力极弧不能小于转子极矩。综合上述条件,新型12/14无轴承SRM极弧的取值范围如图5所示。

图5 极弧取值范围
图6 转矩极弧的优化
在图5所示的新型12/14无轴承SRM极弧的取值范围内,为获得更好的电机性能,本文采用了一个简单的优化算法。转矩极弧的优化如图6所示。转矩极弧的长度会影响到定子槽面积,从而影响到转矩极绕组的匝数N。如果转矩极弧减小,定子槽面积会增大,相同的条件下,转矩绕组匝数会增加,输出转矩增大。但是,如果转矩极弧太小,最大电感会减小,输出转矩将减小。因此转矩极弧存在最优值。在优化过程中,峰值电流为1A,转矩极弧为8°~12°,在整个优化过程中槽满率一直保持不变。如图6所示,随着转矩极弧的增大,绕组匝数减小,而输出转矩先增大后减小,当转矩极弧为10°时,输出转矩最大。因此,新型12/14无轴承SRM的转矩极弧选择为10°。
2.3 气隙的选择
气隙是无轴承SRM中非常重要的几何参数,直接影响输出转矩和悬浮力的大小,如式(5)所示:
(5)
式中:μ0——真空磁导率;
N——转矩绕组匝数;
θ——定转子的重叠角;
Ns——悬浮绕组匝数;
Lstk——轴向长度;
i——绕组电流。
由式(5)可知输出转矩反比于气隙长度,悬浮力反比于气隙长度的平方。因此,气隙长度增加必然会引起输出转矩和悬浮力的减小。图7给输出转矩和悬浮力随气隙的变化曲线。

图7 气隙影响
由图7可以看出,转矩和悬浮力均随着气隙长度的增加而减小,但是气隙的选择要满足机械加工的要求,因此新型12/14无轴承SRM的单边气隙选择为0.3mm。
3 电磁特性分析
根据上述分析最终得到新型12/14无轴承SRM的参数如表1所示。
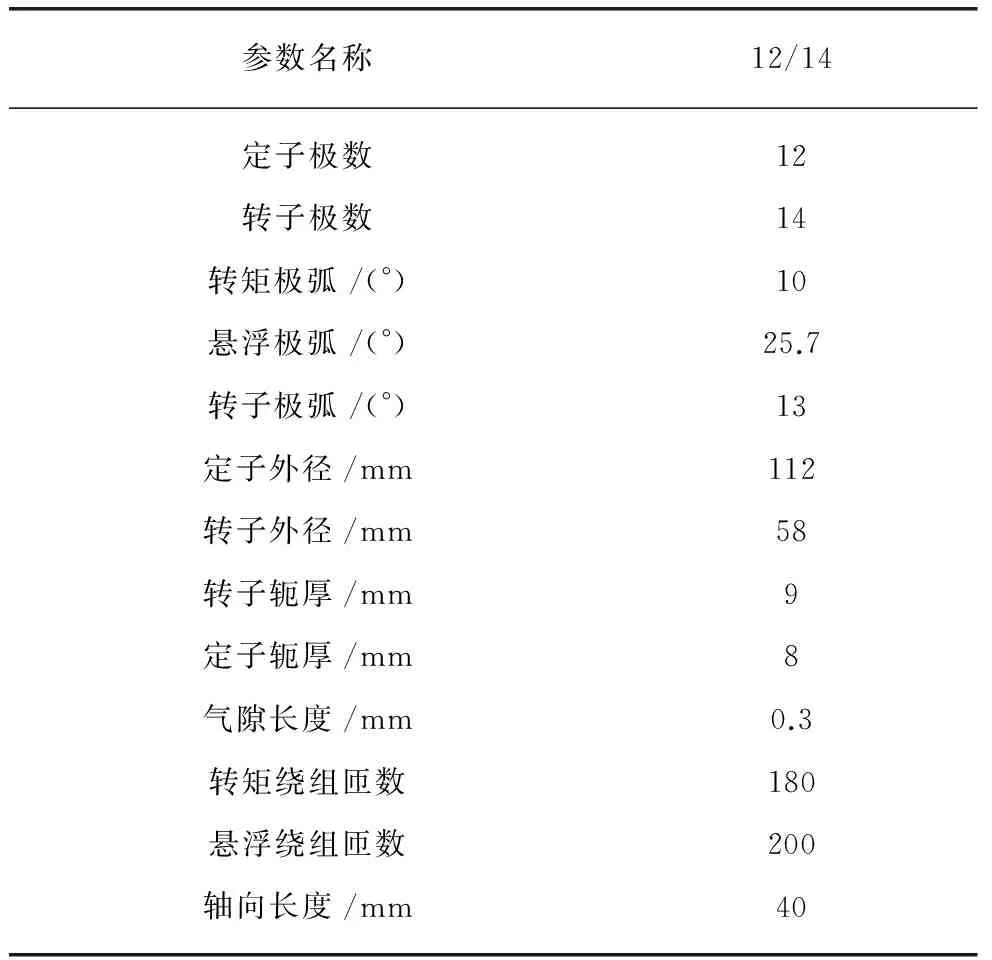
表1 样机参数
电磁特性是表征电机性能好坏的重要指标,因此,本文根据表1所示的数据,利用有限元仿真软件分析了新型12/14无轴承SRM的电磁特性。图8给出了新型样机转子处于对齐位置及不对齐位置时的磁通分布图。从图8中可以看出新型12/14无轴承SRM转矩极磁通沿两个相邻的转矩磁极闭合,磁通仅经过六分之一的转子轭圆周长度,即实现短磁路。
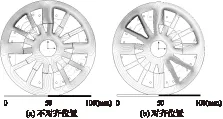
图8 磁通分布图
图9和图10分别给出了新型12/14结构无轴承SRM转矩极的电感特性和转矩特性,其中转矩绕组电流从1A增大到3A。

图9 电感特性
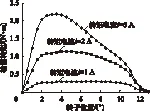
图10 转矩特性
图11给出了悬浮力的特性仿真曲线,在仿真时悬浮极采用差分控制,控制电流分别设置为-0.5°、-0.25°、0.25°、0.5°A。
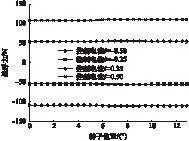
图11 悬浮力特性
4 试验结果
根据表1所示的设计参数,加工了一台样机如图12所示,并进行了相关的测试试验。试验平台如图13所示。
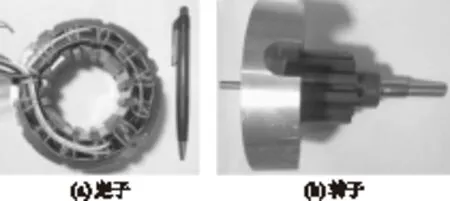
图12 样机图片
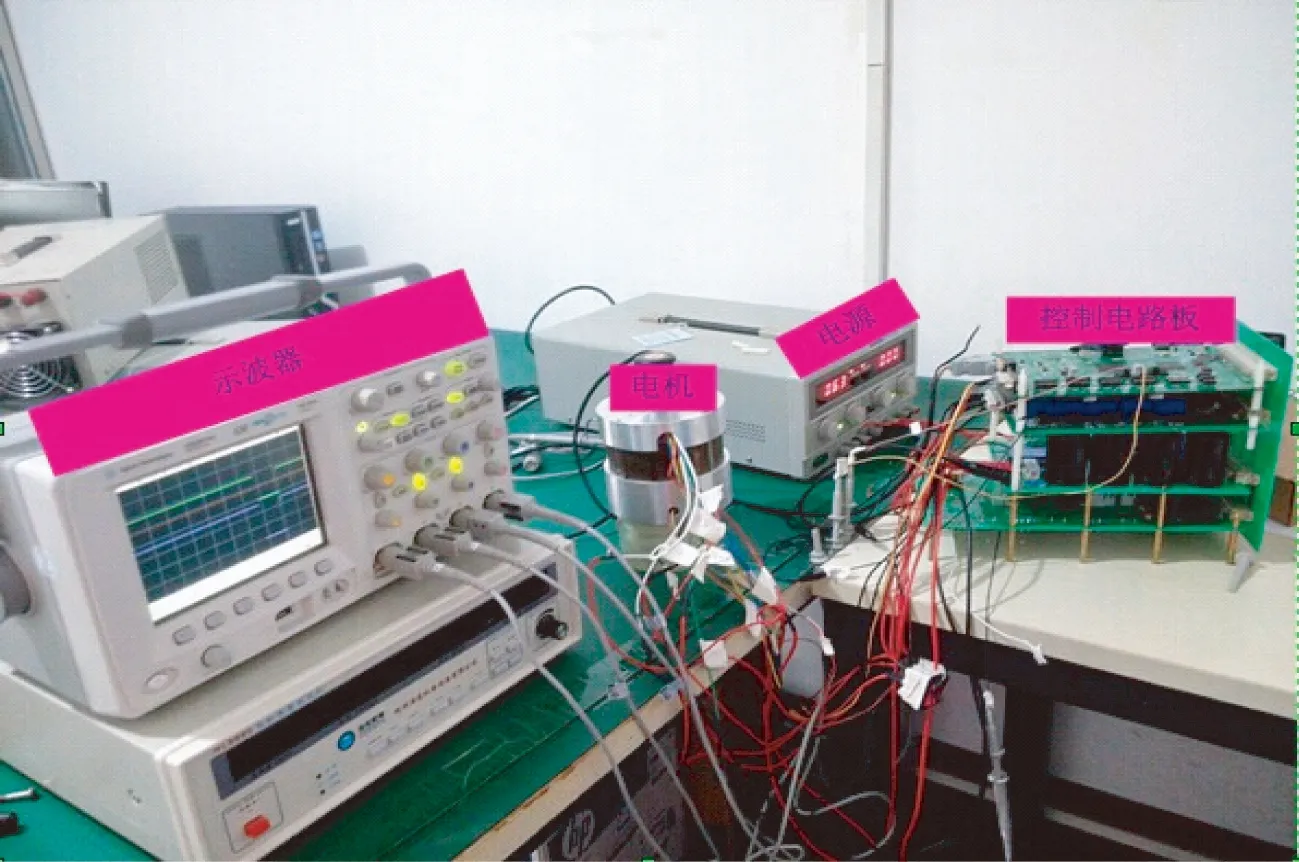
图13 试验平台
图14给出了新型12/14结构无轴承SRM两自由度静态悬浮状态下的电流波形。为了保证转子悬浮在中心位置,两个方向的参考位移为0。从图14可以看出,控制器通电后,转子移向平衡位置。

图14 悬浮电流
图15给出单自由度悬浮过程中,存在外界干扰时的电流波形和位移波形图。从图15可以看出,当存在外界干扰时,位移信号和电流信号都有波动,但很快恢复到平衡位置。

图15 抗干扰悬浮
5 结 语
本文提出一种新型12/14结构无轴承SRM。针对其特殊的定子结构,利用等效磁路法,推导出了悬浮力的数学模型,用于校正电机基本参数的设计。详细介绍新型电机极弧的选择、气隙的选择等设计过程,并利用有限元仿真分析其电磁特性。最终设计并加工了一台样机,进行了相关试验测试,从而验证了相关理论的正确性。
[1] 梅磊,范震乾,张广明,等.轴向磁通SRM参数设计方法[J].电机与控制应用,2014,41(4): 17-20.
[2] 郭晓颖,苏建中,马志国,等.电动汽车高效率SRM系统设计[J].电机与控制应用,2012,39(4): 14-16.
[3] 邓智泉,严仰光.无轴承交流电机的基本理论和研究现状[J].电工技术学报,2000,15(2): 29-35.
[4] KRISHNAN R. A novel single-switch-per-phase converter topology for four-quadrant PM brushless DC motor drive[J]. IEEE Trans Ind Appl, 1997,33(5): 1154-1161.
[5] 杨钢,邓智泉,曹鑫,等.适用于无轴承SRM的功率变换器设计[J].航空学报,2008,29(1): 110-116.
[6] 贺益康,年珩,阮秉涛.感应型无轴承电机的优化气隙磁场定向控制[J].中国电机工程学报,2004,24(6): 116-121.
[7] HASEGAWA Y, NAKAMURA K, ICHINOKURA O. A novel switched reluctance motor with the auxiliary windings and permanent magnets[J]. IEEE Trans Magn, 2012,48(11): 3855-3858.
[8] CHIBA A, FURUICHI R, AIKAWA Y,et al. Stable operation of induction-type bearingless motors under loaded conditions[J]. IEEE Trans Industry Application, 1997,33 (4): 919-924.
[9] BECERRA R C, EHSANI M, MILLER T J E. Commutation of SR motors[J].IEEE Trans Power Electron, 1993,8(1): 257-263.
[10] 赵旭升,邓智泉,王晓琳,等.永磁偏置磁轴承的研究现状及其发展[J].电工技术学报,2009,24(9): 9-20.
[11] TAKEMOTO M, CHIBA A, AKAGI H, et al. Radial force and torqueof a bearingless switched reluctance motor operating in a region of magnetic saturation[J]. IEEE Trans Ind Appl, 2004,40(1): 103-112.
[12] 范东,杨艳,邓智泉,等.无轴承开关磁阻高速电机设计中的关键问题[J].电机与控制学报,2006,110(16): 574-552.
[13] 杨艳,邓智泉,曹鑫,等.无轴承SRM径向电磁力模型[J].电机与控制学报,2009,113(13): 377-383.
[14] WANG H, WANG Y, LIU X, et al. Design of novel bearingless switched reluctance motor[J].IET Electric Power Applications, 2012,6(2): 73-81.
[15] LIU J F, WANG H J, BAO J F. A novel permanent magnet biased bearingless switched reluctance motor[C]∥ECCE, 2013: 4342- 4347.
[16] 曹鑫,邓智泉,杨钢,等.无轴承SRM麦克斯韦应力法数学模型[J].中国电机工程学报,2009,29(3): 78-83.
[期刊荣誉]
中文核心期刊 中国科技核心期刊 中国学术期刊(光盘版)
全国优秀科技期刊 华东优秀科技期刊
中国科学引文数据库来源期刊 中国学术期刊综合评价数据库来源期刊
Design of New Type 12/14 Bearingless Switched Reluctance Motor
BAOJunfang1,XUEBingkun1,TANGShaofei1,WANGHuijun1,YAOBinglei2
(1. College of Instrument Science and Opto Engineering, Beihang University, Beijing 100191, China;2. Shanghai Engineering Research Center of Motor System Energy Saving, Shanghai 200063, China)
In order to solve the magnetic coupling between torque and radial force in the conventional bearingless switched reluctance motor, a novel 12/14 bearingless switched reluctance motor with single windings was proposed. The feature of the new motor was that it was equipped with non-equidistant inner pole arc stator. The special structure stator not only mades the decoupling control of the radial force and torque in bearingless switched reluctance motor become possible, but also introduced the short path concept to the torque. For the new motor, the design of the torque pole and radial force pole were described in detail. Finite element analysis (FEA) was employed to analyze the electromagnetic characteristics of the new motor. Finally, to verify the validity of proposed structure, one prototype motor was manufactured, and related tests were done.
bearingless switched reluctance motor; bearingless magnetic; coupling; mathematic model
王惠军
TM302
A
1673-6540(2015)05-0032-06
2014-10-28