一种基于测深仪的声学Pinger距底高度测量方法*
2015-06-05张同伟杨波丁忠军唐嘉陵刘烨瑶
张同伟,杨波,丁忠军,唐嘉陵,刘烨瑶
(1. 国家深海基地管理中心 青岛 266061; 2. 中国科学院声学研究所 海洋声学技术实验室 北京 100190)
一种基于测深仪的声学Pinger距底高度测量方法*
张同伟1,杨波2,丁忠军1,唐嘉陵1,刘烨瑶2
(1. 国家深海基地管理中心 青岛 266061; 2. 中国科学院声学研究所 海洋声学技术实验室 北京 100190)
在大洋沉积物取样作业中,实时获取取样器距底高度和准确判别取样器是否触底是整个作业的关键。提出了一种基于测深仪的声学Pinger距底高度测量方法,并成功应用到了2013年“蛟龙”号试验性应用航次的常规调查作业中。实际应用表明,该方法不仅能够实时获取声学Pinger距离海底的高度,而且能够准确判断取样器是否触底。
声学Pinger;测深仪;距底高度测量
近年来,随着海洋调查技术和装备水平的不断提升,一些新的海底地质取样技术,如可视取样、原位测量、取样钻机、保真取样等,逐渐应用到大洋科考中[1-8]。尽管如此,重力柱取样器、多管取样器、箱式取样器等常规海底沉积物取样设备仍然在大洋沉积物取样中发挥着重要作用。然而这些常规取样方式存在着难以实时获取取样器距底高度,以及准确判定取样器触底时刻等问题,特别是在大洋调查作业中,水深一般都在数千米。传统的作业方式是,调查人员根据钢缆的倾斜角及作业海深来估算放缆长度,带有极强的人为主观因素。即使是经验丰富的大洋调查人员,仍然难以准确估算放缆长度,经常不是放缆过长,就是施放不到底,给取样作业带来了极大的困难和不确定性。
在实际大洋沉积物取样作业中,实时获取取样器距底高度和准确判别取样器是否触底是整个作业的关键[9]。本文在介绍两种声学Pinger技术的基础上,提出了一种基于测深仪的声学Pinger距底高度测量方法,并将所提方法成功应用到2013年“蛟龙”号试验性应用航次的常规调查作业中,取得良好的应用效果,保障了常规调查作业的顺利实施。
1 声学Pinger距底高度测量方法
1.1 传统声学Pinger方法
传统声学Pinger技术[10]是采用遥测的方法获取取样器的触底时刻。声学Pinger的上下两端各装一小开角发射换能器。其工作原理是,将声学Pinger随钢缆施放于水中后,声学Pinger按预定的时间间隔(如1 s)同时向上和向下发射声脉冲,船上通过水听器接收声脉冲的直达波和海底反射波。当声学Pinger仅用于判断取样器是否触底时,则无需计算声学Pinger距底高度。显然,直达波和海底反射波的到达时差随声学Pinger距海底的高度减小而变小。当声学Pinger抵达海底时,到达时差趋于零,从而可实现取样器的触底判别。
传统声学Pinger技术的优点是除船上水听器外,不需要其他设备;缺点是受海底反射系数、声速变化和悬挂高度等影响,性能不稳定。
1.2 测高声学Pinger方法
实际使用时,就监测取样器的触底信息而言,测量声学Pinger距取样器的高度变化更为方便。与传统声学Pinger不同,本小节介绍的声学Pinger具有测高功能,称之为测高声学Pinger[9]。它的上端安装一小开角的发射换能器,下端安装一小开角收发合置换能器,实现测高功能。其工作原理是,将测高声学Pinger悬挂在取样器上方的一定高度(如50 m),在施放钢缆时,测高声学Pinger的下端换能器按预定的时间间隔(如1 s)向取样器发射声脉冲,同时触发上端换能器向上发射一声脉冲。当测高声学Pinger的下端换能器接收到取样器的反射回波后,立即触发上端换能器再次发射声脉冲。船侧水听器每秒可接收到2个声脉冲信号,根据这2个声脉冲信号的时差就可得到声学Pinger与取样器的距离。实际使用中,无需知道这个距离的具体数值。在取样器未到达海底前,2声脉冲信号的时差保持不变,一旦取样器到达海底,测高声学Pinger与取样器的距离开始变小,使得2个声脉冲的时差也变小。因此,2个声脉冲的时差开始变小的时刻就可以认定为取样器的触底时刻。
测高声学Pinger的优点是:不受海底反射系数、声速变化和悬挂高度等因素的影响;缺点是:① 无法获取取样器距离海底的高度,不利于充分发挥重力取样的优势。当取样器接近海底时,操纵绞车全速放缆,使取样器近似自由落体,利用自身重力产生更高的触底速度,在惯性作用下贯入海底,获取样品;② 通过2个声脉冲时差由不变到变小来判断取样器是否触底,是一个突变过程,不利于实时监测,无疑给操作人员带来很大负担。
1.3 基于测深仪的声学Pinger距底高度测量方法
本节介绍一种基于测深仪的声学Pinger距底高度测量方法,与前2种方法相比,该距底高度测量技术更加简单、成熟和稳定可靠。基于测深仪的声学Pinger距底高度测量方法的工作原理见图1所示。因声波经海底反射后会有较大衰减,故将固定在钢缆上的大开角(超半球形)声学Pinger保持换能器头朝下。声学Pinger与取样器的距离约为50 m。

图1 基于测深仪的声学Pinger距底高度测量
入水前打开声学Pinger,它按预定的时间间隔(默认1 s)持续发射频率为12 kHz的声脉冲(脉冲宽度默认2 ms)。将单波束测深仪的工作模式设置为被动Pinger模式,则安装在船底的单波束测深仪换能器同时接收来自声学Pinger的直达波和经海底的反射波。单波束测深仪自动设定某一初始时刻t0(类似于主动测深模式下的脉冲发射时刻),测得直达波到达时刻t1,海底反射波到达时刻t2,则直达波对应的深度为
h1=c·(t1-t0)/2
(1)
海底反射波对应的深度为
h2=c·(t2-t0)/2
(2)
在实际大洋调查取样中,海水深度通常可达数千米,当取样器接近海底时,直达波和海底反射波之间的夹角Δθ≈0°,则声学Pinger距底高度为
Δh=h2-h1=c·(t2-t1)/2
(3)
由此可见,声学Pinger的距底高度是声速和直达波与海底反射波时间差的函数,而与系统自动设定的初始时刻t0无关。在实际使用中,为获得更加准确的声学Pinger距底高度,声速应选择海底底部的声速值,它可由CTD调查获得。
需要注意的是,声学Pinger入水后在相当长时间内,它距离海底很远,这使得与直达波相比,海底反射波非常微弱,几乎被淹没在直达波和背景噪声中,此时测深仪只能获得直达波对应的深度h1(当然,这个深度值只是一个相对值,而不是声学Pinger的真实深度)。只有当声学Pinger接近海底时,海底反射波与直达波强度相差不大,此时测深仪能同时获得直达波的深度h1和海底反射波的深度h2(同样,对应的深度也是相对值),两者做差(h2-h1),即可估算出声学Pinger距离海底的高度Δh。
在实际应用中,需要首先确认单波束测深仪或浅地层剖面仪具有12kHz的收发换能器,即它可以采用12kHz频率测量海深;然后确认单波束测深仪或浅地层剖面仪具备被动Pinger工作模式;最后配上12kHz的通用声学Pinger(如IXSEAEP861S)即可实现距底高度测量。
与1.1节中采用水听器接收声学Pinger的直达波和海底反射波相比,测深仪采用具有指向性换能器阵接收声波,并通过系统内部的一系列信号处理算法,提高了微弱信号的检测能力,性能更加稳定可靠。
1.4 基于测深仪的声学Pinger距底高度测量方法的实现步骤
本文所提出的基于测深仪的声学Pinger距底高度测量方法,其特征在于:充分利用船载单波束测深仪的被动Pinger模式实现声学Pinger的距底高度测量。它将声学Pinger固定在悬挂取样器的钢缆上,保持换能器头朝下,距离取样器约50m。待钢缆释放长度与海深相差小于750m时,通过单波束测深仪的被动Pinger模式接收声学Pinger的直达波和海底反射波,并给出两者相对于同一初始时刻的深度值(相对值),读取两深度值并做差,即可获得声学Pinger的距底高度。其实现过程分为以下6步。
步骤1:待钢缆施放50m时,绞车停止放缆,折臂吊摆回船舷,安装声学Pinger,保持换能器头向下,安装完成后开启声学Pinger,使之不断发射声脉冲。
步骤2:开启单波束测深仪,设置为被动Pinger模式,并确认能够接收到声学Pinger的直达波。
步骤3:单波束测深仪切换至主动测深模式,准确测量海水深度。
步骤4:待绞车放缆长度与海深相差750m时,单波束测深仪切换回被动Pinger模式,根据直达波信号强度合理调整“通道增益”,通过调整“海底增益”使海底反射波能够合理显示。
步骤5:分别读取直达波和海底反射波对应的深度值,并据此估计声学Pinger距底高度,待声学Pinger距底高度为50m时,表示取样器已经触底。
步骤6:待声学Pinger出水后,回收声学Pinger。
2 测量装备
2.1 Bathy2010单波束测深仪[11]
“向阳红09”船(“蛟龙”号载人潜水器支持母船)上装备的单波束测深仪(也称浅地层剖面仪)是美国SyQwest公司的Bathy2010。它利用CW和Chirp技术,发射声脉冲的重复性好,采用阵列波束形成技术,旁瓣得到很好的抑制,实现了全海深的深度和浅地层剖面测量,其主要技术指标如表1所示。它配备了两种频率的换能器,分别为3.5kHz和12kHz。其中3.5kHz换能器的水深穿透深度为12 000m,实现全海深覆盖,其地层穿透能力较强,可达300m;12kHz换能器的水深穿透深度可达6 000m,传播脉冲混响小。同时,它采用了SyQwest公司独有的水底探测跟踪算法和水底数字化技术,确保了在陡坡地形和高噪声环境中实现水底跟踪。

表1 Bathy2010主要技术指标
Bathy2010具备3种工作模式,分别为主动模式、被动Pinger模式和外部触发模式。主动模式和外部触发模式主要用于海深测量或浅地层剖面测量;被动Pinger模式下通过与声学Pinger配合可测量声学Pinger距底高度。需要注意的是,同一时间,Bathy2010只能够工作于一种模式。当工作于主动模式或外部触发模式时,只能够用于测深或浅地层剖面测量,不能接收Pinger信号;当工作于被动Pinger模式时,只能够接收Pinger信号,无法实现测深或浅剖功能。被动Pinger模式匹配的信号频率为12 kHz,有效脉冲宽度为2 ms、5 ms和10 ms。
2.2 EP861S声学Pinger
声学Pinger采用法国IXSEA公司的EP861S。与其他海洋信标不同,EP861S功能比较单一,仅具备Pinger功能,表2给出了其主要技术指标。EP861S的默认工作频率为12 kHz,发射周期为1 s,CW脉冲宽度2 ms,正好与Bathy2010中的被动Pinger模式相匹配。

表2 EP861S声学Pinger主要技术指标
3 在2013年“蛟龙”号试验性应用航次常规调查作业中的应用
3.1 海水深度测量
启动单波束测深仪后,设置为主动模式,工作频率选择为3.5 kHz。与12 kHz相比,3.5 kHz 对应的波长大,其测量精度低。在上千米海深时,一般采用3.5 kHz。这样其测量速度更快,可以在最短的时间内测得海深数据。
3.2 基于测深仪的声学Pinger距底高度测量
单波束测深仪设置为被动Pinger模式,工作频率选择为12 kHz。设置完成后,单波束测深仪进入被动Pinger工作模式,开始接收声学Pinger脉冲信号,并随机设置初始时刻,实现对声学Pinger的自动跟踪。此时,“深度值”窗口显示的是声学Pinger直达波对应的深度值,但该深度值是一个相对值,不代表声学Pinger真实深度。
每收到一个声学Pinger直达波后,它都会在“数据记录显示”窗口打一黑点。随着声学Pinger不断下降,其“数据记录显示”窗口中的黑点连成一条不断下降黑线;当声学Pinger不断上升时,相应的黑线也不断上升;当声学Pinger深度不变时,相应的黑线保持水平。黑线的斜率在一定程度上反映了声学Pinger的深度变化速度。
大洋科考作业海域的水深一般在数千米,声学Pinger入水后的相当长一段时间内,测深仪只能接收到直达波,即“数据记录显示”窗口只有一条下降的黑线。当声学Pinger下降到距离海底750 m以内时,收到的海底反射波才是有意义的。通过合理调整增益,使海底反射波能够合理显示。随着声学Pinger深度的进一步下降,“数据记录显示”窗口中海底反射波对应的黑线不断上升,与直达波对应的黑线斜率正好相反。这样,在“数据记录显示”窗口读取当前时刻的直达波对应的深度值和海底反射波对应的深度值,两者做差即是声学Pinger距底高度。
图2给出了某站位沉积物取样过程中单波束测深仪工作记录。
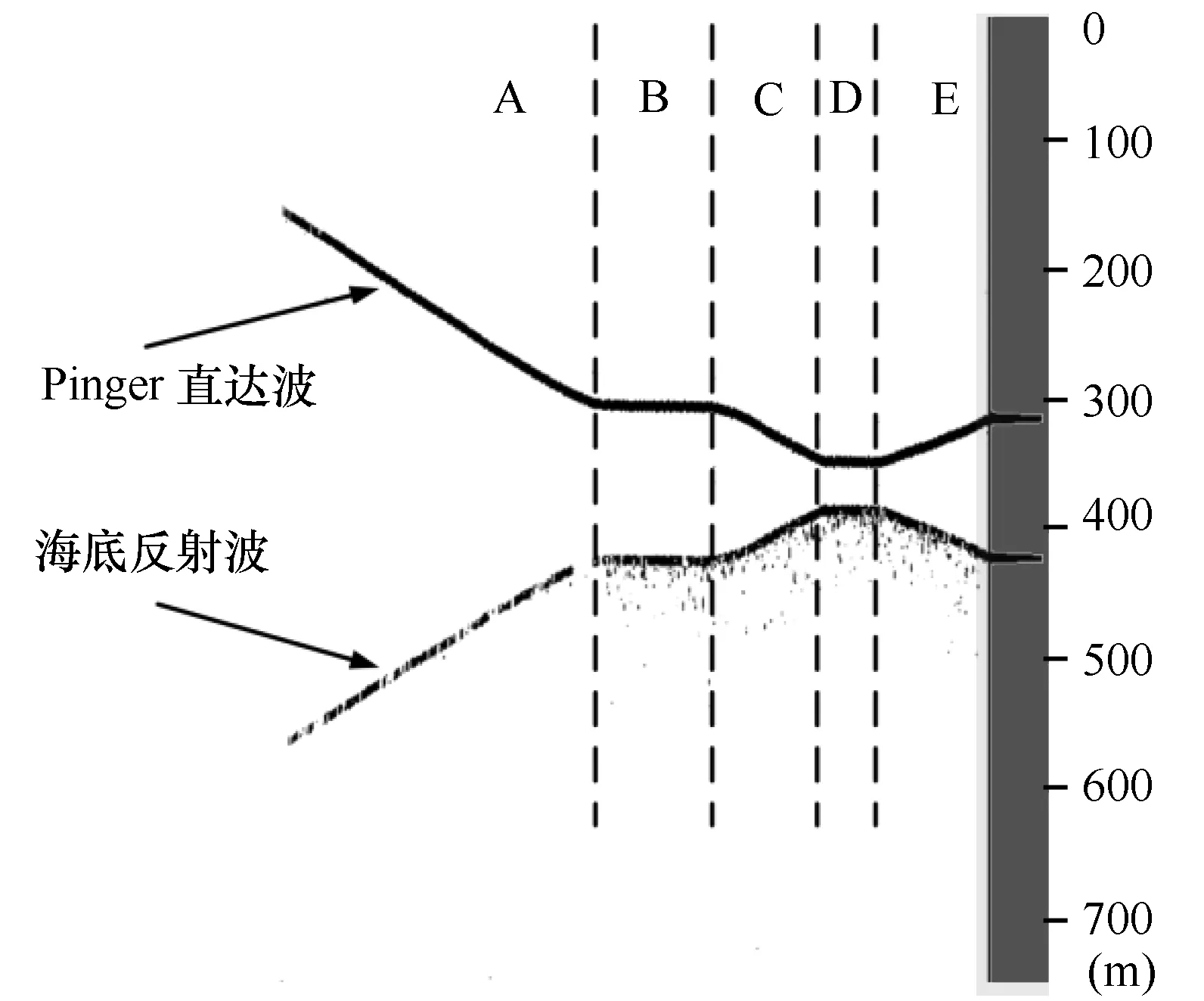
图2 某站位沉积物取样过程中单波束测深仪工作记录
由图2可见,基于测深仪的声学Pinger距底高度测量方法能够实时获取声学Pinger距底高度,并能准确判别取样器是否触底。在被动Pinger模式下,单波束测深仪的工作可以分为5个阶段。
A阶段:声学Pinger距离海底高度大于 120 m,绞车持续匀速放缆,声学Pinger不断下降。
B阶段:声学Pinger距离海底高度为120 m,绞车停止放缆,声学Pinger深度保持,取样器依靠自身重力调整姿态,使之处于垂直状态。
C阶段:取样器姿态调整完毕后,绞车全速放缆,直至取样器触底,声学Pinger距离海底高度由120 m减小为40 m。
D阶段:声学Pinger距离海底高度为40 m,绞车停止放缆,停留约5~10 min,待取样器状态稳定。
E阶段:绞车开始回收钢缆,声学Pinger距离海底高度由40 m开始增加,超过50 m时,取样器离开海底。
4 总结
在实际大洋沉积物取样作业中,实时获取取样器距底高度和准确判别取样器是否触底是整个作业的关键,在没有触底检测设备时,全凭作业人员的经验。如果作业水域存在海流,甚至上下水层的海流方向不同,钢缆在水下的形状更复杂而且无法预知,估算就更不准确。取样器触底如果判断不准将会带来如下问题:① 未触底,取样失败;② 放缆过长,致使钢缆打结,极易造成钢缆损坏。
在充分调研声学Pinger技术的基础上,提出了一种基于测深仪的声学Pinger距底高度测量方法,并成功应用到了2013年“蛟龙”号试验性应用航次的常规调查作业中。在历次重力柱取样、箱式取样和多管取样中,均能实时获取声学Pinger距离海底的高度,准确判断取样器是否触底,保证了海底沉积物取样的顺利实施。
[1] 阮锐. 海底重力取样技术的探讨[J]. 海洋测绘,2009,29(1): 66-69.
[2] 段新胜,鄢泰宁,陈劲,等. 发展我国海底取样技术的几点设想[J]. 地质与勘探,2003,39(2): 69-73.
[3] 补家武,鄢泰宁,昌志军. 海底取样技术发展现状及工作原理概述:海底取样技术专题之一[J]. 探矿工程,2001(2): 44-48.
[4] 鄢泰宁,补家武,李邵军. 浅析国外海底取样技术的现状及发展趋势[J]. 地质科技情报,2000,19(2): 67-70.
[5] 张庆力,刘贵杰,刘国营. 新型海底沉积物采样器结构设计及采样过程动态分析[J]. 海洋技术,2009,28(4): 20-23.
[6] KRISTOFFERSEN Y,LIEN E,FESTERVOLL K,et al. The hydrostatic corer Selcore:a tool for sediment sampling and geophysical site characterization[J]. Marine geology,2006,229: 101-112.
[7] WANG J,QIN H,CHEN Y. Implementation of a seafloor sediment corer with a novel hydrostatic motor[J]. Marine Technology Society Journal,2012,46: 40-47.
[8] LUNNE T,LONG M. Review of long seabed samplers and criteria for new sampler design[J]. Marine Geology,2006,226: 145-165.
[9] 王清池,许肖梅,许鹭芬,等. 大深度触底指示器Pinger换能器及其声反射系统[J]. 海洋科学,1997,21(6): 61-63.
[10] ALDRED R G,THURSTON M H,RICE A L,et al. An acoustically monitored opening and closing epibenthic sledge[J]. Deep Sea Research and Oceanographic Abstracts,1976,23: 167-IN166.
[11] 臧卓,马云龙,刘勇,等. Bathy2010P浅地层剖面仪在海洋工程中的应用[J]. 仪器仪表用户,2009,16(3): 51-53.
国家自然科学基金重点项目(41330965);“十三五”863重大专项“4500米载人潜水器总体集成”(SS2014AA091801).
U666.7
A
1005-9857(2015)03-0073-05
