假肢智能膝关节的研究现状和发展趋势
2015-06-01王振平喻洪流杜妍辰曹武警胡杰
王振平,喻洪流,杜妍辰,曹武警,胡杰
上海理工大学医疗器械与食品学院(上海,200092)
假肢智能膝关节的研究现状和发展趋势
王振平,喻洪流,杜妍辰,曹武警,胡杰
上海理工大学医疗器械与食品学院(上海,200092)
近年来,随着交通、工伤事故、自然灾害以及心血管等造成的截肢人数的增多,假肢智能膝关节的研究成为各国研究的热点,而高性能的假肢智能膝关节的控制仍然是研究的难点。本文在对假肢智能膝关节进行分类的基础上,对智能膝关节的测控方法进行了分析,并对假肢智能膝关节未来发展趋势进行展望。
假肢;智能膝关节;控制;研究现状
0 引言
据有关数据统计,截止2006年,我国残疾人占全国人口的比例为6.34%,其中肢体残疾2 412万人,占残疾人总数的29.07%[1],下肢截肢人数约为158万人[2],并且近年来此数据还在不断增长。下肢残疾患者不能进行正常行走,对其心理、日常生活、就业等方面造成了不便。另外,对于这类残疾人,国家和社会需要对他们进行额外的补偿和照顾,增加了社会负担。由于目前医疗水平尚不能是肢体再生,为这些截肢者安装人工腿(假肢)就成了恢复其行走功能的唯一手段。对于下肢残疾的患者,穿戴下肢假肢完全可以达到对人体缺失功能的代偿,使患者生活自理,甚至进行工作,从而回归社会。
下肢假肢主要由接受腔、假脚与踝关节、膝关节和其他部件组成,其中膝关节是最重要的功能部件[3]。高性能的假肢膝关节可以保证患者在支撑期(从足跟触地到足趾离地的期间)的稳定性和摆动期(从足趾离地到踵触地期间)的灵活性。智能膝关节可以自动调整假肢膝关节控制力矩来适应步行速度、关节角度的变化,使假肢步态在对称性和跟随性方面更接近健康人步态,具有较高的仿生性能,因此也成为国际研究的热点。
1 智能膝关节的分类
目前,假肢智能膝关节还没有一个统一的定义。一般认为智能膝关节是采用微电脑控制的、可以对膝上假肢进行摆动相速度对称性进行自动调节且(或)可以对站立相的稳定性进行自动控制的膝关节。如果有的假肢膝关节采用微电脑控制,但并未采用智能控制方法,或者说其摆动速度不能自适应调节,或不能自动控制站立相稳定性时,实际上并不具有“智能”,只能算是一种广义概念上的智能膝关节。为讨论方便起见,这里讨论的智能膝关节包括所有微电脑控制的膝关节。现在全世界的智能膝关节种类繁多,按照是否为膝关节屈伸提供动力,可分为外动力膝关节和无动力膝关节。鉴于目前产品化的外动力膝关节只有Power knee一款,此处主要针对无动力膝关节相关产品进行分类,总体上可按照膝关节转轴数量、摆动相阻尼产生方式、支撑相稳定性控制方式3方面进行分类。下面就不同的分类方法及研究成果进行归纳,结果见表1。

表1 假肢智能膝关节的分类Tab.1 Classification of intelligent prosthetic knee
2 假肢智能膝关节的测控方法
智能膝关节与以前研制的机械式膝关节控制方法有很大的不同,以液压膝关节为例:根据传感器测出的实时步行速度,通过电机控制流量控制阀的开度,来改变膝关节弯曲和伸展的阻尼,最终达到膝关节的弯曲和伸展速度都能随着患者步行速度的变化而变化。智能膝关节的控制从过程方面来说,包括了步态信息的测量与假肢侧跟踪控制两个大的方面。
2.1 步态信息测量
步态信息按照信息源的性质,分为肌电信号和生物力学信号两类。下面就肌电信号和生物力学信号两方面分别进行分析。
2.1.1 肌电信号
肌电(EMG)信号控制系统是根据肌肉的电信号进行步态判断,进而控制假肢膝关节的运动的控制方法。EMG信号作为一个信息源,并用来作为控制源已经有很多应用,如外骨骼上肢、外骨骼手,上肢假肢等方面[5-6]。近年来用肌电信号控制下肢假肢也是研究的热点:Cheron G等[7](2003年)利用动态递归神经网络,通过对肌电信号进行模式识别,预测下肢关节角度。Herr H等[8](2005年)提出了基于EMG的膝下假肢主动踝关节的位置控制方法。Huang H等[9](2009年)利用EMG信号来识别7种运动模式,并且达到90%的准确率。Hardaker PA等[10](2013)通过对比实验得出肌电信号传感器的最佳放置位置在股四头肌。但是肌电信号控制下肢没有上肢假肢和外骨骼进展快,这是因为下肢要进行支撑人体、协调步速、适应路况等复杂任务,这些都涉及肌肉和神经多个变量因素,各个因素之间相互作用,另外肌电信号本身容易受空气与人体自身状态等因素影响,因此对控制理论的研究提出了很高的要求[11]。从目前的研究来看,大部分研究都仍处于实验室水平和理论研究,并且肌电信号的研究主要是用于运动模式的识别,距实际应用还有很大的距离。
2.1.2 生物力学信号
该方法通过对步态信息进行步态判断,来控制假肢膝关节的运动。生物力学信号的获取分为从假肢侧和健侧获取信号两种途径:通过健侧获取生物力学信号是用安装在健康腿上的传感器获取健肢的运动信息,假肢根据健侧的运动信息实时地跟踪健康腿的步态,病人无需训练就能直接安装使用,获得实时步态对称性,从而改善步态舒适性。另一种途径是通过假肢侧获取生物力学信号。2006年,Ossur公司推出的主动膝关节假肢Power Knee就是通过对健康腿关节运动信息及足底压力的测量,实现了对健侧的生物力学信号的获取[12]。而文献[13]中Varol HA等(2010年)首先利用假肢侧传感器的数据进行模式训练,并最终通过实时数据能够识别坐、站立、行走状态的开始、终止和过度,准确率达到100%,模式转换之间仅达到500 ms的延迟。用生物力学进行步态信息测量的方法的研究依赖于传感器的精度、灵敏度、安装位置等因素,但是重点仍然集中在建立阻尼控制参数、运动参数之间的耦合关系,并建立相应的动力学模型及数值算法等。
步态信息的测量可分别使用肌电信号和生物力学信号,也可以同时使用两种测量方式。如文献[14]的研究中,同时用到肌电信号和假肢侧的生物力学信号,在运动模式的识别中支撑相准确率达到了99%以上,摆动相准确率达到了95%,并且结果显示这种方式比单独使用肌电信号或者生物力学信号用于模式识别效果要明显。
2.2 假肢侧的跟踪控制
2.2.1 现有产品常用控制技术
2.2.1.1 基于有限状态机的专家控制
有限状态机是表示有限个状态以及这些状态之间的转移和动作的数学模型,一个有限状态机包含3个部分:一个用于描述系统不同状态的有限状态集;一个用于表示系统所接收的输入信息的输入集;一个状态转移规则的规则集[15]。该方法利用人体正常行走时重复运动的特性,通过对典型事件即步态的典型状态进行规划,根据假肢上传感器检测出的信息对应的不同事件,根据控制模式数据库制定的规则进行动作输出[15-16]。很多不同种类的下肢假肢都用到了基于有限状态机的专家控制[17-18],其中动力膝关节通常用到有限状态机的专家控制来控制关节阻抗和关节位置[19],这种控制方法易于实现,但是因假肢本身步态的异常性,较难模拟实际的正常步态,而且还需要繁杂的训练来获得控制的目标参数,使用不便。英中耐Adaptive Knee和奥托博克C-Leg[20]都是用到专家控制的典型产品。
2.2.1.2 模糊控制
模糊控制是一种智能控制方式,是操作者根据自己的经验设计能模仿人工智能的模糊控制器进行的控制,具有很强的稳定性和鲁棒性。模糊控制器是模糊控制的核心,它是根据美国控制理论专家Zadeh LA教授1965年提出的模糊控制集合的概念,运用模糊集理论,将人的经验模糊转化为可数学实现的控制器,最终实现对被控对象的实时控制[21-23]。如一种模糊控制方式:通过第n次和第n-1次测量值的差Tn-Tn-1与设定值T0的比较,得出第n+1次输出值与第n次输出值的关系:
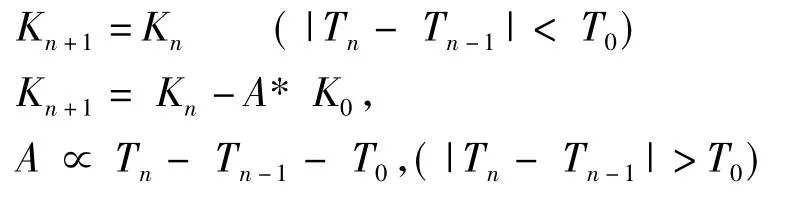
其中A为增益系数,T0、K0为设定值,其中Tn是测量值,Kn是输出值,对增益系数A,第n次和第n-1次测量值T的差Tn-Tn-1与设定值T0比较,当两者在允许范围内时,输出值不变;当两者偏差越大,增益系数A就越大,最终保持输出值稳定。模糊控制的模糊规则全靠经验进行,信息简单的模糊处理导致控制精度降级。但是模糊控制很容易和PID控制、变结构控制、自适应控制、最优控制等传统控制方法结合,发挥各自优点,具有很好的应用前景。德林公司的Auto-Pilot膝关节是应用模糊控制的典型产品。
2.2.1.3 神经网络控制
人工神经网络(Artifficial Nerual Networks,ANNs)简称神经网络,基于神经网络的控制称为神经网络控制(NNC)。目前使用得最广泛的是T.Koholen的定义,即“神经网络是由具有适应性的简单单元组成的广泛并行互连的网络,它的组织能够模拟生物神经系统对真实世界物体所作出的交互反应。”神经网络是通过对人的神经系统的模拟,用于信息处理的一种非精确的数学模型。神经网络控制具有并行分布性处理、可学习性、较强鲁棒性、和较强泛化能力的特点,并且对任何规则都可通过范例学习存储于神经网络,通用性强。因此神经网络用于膝关节控制系统是必然趋势。但是鉴于神经网络不能解释自己的推理过程和推理依据、数据不充分使神经网络无法进行工作等缺点,在膝关节的控制中,经常会用神经网络控制与其他智能控制方式相融合(即基于神经网络的智能控制)或者是基于传统控制理论的神经控制,这些技术目前都处于研究中,并未应用于现有产品。奥索公司研发的Reoh Knee膝关节是运用神经网络控制的典型产品。
2.2.2 处于研究中未实际应用的控制技术
目前商业化的智能膝关节大部分应用的智能控制方法限于简单的专家控制、模糊控制、神经网络控制,更为复杂的智能控制方法还未得到应用。这些还处于研究中的方法大多都是基于专家控制、模糊控制、神经网络控制等的智能控制技术,或是运用不同的方法论或使它们与传统的控制理论相结合,如文献[24]的模糊控制中,通过对比查找表、网格划分和群集的3种不同的基于数据的方法论,得出在不同的步速中,用网格划分和群集的方法论是控制假肢步态的最优选择的结论。文献[25]中,A.A.Alzaydi等人(2011年)在动力膝关节的控制中,通过对神经网络控制和模糊控制在处理不确定数据和是否需要训练等多方面的对比,最终选用模糊PID控制来控制膝关节直流电机。在国内人工神经网络中的诸多模型被用于膝关节控制的研究:上海理工大学喻洪流教授等人设计了基于小脑模型神经网络控制器的智能膝上假肢[26],河北工业大学杨鹏教授的团队基于BP神经网络的运动模式识别和基于概率神经网络的步态识别的研究等[27,28]。此外,神经网络专家控制、神经网络模糊逻辑控制等复合智能控制技术也处于不断研究中。
3 智能膝关节的发展趋势
通过对上述智能膝关节研究现状的分析,我们可以看出现有的智能膝关节仍存在很多不足,克服这些不足还需要解决很多技术难题。智能膝关节的未来发展趋势将主要体现在如下几个方面:
(1)安全性更加提高,价格相对降低。
膝关节假肢对于截肢患者来说是另一条腿,其安全性对患者来说是要考虑的第一要素。目前已有的高性能的膝关节,价格从30到60万元不等,随着技术的不断进步,高性能的膝关节假肢会越来越多,价格必然有所下降。
(2)使用方便、舒适,可多模式控制,步速可实现宽范围自动调整。
现有的很多假肢患者穿戴不便,行走时会使患者感觉到不适,尤其在不同路况的情况下。未来的膝关节假肢将会减少患者的不适,也不需要患者进行过长时间的训练,就能使穿戴者完成行走、蹲、坐等多姿态的适应,同时步速可以实现在宽范围内的自动调整,无需患者进行手动调整,就能使穿戴者适应不同的路况,不同的速度。
(3)更加智能化的控制,更高的控制精度。
随着微处理器技术的进步,各国在智能膝上假肢的研究在控制方法方面也取得了成就,智能控制的方式更加多样化,控制精度也在不断改进提高。从这些进步中,可以看出具有自适应、自组织、和自学习功能的智能控制技术,特别是具有实时和快速学习性能的智能控制技术,是未来发展的必然趋势。
(4)能与智能髋踝关节协调控制,最终渐进于正常腿的步态。
目前大部分智能假肢只考虑了膝关节的作用,髋踝关节只是作为辅助,无法完全像正常腿一样行走。要使膝关节的步态接近于正常腿的步态,必然要同样考虑髋踝关节的结构和控制的复杂性,使其也智能化,并且完成膝关节和髋踝关节的协调控制。总之,随着机械、材料、控制、康复医学等学科的进步及其不断的交叉融合,将来的假肢智能膝关节具有价格低廉、控制精度更加提高、智能化程度更加完善、步态趋于正常腿步态的特点。
[1]中华人民共和国国家统计局,第二次全国残疾人调查领导小组.《2006年第二次全国残疾人抽样调查主要数据公报》(第一号)[EB/OL].(2007-11-21).[2015-02 -23].http://www.cdpf.org.cn/sjzx/cjrgk/200804/ t20080407_387580.shtm l.
[2]杨鹏,刘作军,耿艳利,等.智能下肢假肢关键技术研究进展[J].河北工业大学学报,2013(1):76-80.
[3]喻洪流.假肢矫形器原理与应用[M].南京:东南大学出版社,2011,104-105.
[4]刘爱峰,马剑雄,魏强等.膝关节生物力学模型研究进展[C].//中国矫形外科杂志.2013:1774-1776.
[5]Ngeo J,Tamei T,Shibata T.Estimation of continuousmulti-DOF finger joint kinematics from surface EMG using amultioutput Gaussian process[C]//Engineering in Medicine and Biology Society(EMBC),2014 36th Annual International Conference of the IEEE.IEEE,2014:3537-3540.
[6]Jin D,Zhang R,Zhang J,et al.An intelligent aboveknee prosthesis with EMG-based terrain identification[C]//Systems,Man,and Cybernetics,2000 IEEE International Conference on.IEEE,2000,3:1859-1864.
[7]Cheron G,Leurs F,Bengoetxea A,et al.A dynamic recurrent neural network for multiple muscles electromyographicmapping to elevation angles of the lower limb in human locomotion[J].JNeurosci Meth,2003,129(2):95 -104.
[8]Au SK,Bonato P,Herr H.An EMG-position controlled system for an active ankle-foot prosthesis:an initial experimental study[C].//International Conference on Rehabilitation Robotics.IEEE,2005:375-379.
[9]Huang H,Kuiken TA,Lipschutz RD.A strategy for identifying locomotionmodes using surface electromyography[J].IEEE T Bio-Med Eng,2009,56(1):65-73.
[10]Hardaker PA,Passow BN,Elizondo D.State detection from electromyographic signals towards the control of prosthetic limbs[C]//Computational Intelligence(UKCI),2013 13th UKWorkshop on.IEEE,2013:120-127.
[11]耿晓博.肌电信号控制下肢假肢关键技术研究[D].河北工业大学,2013.
[12]OSSUR.The POWER KNEE[EB/OL].[2015-4-13].http://www.ossur.com/prosthetic-solutions/products/ knees-and-legs/bionic-knees/power-knee
[13]Varol HA,Sup F,Goldfarb M.Multiclass real-time intent recognition of a powered lower limb prosthesis[J].IEEE T Bio-Med Eng,2010,57(3):542-551.
[14]Huang H,Zhang F,Hargrove L J,et al.Continuous locomotion-mode identification for prosthetic legs based on neuromuscular-mechanical fusion[J].IEEE T BIOMED ENG,2011,58(10):2867-2875.
[15]Zlatnik D,Steiner B,Schweitzer G.Finite-state control of a trans-femoral(TF)prosthesis[J].IEEE TCONTR SYST T,2002,10(3):408-420.
[16]Ochoa-Diaz C,Rocha TS,de Levy Oliveira L,etal.An above-knee prosthesis with magnetorheological variable -damping[C]//Biomedical Robotics and Biomechatronics(2014 5th IEEE RAS&EMBS International Conference on.IEEE,2014:108-113.
[17]Herr H,Wilkenfeld A.User-adaptive control of amagnetorheological prosthetic knee[J].IND ROBOT,2003,30(1):42-55.
[18]Sup F,Varol HA,Goldfarb M.Upslope walking with a powered knee and ankle prosthesis:initial results with an amputee subject[J].IEEE T Neur Sys Reh,2011,19 (1):71-78.
[19]Zhang F,Liu M,Huang H.Effects of Locomotion Mode Recognition Errors on Volitional Control of Powered Above -Knee Prostheses.[J].IEEE T Neur Sys Reh,2014,23(1):64-72.
[20]Industry IOBO.Manual for the 3c100 Otto Bock C-LEG[R].Duderstadt,Germany,1998.
[21]张广举.基于膝关节角度的助行功能性电刺激模糊控制研究[D].天津大学,2010.
[22]Pires DS,Serra GLO.A newmethodology formodelbased robust fuzzy digital PID controller design[C]//Proceedings of the 2012 Third Global Congress on Intelligent Systems.IEEE Computer Society,2012:264-267.
[23]Khan MW,Choudhry MA,Zeeshan M.An efficient design of genetic algorithm based Adaptive Fuzzy Logic Controller for multivariable control of HVAC systems[C]// Computer Science and Electronic Engineering Conference (CEEC),2013 5th.IEEE,2013:1-6.
[24]Caltenco-Arciniega HA,Melendez-Calderon A,Dosen S,etal.Comparison of different fuzzy controllers for powered prosthetic gait[C]//Proceedings of the Electronics,Robotics and Automotive Mechanics Conference.IEEE Computer Society,2007:651-656.
[25]Alzaydi AA,Cheung A,Joshi N,et al.Active prosthetic knee fuzzy logic-PID motion control,sensors and test platform design[J].IJSRET,2011,2(12):1-17.
[26]喻洪流,钱省三,沈凌,等.基于小脑模型神经网络控制的步速跟随智能膝上假肢[J].中国组织工程研究与临床康复,2007,11(31):6233-6235.
[27]刘磊,杨鹏,刘作军,等.BP神经网络大腿截肢者运动模式识别[J].计算机仿真,2014,31(5):331-335.
[28]袁娜.基于概率神经网络的步态识别[D].河北工业大学,2014.
Research Status and Development Trend of Intelligent Prosthetic Knee
WANG Zhenping,YU Hongliu,DU Yanchen,CAOWujing,HU Jie School of Medical Instrument and Food Engineering,
University of Shanghai for Science and Technology(Shanghai,200093)
In recent years,with the increasing number of amputation caused by traffic accidents,natural disasters or cardiovascular diseases,the research on about intelligent prosthetic knee has become a research focus.However,the control of intelligent prosthetic knee with high performance is still the difficulty of research.In this paper,based on the classification of intelligent prosthetic knee,controlmethods of intelligent knee jointwere analyzed,and the future development trend of intelligent prosthetic knee was discussed aswell.
prostheses,intelligent prosthetic knee,control,development trend
R318.1
A
1674-1242(2015)03-0159-05
10.3969/j.issn.1674-1242.2015.03.008
2015-04-21)
王振平,E-mail:jixie777@126.com
喻洪流,E-mail:yhl98@hotmail.com