基于DM6437硬件平台的智能目标跟踪系统设计
2015-06-01刘伟
刘 伟
(铜陵职业技术学院电气工程系,安徽 铜陵 244061)
基于DM6437硬件平台的智能目标跟踪系统设计
刘 伟
(铜陵职业技术学院电气工程系,安徽 铜陵 244061)
以DM6437硬件平台为核心,提出了一种智能目标跟踪系统设计方案,从硬件组成、特点、结构、功能和软件的设计流程两方面给出了设计思路,测试了不同环境下的跟踪效果,指出下一步的改进方向.该设计硬件成本低廉、算法易于实现,具有一定的实用性.
目标跟踪;DM6437;均值漂移;卡尔曼滤波器
最近几十年,视频处理技术得到迅速发展,并取得较大成就[1-2].目标跟踪作为一个极具挑战性的核心技术,已被广泛的应用在人机交互、智能监控、医学图像处理等领域中.视频目标跟踪,就是实时地定位一个或者多个运动目标的过程,通过对视频帧进行一些算法处理后输出运动目标的位置[3].目标跟踪的本质是在图像序列中识别出目标的同时对其进行精确定位.为了克服噪声、背景的改变等对目标识别带来的困难,出现了很多的跟踪算法.
本文以低成本、高性能的DM6437芯片为硬件平台,提出了一种经济实用的实时目标视频跟踪系统的设计方案.该系统设计从硬件和软件两个方面给出了设计思路,硬件部分的核心为基于DM6437的视频开发板,软件设计部分给出了开发思路及算法流程图.此设计为开发低成本、高性能的智能目标跟踪系统提供了一种选择.
1 硬件设计
1.1 硬件组成
如图1所示,该系统硬件部分由DM6437硬件平台系统、智能高速球、终端监控器、运动目标等组成.
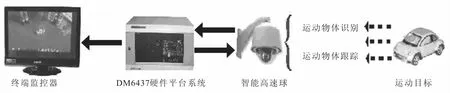
图1 智能视频目标跟踪系统结构示意图
从摄像头采集到的视频数据,通过数据线传输到DSP端,DSP端接收、处理视频数据,通过网络传输到PC机的接收端进行显示.
智能视频目标跟踪系统首先通过智能高速球形摄像机采集到运动目标图像,传输至DSP端的硬件平台系统,硬件平台系统接收、处理视频数据,确定运动目标所在图像的位置,得到该位置与图像设定位置或区域的偏差及方向,然后通过控制器将偏差转换为控制输出量,控制摄像头转动到设定位置,从而消除偏差[4].
DM6437硬件平台系统资源如图2所示.

图2 DM6437智能目标跟踪系统资源图
1.2 CPU
DM6437数字媒体处理器是首批支持达芬奇技术的纯DSP器件,以低于以往的价位提供了更高的视频性能.其强大的功能,可支持D1解析度的H.264视频编码,结合增强型DSP内核与最新视频处理子系统(VPSS),DM6437能够提高视频性能,以D1解析度实现高达H.264的视频编码.或根据目标应用(如IP网络监控摄像头)的要求运行完整的音视频与联网功能,而成本则比TI前代DSP数字媒体处理器下降了50%.DM6437针对车载视觉、视频监控以及IP视频电话等特定应用进行了优化,成本较此前被大量使用的DM64x降低了50%.
DM6437处理器采用新型TMS320C64x+内核,工作频率在300至600 MHz之间.DM6437针对不同视频应用,提供了最佳性能、外设与成本选择.DM6437有分别针对编码、解码和编/解码的产品,DM6437还有不同的总线和外设搭配.DM6437支持CAN总线接口,集成了32位PCI(33MHz),可提供32 KB L1P高速缓存/SRAM,32 KB或80 KB L1D,64或128 KB L2高速缓存SRAM存储器,以及异步8位宽EMIF.DM6437包括32位DDR2 SDRAM(266 MHz)存储控制器,这对要求更高储存器带宽的数字视频应用而言至关重要.此外,该处理器提供的其它外设还包括10/100以太网MAC、两个UART、I2C、SPI、GPIO、McASP与三个PWM.
毫无疑问,DM6437为客户提供了低成本、高性能的设计选择.
1.3 板卡
1.3.1 板卡特点
DM6437是低成本,高度集成的高性能视频信号处理开发平台,可以开发仿真达芬奇系列DSP应用程序,同时也可以将该产品集成到用户的具体应用系统中,方便灵活的接口为用户提供良好的开放平台[5].如图3所示为开发板结构框图.
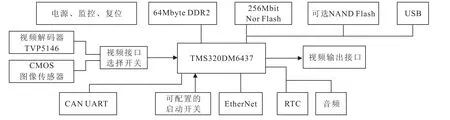
图3 开发板结构框图
1.3.2 硬件资源
(1)TMS320DM6437DSP,可工作在400/600 MHz;
(2)2路视频输入,包括一个复合视频输入及一个S端子视频输入;
(3)保留了视频输入接口,可以方便与CMOS影像传感器连接;
(4)3路视频输出,包括2路复合视频,一路S端子输出;
(5)64M Byte的DDR2 SDRAM存储器,256M bit的Nor Flash存储器,用户可选的NAND Flash接口;
(6)256 K字节的I2C Epprom;
(7)1个10 M/100 Mbps自适应以太网接口;
(8)1路立体声音频输入、1路麦克风输入,1路立体声音频输出;
(9)USB2.0高速接口,方便与PC连接;
(10)1个CAN总线、1个UART接口、实时时钟(带256 Byte的电池保持RAM);
(11)4个DIP开关,4个状态指示LED;
(12)可配置的BOOT模式;
(13)10层板制作工艺,稳定可靠;(14)标准外部信号扩展接口;(15)JTAG仿真器接口;(16)单电源+5 V供电.
1.4 功能概述
如图4所示,DM6437视频开发板通过专用的DDR2存储控制器接口扩展了64Mbytes的DDR2SDRAM,为视频应用带来了高吞吐、高容量存储带宽,并可以扩展到最大256MByte;256Mbit的Nor Flash为视频应用程序脱机运行提供了有力的容量保证;板卡通过一个视频解码芯片和CPU连接,使得CPU可以接受外部的复合视频信号输入和S信号输入,信号都是自动检测,大大提高了视频处理的灵活性;CPU还提供视频DAC,通过几个运算放大器即可把DDR2存储器内的数据输出为用户可观察到的信号,非常方便;除此之外,板卡还包括很多资源,包括音频输入输出、10M/100M的自适应以太网接口、USB2.0接口、实时时钟、4位LED指示和4位DIP开关量输入、CAN总线及UART接口等等一系列功能;最重要的是所有外部存储器接口信号都连接到扩展接口上,用户可以通过设计外部子板扩展自己的功能.
板上还包括灵活的端口复用切换,使得用户可以根据不同场合使用不同的端口配置,最大的利用CPU各种功能.
板卡通过标准接口提供电源输入,采用单5 V的供电方式,注意供电电流需要大于1安培,电源调节模块为微处理器及其他外设提供3.3 V和1.04/1.2 V(对应不同频率CPU)电压.
在使用该系列板卡开发过程中可以通过J1接口连接仿真器.
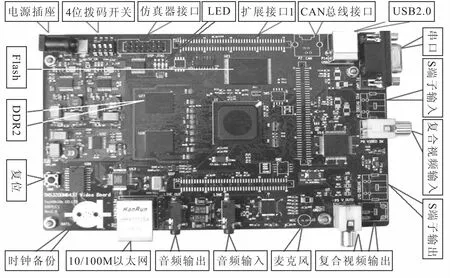
图4 开发板实物图
2 软件设计
2.1 简述
该系统使用TDS510USB Plus V3仿真器,采用CCSV3.3编译开发环境,基于VLIB算法库的程序设计.用高斯背景模型检测运动物体,提取该物体做为目标模型开始对运动物体进行追踪,用卡尔曼滤波器预测物体可能处在的位置,以预测结果做为起始点,用均值漂移迭代得到物体的实际位置,和MeanShift算法结合实现目标跟踪.目前,实现目标跟踪的方法很多,根据被跟踪目标的不同特征,可以分为:基于点特征[6]的、基于颜色[7]的、基于视图[8]的、基于区域[9]的和基于形状[10]的等.
2.2 软件系统设计流程图
系统软件设计思路如图5所示.
3 实验情况
用该硬件平台搭建一套智能跟踪系统,用遥控小车模拟运动目标,在液晶显示器上进行显示.跟踪效果如图6所示.
该模型是在彩色空间建立的,因此使用不同颜色的遥控小车在不同颜色的地面做测试,在地面上划出一块区域,控制小车从各个不同方向进入并驶离该区域,如果镜头可以跟踪直至小车驶离该区域就认为成功,否则为失败,测试10次,统计结果如表1所示.
由表1可见,小车与背景在RGB色彩空间中反差很大时,跟踪的效果好.而当小车与背景在RGB色彩空间中的反差很小时,跟踪的失败率就会很高.

图5 系统软件设计流程图

图6 运动目标跟踪效果图

表1 不同颜色背景下的小车跟踪成功率统计表
这是因为均值漂移算法中使用的模型是RGB彩色模型,均值漂移算法又是搜索局部极小值的算法,当背景与运动物体差异小时,容易得到错误结果.在下一阶段研究中,将着重提高背景与运动物体差异小时的跟踪成功率.
4 结语
该系统采用TI的达芬奇系列DM6437为平台,提出了一种硬件成本低廉的、基于颜色信息的实时目标视觉跟踪系统,该系统利用颜色信息、形状信息等来识别环境目标.通过该系统可以学习均值漂移和卡尔曼滤波器等相应的算法,结合实物可以验证系统的实时效果,具有一定的实用性.
[1] COLLINSR.A system for video surveillance and monitoring:VSAM finalreport[C].Carnegie Mellon University,Technical Report:CMU-RI-00-12,2000.
[2] HARITAOGLU I,HARWOOD D,LARRY S.W4:real-time surveillance of people and their activities[J].IEEE Trans Pattern Analysis and Machine Intelligence,2000,22(8):809-830.
[3] 赵渊.基于DM6437的视频目标跟踪算法实现与优化[D].成都:电子科技大学,2010.
[4] 乔坤,郭朝勇,史进伟.基于卡尔曼滤波的运动人体跟踪算法研究[J].计算机与数字工程,2012,40(1):1-3.
[5] 肖传毅.基于DM6437的视频行人运动检测系统设计[D].南京:南京理工大学,2012.
[6] ISARD M,BLACK A.Condensation-conditional density propagation for visual tracking[J].Int J on Computer Vision,1998,1(29):5-28.
[7] LIU T L,CHEN H T.Real-time tracking using trust-region methods[J].IEEE Transactions on Pattern Analysis and machine Intelligence,2004,26(3):397-402.
[8] LIPH,ZHANG TW,ARRHUR ECP.Visual contour tracking based on particle filters[J].Image and Vision Computing,2003,21(1):111-123.
[9] LIPTON A,FUJIYOSHE H,PATIL R.Moving target classification and tracking form real time video[J].In Proceedings of theWorkshop on Application of Computer Vision,Princeton,1998,25:47-58.
[10]BLACK M J,JEPSON A D.Eigentracking:robustmatching and tracking of articulated objects using a viewbased representation[J].In Proceedings of European Conference Conference on Computer Vision,Cambridge UK,1996,26:329-342.
[责任编辑王新奇]
The Intelligent Target Tracking System Based on DM 6437 Hardware Platform
LIUWei
(Department of Electrical Engineering,Tongling Vocational and Technical College,Tongling 244061,China)
With DM6437 hardware platform as the core,this study proposes a design of intelligent target tracking system in terms of the components,characteristics,structure,function of the hardware and the design process of software.The tracking performances under different environments have been tested and further possible improvements are also given.The design features low hardware cost,easy implementation of algorithm and practicality.
target tracking;DM6437;mean shift;Kalman filter
TN850.6
A
1008-5564(2015)02-0037-05
2014-12-15
刘 伟(1968—),男,安徽淮南人,铜陵职业技术学院电气工程系副教授,高级工程师,主要从事DSP技术及应用研究.
