外挂式矿难救援机器人设计
2015-05-30杜微孙雅萍孟艳萍
杜微 孙雅萍 孟艳萍
摘 要:外挂式矿难机器人设计是为了解决目前在矿难发生时出现的救援问题:二次塌方,有毒气体等。机械结构设计采用履带结构,履带对地形适应能力很强。行进机构采用双履带结构,利用驱动履带实现行进运动,利用爬坡履带实现破路爬行运动,机器人上有托举机构,可以在搜索到遇难人员时,进行托举救援。
关键词:矿难机器人救援托举机构
中图分类号:TP242 文献标识码:B 文章编号:1006-8937(2015)35-0016-02
1 背景概述
工业的发展离不开资源,绝大部分的资源来自于矿产的开发。随着资源需求量的增大,矿产的开发也被进一步的扩大。矿产在为工业现代化作出重大贡献的同时也伴随着的矿难事故的发生率急剧上升。据不完全统计,就煤矿矿难自2001~2014年以来,我国共发生煤矿遇难30 494起,死亡人数52 348人,平均每起死亡人数1.72人;其中重大事故498起,死亡人数11 723人,平均每起23.54人。给国家和个人带来了极大的损失和伤害。造成死亡的主要原因是瓦斯爆炸和采空导致的煤矿坍塌,工作人员被困而得不到及时的救助。
矿难死亡率人数的众多表示在发生矿难时救援困难重重而无法及时搜救,主要表现在挖掘救援通道时有可能造成二次坍塌,给救援人员带来危险;再者矿下情况复杂,遇难人员无法准确定位。在这种紧急而危险的情况下,使用一种可以替代救援人员,及时、迅速深入矿难现场进行侦查、探测并实施搜救的救援机器人,即可以减少救援人员的危险,也可以提前发现受灾人员及时施救,这对于救援工作有着极其重要的意义。
2 机械结构
设计矿难机器人的目的是为了解决在矿难发生的复杂环境里帮助因受灾而导致的昏迷人员成功逃脱的技术问题。
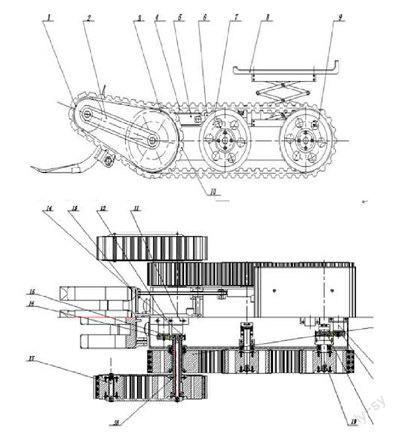
其机械结构如图1所示。
所设计的矿难搜救机器人包括行走机构、摆臂机构、翻斗机构和升举机构。行走机构设计成履带式可以适应复杂的矿下地形;摆臂机构增大了机器人的爬坡越障功能;翻斗机构可以救援已经昏迷的遇难人员;升举机构,可以把遇难人员托举出救援通道。
其中行走机构包括行走驱动电机、行走减速齿轮组、行走驱动轴、行走传动机构。行走驱动电机通过联轴器与行走减速齿轮组连接;行走减速齿轮组是通过齿轮啮合、联轴器与行走驱动轴连接;行走驱动轴与行走传动机构连接;行走传动机构通过行走驱动轮的转动带动行走履带、支重轮和行走转向轮一起转动,完成行走任务。
摆臂机构包括摆臂电机、摆臂驱动电机、摆臂减速齿轮组、摆臂驱动轴、套筒、摆臂传动机构和摆臂连接杆。摆臂电机和摆臂驱动电机分别通过联轴器与摆臂驱动轴和摆臂减速齿轮组连接;摆臂减速齿轮组是通过齿轮啮合、联轴器与套筒连接;套筒与摆臂传动机构通过键固定连接;摆臂传动机构通过摆臂驱动轮的转动带动摆臂履带和摆臂转向轮一起转动,使摆臂与行驶履带共同行进。这样的设计可以增大机器人的驱动和底面的适应能力。摆臂驱动轴与摆臂驱动连接杆连接;摆臂驱动连接杆与摆臂转向轮连接,这样使摆臂可以绕着驱动回转轴摆动相应的角度,以适应坡路行驶。
翻斗机构由电动推杆、翻斗连杆和救援铲组成。电动推杆与翻斗连杆连接;翻斗连杆与救援铲连接,电动推杆的运动是往复移动,通过连接杆可以使救援铲对昏迷人员实行救援工作。救援铲通过翻转运动把被救援人员安全的放到升举机构上。
升举机构由升举电机和连杆组组成。升举电机通过联轴器与丝杠连接,丝杠和螺母组成螺旋副,当丝杠转动时便带动螺母在丝杠上实现左右移动,螺母与连杆组固定连接,带动连杆组运动。连杆组是通过转动副连接的连交叉接杆,在螺母的推动下实现上下运动,把遇难人员通过安全通道送到安全位置。
3 控制系统设计
机械结构给了机器人骨架,控制系统部分则给了机器人动起来能量。控制体统为机器人的结构提供了驱动力,使机器人可以灵活的运行。完善的电气设计保证机器人良好的运转。针对机器人各个部位不同的驱动需求设计与之匹配的驱动电路。
控制系统包括电机的控制模块设计、行走蔽障模块设计、人体红外感应模块设计、无线遥控模块设计、供电系统设计和位姿控制模块设计。
其中位姿控制模块设计非常重要,它能准确报告机器人的位置,同时机器人在执行任务时,需要实时测量和估算机器人本体的侧倾角、前倾角等姿态信息,以说明控制系统完成越障、避障动作,并保证机器人不发生倾覆等不安全事故。
4 结 论
矿难搜救机器人的设计和使用可以替代救援人员,及时、迅速深入矿难现场进行侦查、探测并实施搜救救援机器人,即可以减少救援人员的危险,降低了救援时的劳动强度,也可以提前发现受灾人员及时施救,这对于救援工作有着极其重要的意义。
参考文献:
[1] 宋继祥,李全军,刘益辉,等.地震多功能救援机器人设计[J].机电产品 开发与创新,2011,(9).
[2] 王鹏,李鑫,汪文浩.地震搜救机器人构型设计综述[J].哈尔滨理工大 学学报,2012,(2).
[3] 王红军,魏超.一种地震搜救机器人运动结构设计研究[J].北京信息 科技大学学报,2010,(9).
