全站仪在导线测量中的应用
2015-05-30梁臣艺张载标张民英
梁臣艺,张载标,张民英
(1.中信大锰矿业有限责任公司大新锰矿分公司,广西 大新 532315;2.广西建工集团第二建筑工程有限责任公司,广西 南宁 530001)
导线测量主要是指外业测量角度、导线边长以及高程,然后内业计算导线点坐标的过程。测区的范围内相邻控制点之间连成直线而构成的连续折线称为导线边。导线测量主要用于带状地区、隐蔽地区、城建区、地下工程、公路、铁路等控制点的测量。导线的布设具有形式灵活、测量精度高等特点,主要有附合导线、闭合导线、支导线,导线网4种导线测量方法。多年来,导线测量不仅在测绘、建筑工程、交通与水利工作、地籍与房地产中大显身手,而且在大型工业生产、构件装调以及体育竞技等领域也得到应用[1]。
1 传统的导线测量
传统的导线测量是通过观测导线边的边长和转折角,经计算获得导线点的平面坐标,一般包括内业和外业两大部分的工作。首先是外业工作,主要工作有:踏勘选点,建立标志,测量边长和角度;然后是内业计算工作,计算前认真检查外业记录,需满足规范限差要求。这个阶段的工作有:角度闭合差的计算与调整,推算导线各边的坐标方位角,计算各导线点的坐标值。
1.1 传统导线测量的计算
以附合导线为例,如图1所示,A、B、C、D是已知点,利用已知坐标计算出起始边的方位角αAB和终止边的方位角αCD。
1)准备工作
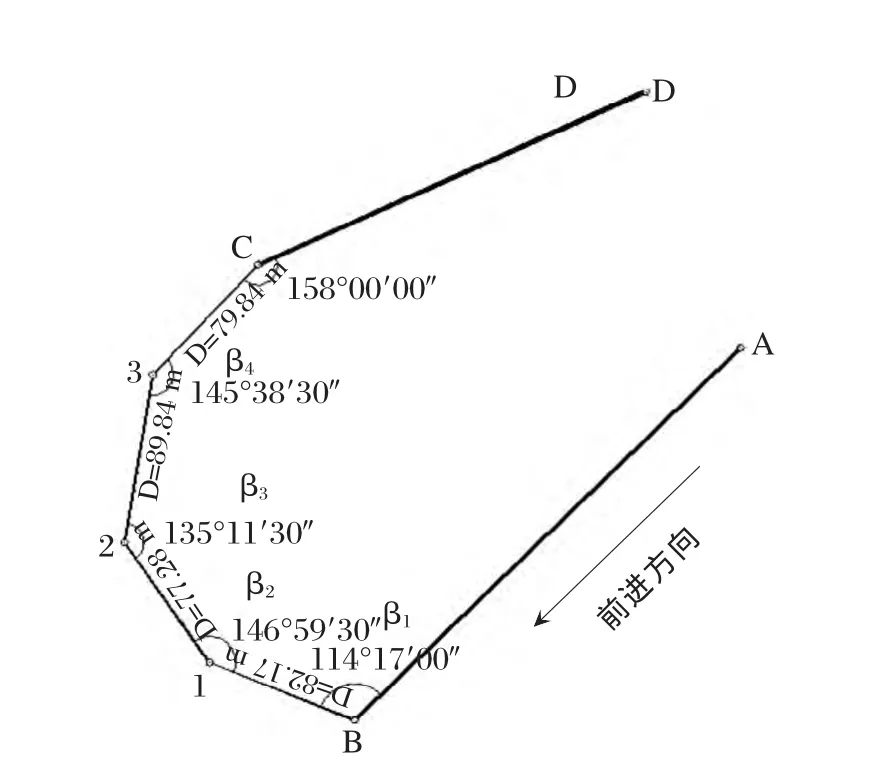
图1 传统导线测量
外业工作主要是踏勘选点及建立标志、测量水平角β、测量导线边长d;内业计算主要是由水平角β计算方位角α;再由方位角α及边长d,计算坐标的增量(△x,△y),最后算出各导线点的坐标(x,y)。
2)角度闭合差的计算与调整
由于观测角度在实际操作时存在误差,使得实测点C'最后不能完全附后到已知点C上,从而产生角度闭合差fβ,即:fβ= α'CD- αCD。如果fβ≤f容,即不大于规范的允许值,说明角度符合要求,可以进行调整,否则重新测量;调整方法采取反符号平均分配的原则,角度改正数为:vβ=-fβ/n;改正后的角度:β'n= βn+vβ。
3)计算出各边的坐标方位角
根据起始边的已知坐标方位角及改正后的水平角,按下面公式计算其他各导线边的坐标方位角:α前=α后-180(°)+β左。例如,B-1的方位角为:αB1=αAB-180(°)+β'1。
4)计算各导线点的坐标增量

5)坐标增量闭合差的计算与调整
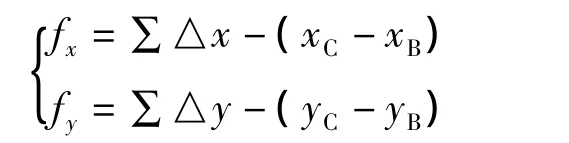
附合导线纵、横坐标增量代数和的理论值应为:

式中∑△x,∑△y分别为导线各边纵、横坐标增量的总和,但由于在实际操作中都会存在误差,从而产生横坐标增量fx、纵坐标增量fy,计算公式为:
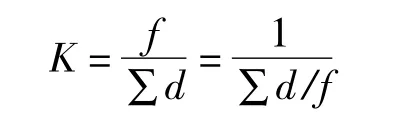
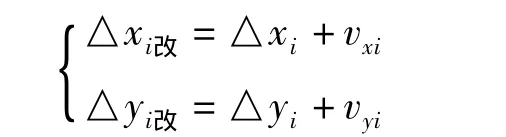
如果K值不大于允许值,说明成果符合精度要求,可以进行调整,即将fx、fy反号按与边长成正比的原则分配到各边的纵、横坐标的增量中去,以vxi,vyi来分别表示第i边的纵、横坐标增量改正数,即:

6)利用下面公式计算改正后的坐标增量
7)各导线点改正后的坐标计算
根据起点已知坐标及改正后的各边坐标增量,用下列公式依次推算1、2、3的坐标:

例如,导线点1的计算过程为:

依次计算出其他各点的坐标。
1.2 传统导线测量的计算实例
如图1,A、B、C、D 是已知的点,把外业观测导线边长和水平角等数据填入表中,按上述的步骤和公式计算即可,数据见表1。
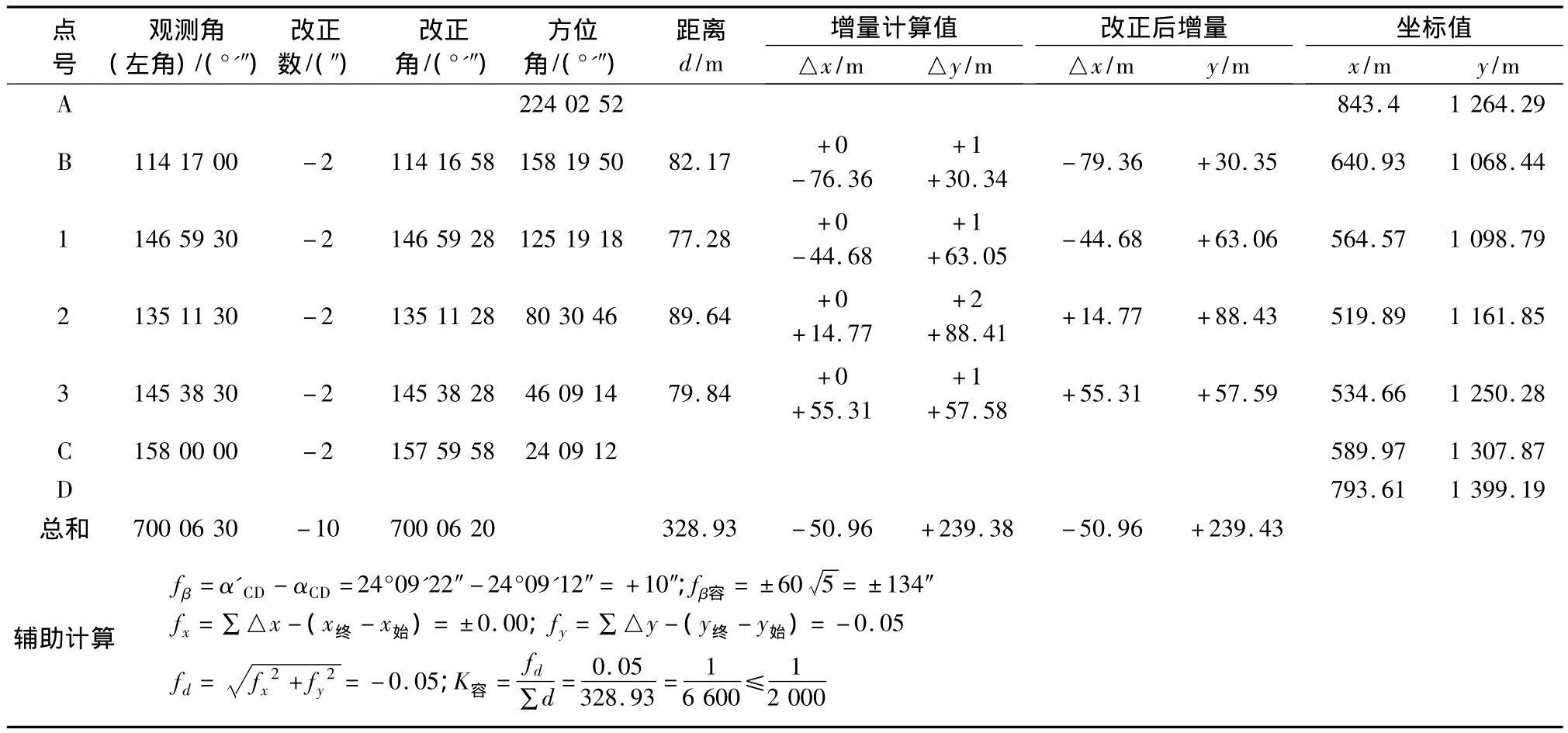
表1 传统导线测量的计算结果
2 全站仪坐标导线测量
全站仪是把光电测距仪、电子经纬仪、微处理机合为一体的仪器,具有自动化测量三维坐标与采集数据的功能,他可以通过机内的微处理机完成测站上的全部测量工作,自动化程度高,测量快,精度高,性能稳定。成果处理时可以采用坐标平差法,边长分配法,增量分配法,改进的边长分配法[2]。目前先进的全站仪均可以直接测算出导线点的三维坐标(平面坐标和高程)[3]。下面以全站仪坐标导线为例说明其测量方法。
2.1 全站仪导线测量的基本原理
为了方便与传统导线测量比较,同样采用附合导线为例,如图2所示,A、B、C、D 4个点为已知坐标点,中间1、2、3为各待测的点。

图2 全站仪坐标导线
首先将全站仪安置于B点,对中整平,利用全站仪内置的坐标测量功能和微电脑记忆功能输入B点名和坐标;设置后视点,输入A点名和A坐标,瞄准A,按设置键,使此时水平盘的度数显示为B—A的方位角;旋转度盘,测量导线点1的坐标,即可得出点1的坐标并存盘;然后仪器搬至1点,按照同样方法输入测站点名1,将点B做为后视点,后视点输入B,瞄准B,按设置键,使水平盘的度数显示1—B的方位角,旋转度盘,重复测量下个控制点。以此类推,按以上步骤继续不断测记新导线点2、3坐标。可见,全站仪导线测量的形式实际上为三维支导线,将自动地显示各导线点的三维坐标,并记录。
其仪器计算原理为[4]:


式中S——全站仪至反射棱镜的斜距,m;
θ——全站仪至反射棱镜的竖角,(°'″);
H——高程,m;
i——为仪器高,m;
v——棱镜高,m;
α——测站点 B 至目标点1 的方位角,(°'″)。
2.2 导线的近似坐标平差计算
由上述可知,全站仪可实现快速测量,并实时地自动计算、显示和储存各点的三维坐标,所以平差计算就不用像传统导线测量那样计算,全站仪导线采用坐标平差计算,方法更简便。坐标平差是已经成型的平差方法[5],有关的原理、计算方法在很多文献中都有推导和论证。坐标平差法计算步骤如下。
图2所示的附合导线,由于存在误差,最后测得的C'点坐标(xC',yC')与 C点已知坐标(xC,yC)不一致,其C'点与C点的纵、横坐标的差值即为纵、横坐标增量的闭合差fx,fy,利用闭合差,可以求出导线全长闭合差f,导线全长相对闭合差k(计算方法参照文中1.1传统导线测量)。此时K若满足导线精度的要求,坐标改正值按与距离成正比平差法改正。坐标增量的误差并非与坐标增量的绝对值成正比,而是与导线边长成正比,此方法在有关文献中采用较多,在文献[4]有推证其合理性。方法就是将坐标增量闭合差fx,fy反号与边长di成正比的方法分配到每个导线点上,所以改正后各导线点的坐标(xi,yi)为:
式中xi',yi'为全站仪外业直接观测的导线点的坐标,d为各观测的导线长度。
2.3 全站仪坐标导线测量计算实例
全站仪坐标导线测量和计算数据见表2。

表2 全站仪附合导线平面坐标计算
导线边长的总长∑d=328.975 3,导线全长相对闭合差f=0.026 4,K=1/14 023.408 4 <1/4 000满足精度要,可进行平差计算。
2.4 高差闭合差的计算与调整
全站仪测高程的原理为三角高程,规范中要求相邻两点高差值需对向观测,在两者的差值不超限的情况下取绝对值的平均值[6]。如在B点上架站时,对准前视点1,取观测3次数据的平均值作为1点的高程。依此方法,测量后面各点的高程。
高差闭合差的计算与调整,其方法实质与坐标平差方法一样。如图2所示,从已知点B出发,由于存在测角和测距误差,测得的C'点高程不等于C点的已知高程,从而产生高差闭合差,即fh=HC-。如果fh≤fh容,则外业成果达到精度要求。可以利用公式对高程进行改正,即:

全站仪导线测量高程的误差与导线边长近似成正比关系,因此对全站仪导线测量的高程进行近似平差的计算与坐标平差方法一样,高程闭合差按边长正比例反符号分配。
3 结语
通过比较这两种方法在测量导线中的应用可知,传统的导线测量工作量大,人工计算繁琐,容易出错;全站仪导线测量则不用角度闭合差的计算,直接根据仪器测量的坐标,进行近似坐标平差后,就可以得出坐标,计算过程只有1个步骤提高了工作效率。在一般低等级控制测量中,若计算闭合差在容许值范围内,进行近似坐标平差后,求得各待测点的最终坐标和高程,可满足精度要求,在工程上可广泛使用。
[1]潘正风,杨正尧.数字测图原理与方法[M].武汉:武汉大学出版社,2002:181-195.
[2]杨丽,朱云锋.全站仪坐标导线测量及平差方法的比较[J].山西建筑,2007,33(6):353 -354.
[3]李全明.全站仪坐标导线测量和近似平差计算方法探讨[J].山西建筑,2001(5):159-160.
[4]郭宗河,郑进凤,贺可强.全站仪导线测量若干问题的探讨[J].合肥工业大学学报(自然科学版),2010(2):266-268.
[5]何玉兰.全站仪导线测量工程流程及若干问题的探讨[J].商品与质量:建筑与发展,2012(2):80-80.
[6]黄艳立,高怡.全站仪导线测量数字化研究[J].河南城建学院学报,2009(4):49 -52.
