基于微光像增强器的偏振成像系统设计与实验
2015-05-29茹志兵李双全张晓亮邹程帅张奇贤
茹志兵,刘 冰,李双全,张晓亮,邹程帅,张奇贤
(1.西安应用光学研究所,陕西 西安710065;2.微光夜视技术重点实验室,陕西 西安710065)
引言
光波是一种电磁波,包含电场分量和磁场分量两部分,光学中把电场分量称作光矢量。光在传播过程中,光矢量的大小和方向以一定规律变化,那么这种变化的光则叫做偏振光。偏振性是光的重要特征之一,菲涅尔反射定律表明:非偏振光束遇到光滑表面,反射后将产生部分偏振光。光波经物体表面反射后,根据表面结构、纹理以及入射角度,其偏振状态将发生改变,不同物体或同一物体的不同状态(例如粗糙度、空隙度、含水量、构成材料的理化特性等)产生不同的偏振,不少物体都有自己独特的偏振特征[1-2]。
一般的成像技术只探测一定波段的强度,偏振成像获取的目标信息不仅有光强、光谱,还增加了目标的偏振度、偏振相角等。采用偏振成像技术探测,对于探测或识别伪装目标或处于复杂自然环境下的人造目标也具有一定的意义。目前,在微光偏振成像领域,国外研究起步较早,主要有:Taylor最早搭建了一套微光电视系统实现了偏振光在空域和时域的测量;Azzam等利用4个探测器光子偏振仪测量了给定误差条件下3个归一化的斯托克斯矢量的均方误差,并通过实验研究了入射光束能量变化对测得的斯托克斯矢量的准确度影响;Gamiz研究了微光条件下4通道偏振成像系统的性能,分析了探测噪音对两束正交光强、偏振位相延迟估计带来的影响。Sean Moultrie等基于孔径分割技术设计了一套可用于微光条件下的可见光偏振成像系统,并给出了系统结构及实验结果。Clemenceau搭建了806nm的激光偏振主动成像系统[3-4]。国内对红外偏振研究较多,西安应用光学研究所、昆明物理研究所、长春理工大学、安徽光机所、解放军电子工程学院等,研究了目标红外偏振特性、红外偏振成像的技术方案以及应用,对微光偏振成像系统有借鉴作用;南京航空航天大学研究了利用偏振激光和CCD图像处理,得到旋光器件旋光角度,北京航空航天大学研究了大气的偏振激光后向散射情况,国防科学技术大学研究了利用激光照射和物体表面散射光偏振差异的目标识别技术[5-7];在微光偏振成像系统方面,北京理工大学陈振跃等研究了基于高灵敏度CCD的孔径分割偏振成像系统,实验表明能够提高成像对比度[3]。本文基于分时型偏振成像原理,设计了一套微光偏振成像系统,在微光条件下,对静态场景和目标进行了实验,对图像进行了处理,验证了微光偏振成像在复杂环境下识别人造目标的优势。
1 偏振成像原理
为表征偏振光的各种偏振态,Stokes引入如(1)式所示的4个向量参数S=[I,Q,U,V]T来描述偏振信息,每个向量参数都是光强的时间平均值(时间间隔长到可以测量),所描述的信息便于用各种成像设备间接或直接测量到,并且测量方式简便容易实现[8]。
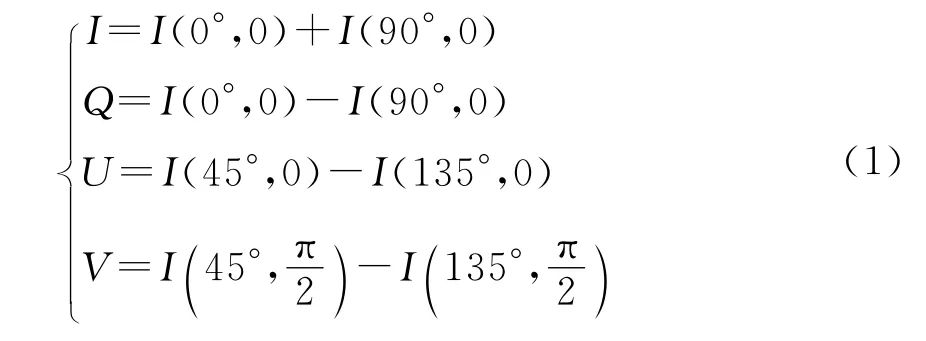
式中:I为光波强度;Q 与0°、90°方向的线偏振有关,可以表示为x与y方向上的光强差;U 与45°、135°方向上的线偏振有关,可以表示为±π/4两个方向上的光强之差;V则与圆偏振中左旋与右旋的方向相关,可以表示为椭圆偏振。
实际偏振探测中往往不用相位延迟器,只靠旋转线偏振片即可得到所求Stokes参量[9],因此,偏振光的线偏振度DoLP和偏振相角Orient可以简化为[8]
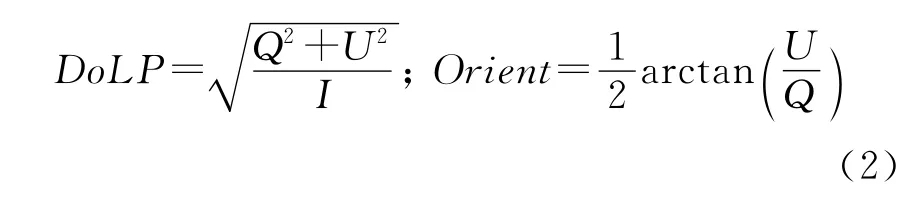
式中:线偏振度DoLP是指线偏振光占全部光的比例;偏振相角Orient是指偏振方向与入射面之间的夹角,是一个由物体本身固有属性决定的特征信息,可以用它来表征目标及其背景的状态特征[10]。
线偏振度DoLP和偏振相角Orient的图像都是重要的偏振信息源。测量并分析它们的图像特征可以得到重要的特征数据。同时,还可以将DoLP、Orient、I、Q、U 等图像进行组合、融合及伪彩色增强,以便进一步提高识别概率。
2 设计思想
微光偏振成像系统设计主要包含3个技术环节:1)对景物光波的偏振态分解、扫描、角度编码,从探测器的光强响应中解算出景物光波的偏振信息;2)把景物光波的偏振信息进行可视化显示;3)提取目标特征[11]。偏振成像实现方法,按照同一像素偏振分享获取方式划分,主要有分孔径偏振成像、分振幅偏振成像、分时偏振成像和分焦面偏振成像[12]。
微光偏振成像系统设计过程中,由于夜天光下照度较低,并且偏振片的透过率为43%左右,到达像增强器靶面的照度只有原来的43%左右,需增加半导体激光辅助照明,提高微光像管接收到的光强。
微光偏振成像系统采用主动式分时偏振成像模式设计,如图1所示,在微光电视之前放置偏振片,利用偏振片进行多次采集,求取斯托克斯矢量的各参数。采集时,改变连续偏振片输入光的透射方向,偏振片的转动角为0°、45°、90°和135°,那么通过偏振片的4个不同角度偏振光,求取斯托克斯矢量I、Q和U3个参数,此时认为V为0,所以不需要线形延迟器。

图1 微光偏振成像系统组成示意图Fig.1 Diagram of LLL polarization imaging system
3 系统设计
探测器选用国产三代像增强器,其灵敏度:1 700μA/lm;分辨力:48lp/mm;增益:10 000;等效背景照度:2.2×10-7lx;信噪比:28。CCD选用DMM 22BUC03-ML,其分辨力:744像素×480像素;像素大小:6.0μm×6.0μm;靶面尺寸:1/3″;帧率:30fps;最低照度:0.02lx。
3.1 物镜设计
微光偏振成像系统为微弱光成像,设计了大口径微光物镜(图2),焦距:102.4mm;视场:±5°;F 数:1.7;有效口径:60.5mm。

图2 大口径微光物镜示意图Fig.2 Schematic of objective lens with 60.5 mm aperture
物镜设计时考虑了三代像增强器的光谱响应范围主要在500nm~1 000nm,采用Petzval物镜结构,玻璃材料采用了 H-BaK6、H-ZF6、H-ZK7等。根据像增强器的响应曲线,选取546.1nm、706.5nm、852.1nm 波长作为消像差谱线,物镜中的2个胶合物镜均为正光焦度,材料分别为HBaK6/H-ZF6和 H-ZF6/H-ZK7,正透镜用冕牌玻璃,负透镜用火石玻璃,2种玻璃的阿贝数相差较大,前组阿贝数相差33.2,后组阿贝数相差33,有利于消色差,且2组胶合透镜分开一定距离,有利于校正球差、彗差、像散,在靠近像面的地方加入负场镜,用来校正场曲和畸变。物镜调制函数(MTF)如图3所示。典型空间分辨力下的MTF值如表1所示。
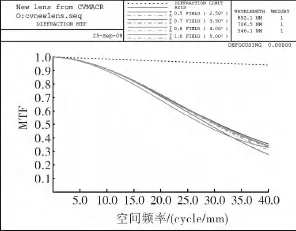
图3 物镜的MTF特性曲线Fig.3 MTF curve of objective lens

表1 物镜典型的MTF值Table 1 Typical MTF values of objective lens
3.2 中继透镜设计
中继透镜主要实现微光像增强器与数字CCD的光学耦合,如图4所示,焦距:26.3mm;F 数:1.98;物距:36.8mm;像距:8.64mm;总长:72.7mm。
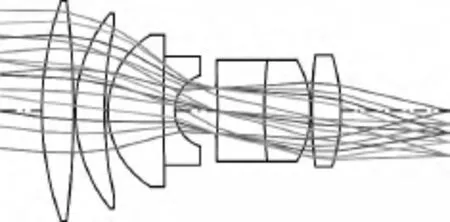
图4 中继镜头示意图Fig.4 Schematic of relay lens
考虑到系统对比度传递特性和分辨力参数对ICCD的性能影响重大,设计选择中继镜头的耦合途径,重点考虑MTF指标,其设计性能曲线如图5所示,典型视场下的MTF值如表2所示。
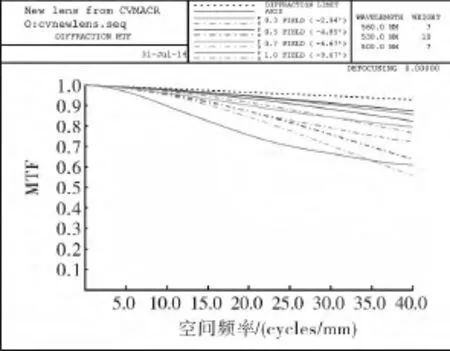
图5 中继镜头的MTF性能曲线Fig.5 MTF curve of relay lens
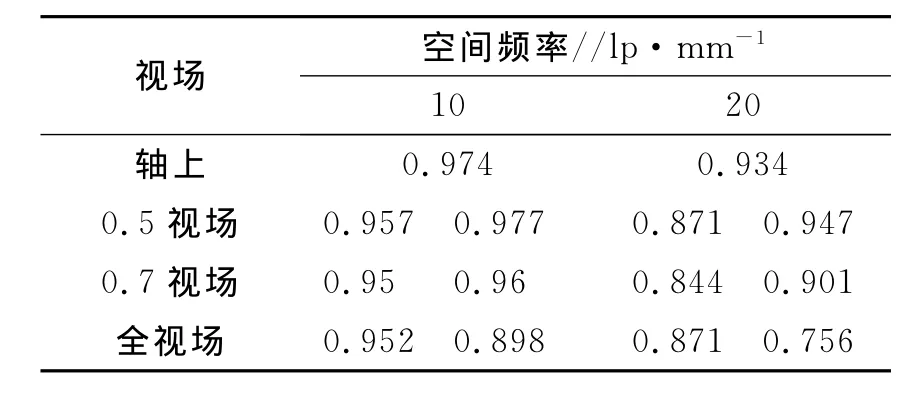
表2 中继镜头的MTF计算值Table 2 Typical MTF values of relay lens
3.3 图像采集与处理
计算机采集目标不同偏振态图像后,将I(0°,0)、I(45°,0)、I(90°,0)、I(135°,0)的图像灰度值代入(1)式,通过Matlab得到Stokes参数I、Q、U,并根据(2)式得出线偏振度DoLP和偏振相角Orient,并合成偏振度图像,偏振度图像中每个像点的灰度值仅与该像点的偏振度有关[13],不同材料表面、不同探测角的偏振度图像有显著的差异,表现为各个像点亮度的不同,计算流程[14-15]如图6所示。
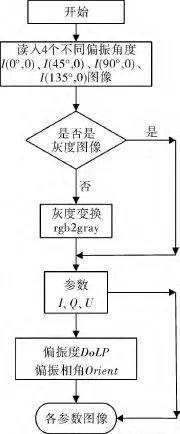
图6 计算流程Fig.6 Flow chart of calculation
4 系统及性能实验
4.1 设计结果
通过系统总体设计、光学设计和图像处理系统设计,完成的微光像增强器的偏振成像系统如图7所示。

图7 微光偏振成像系统实物图Fig.7 Schematic of LLL polarization imaging system
4.2 系统实验
在室内进行了实验,具体步骤为:1)在暗室内,把绿色植物和某型光电仪器放置在大口径准直透镜的焦面处,微光偏振成像系统放置在透镜后方;2)对目标进行辅助照明,调节激光器功率,使获得图像清晰;3)旋转偏振片,获得不同相位的偏振图像,存至计算机;4)进行图像处理,获得目标偏振度和偏振相角。采集图像如图8,经过Stokes公式计算得到图9。
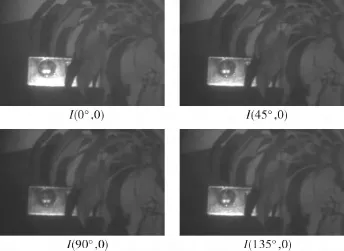
图8 实验室采集图像Fig.8 Images captured in lab
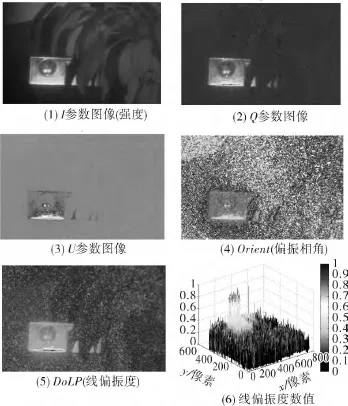
图9 实验室Stokes参数图像Fig.9 Stokes parameter image in Lab
在无月星空下,对涂绿漆的金属罩子、迷彩头盔/迷彩服进行了微光偏振成像试验,实验步骤同室内实验步骤的2~4,图10为试验目标,图11为野外采集图像,图12为Stokes参数图像。

图10 野外实验目标Fig.10 Testing target in field
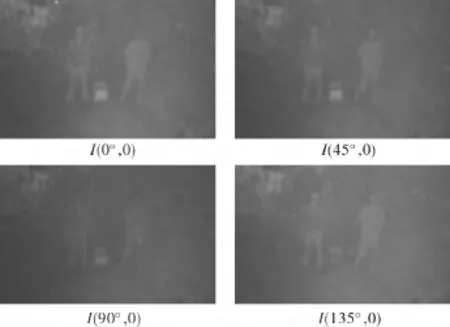
图11 野外试验采集图像Fig.11 Images captured in field
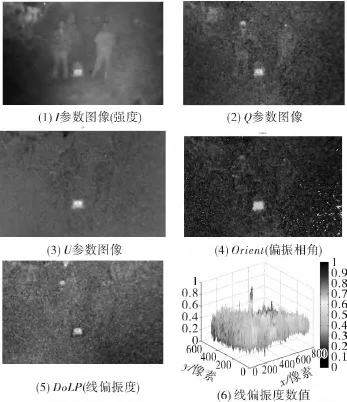
图12 野外试验Stokes参数图像Fig.12 Stokes parameter image in field
采集的图像经过计算后,有光滑表面的目标的普通图像,在图11中I(0°,0)图像目标灰度均值(归一化)为0.27,背景灰度均值(归一化)为0.20,灰度值之比为1.35,图12中Dolp图像目标灰度均值(归一化)为0.36,背景灰度值(归一化)为0.16,灰度值之比为2.25。参数I(强度)图像比原图像对比度加强,且线偏振度DoLP图像和偏振相角Orient图像都表现为有光滑表面的金属目标较亮,而自然背景相对较暗,这给目标检测带来了极大的便利。
5 结论
实验结果表明,采用激光照明、微光偏振成像方式能够提高人造目标和自然背景的对比度,使人造目标能够轻松识别出来,提供了识别杂乱自然背景中人造目标的手段,比简单使用光强识别目标的方法有更高的效率。这一特性使之可以应用在夜间搜救方面,或者对隐藏的、伪装的军事目标进行探测识别。
为了能够对变化的场景或移动的目标进行偏振成像,下一步需进行分孔径、分振幅、分焦面的微光偏振成像研究,并且进行实时计算,使Stokes参数图像、线偏振度DoLP图像和偏振相角Orient图像实时显示,从而实时地获取更多的目标信息。
[1] Nie Jingsong,Wang Zhen.Summarize of infrared polarization imaging detection technology[J].Infrared Technology,2006,28(2):63-67.聂劲松,汪震.红外偏振成像探测技术综述[J].红外技术,2006,28(2):63-67.
[2] He Yi,Wu Jian,Liu Shenggang.Theoretical study of laser scattering from rough surfaces[J].Acta Optica Sinica,1997,17(9):1202-1208.何毅,吴健,刘盛纲.粗糙表面激光散射特性的理论研究[J].光学学报,1997,17(9):1202-1208.
[3] Chen Zhenyue,Wang Xia,Ma Bin,et al.Low light
level polarization imaging system design and experiment[J].Acta Photonica,2014,43(4):0411003-1-0411003-5.陈振跃,王霞,马斌,等.微光偏振成像系统设计及实验[J].光子学报,2014,43(4):0411003-1-0411003-5.[4] Clemenceau P.Polarization active imaging at 806nm[R].Aerosense:[s.n.],1999.
[5] Jiang Qi,Xu Guili,Li Kaiyu,et al.Angle measurement based on optical polarization beam imaging[J].Journal of Applied Optics,2011,32(5):931-936.蒋琦,徐贵力,李开宇,等.基于偏振分束成像的旋光角度 场 测 量 技 术 [J].应 用 光 学,2011,32(5):931-936.
[6] Zhao Jizhi,Jiang Yuesong,Lu Xiaomei,et al.Polarized laser backscattering of atmospheric clouds distribution[J].Journal of Applied Optics,2011,32(5):1037-1043.赵继芝,江月松,路小梅,等.大气云层分布的偏振激光后向散射研究[J].应用光学,2011,32(5):1037-1043.
[7] Li Quan,Liu Zejin,Shu Bohong,et al.Application of polarization diversity in active imaging[J].High Power Laser and Particle Beams,2005,17(3):351-354.黎全,刘泽金,舒柏宏,等.利用表面散射光偏振差异的目标识别技术[J].强激光与粒子束,2005,17(3):351-354.
[8] Zhao Yongqiang,Pan Quan,Cheng Yongmei.Imaging spectropolarimetric remote sensing and application[M].Beijing:National Defense Industry Press,2011:28-39.赵永强,潘泉,程咏梅.成像偏振光谱遥感及应用[M].北京:国防工业出版社,2011:28-39.
[9] Wang Jun,Ding Na,Li Jianjun et al.Infrared polarization imaging:detection and recognition of camouflage target[J].Journal of Applied Opitcs,2012,33(3):441-445.王军,丁娜,李建军,等.红外偏振成像对伪装目标的探测识别研究[J].应用光学,2012,33(3):441-445.
[10]Qin Qiao.Study on image of infrared polarization[D].Changchun:Changchun University of Science and Technology,2012.秦骁.红外偏振光成像研究[D].长春:长春理工大学,2012.
[11]Xu Canjun,Zhao Jinsong,Cai Yi,Feng Shengrong.A summary of the mechanism of infrared polarization imaging[J].Infrared Technology,2007,29 (7):381-385.徐参军,赵劲松,蔡毅,冯生荣.红外偏振成像机理概述[J].红外技术,2007,29(7):381-385.
[12]Azzam R M A.Mueller-matrix ellipsomerry,a review[J].SPIE,1997,3121:396-405.
[13]Tang Ruoyu,Yu Guoping,Wang Xiaofeng.Acquisition method of polarization image in natural lighting environment[J].J.Wuhan Univ:Nat.Sci.Ed.,2006,52(1):059-063.唐若愚,于国萍,王晓峰.自然光照下偏振度图像的获取方法[J].武汉大学学报:理学版,2006,52(1):059-063.
[14]Cornell S,Chun L,Firooza S.Target recognition study using polarimetric laser radar[J].SPIE,2001,5426:274-284.
[15]Dong Hanqian,Yu Guoping,Peng Qinhua.Object detection through polarization characteristics[J].J.Wuhan Univ.:Nat.Sci.Ed.,2006,52(1):198-208.董汉钱,于国萍,彭钦华.基于偏振特征的目标检测[J].武汉大学学报:理学版,2006,52(1):198-202.
