船载光电转台设计及特定环境下可行性分析
2015-05-29邱亚峰
张 雷,邱亚峰,曹 源
(南京理工大学 机械工程学院,江苏 南京210094)
引言
船载光电转台主要应用于国家边海防建设,是典型的光机电一体化的实践应用。目前国外比较有名的船载光电转台有美国的FLIR System公司的Sea FLIR,法国的VIGY-10fi侦查监测系统等;国内船载光电转台的研究起步较晚,本文根据技术指标要求,设计出船载光电转台。由于海面风力、海浪起伏、昼夜温差对转台结构稳定性有较大的影响,为保证设计的光电转台正常工作,必须对其机械结构进行环境稳定性分析。而在等价风载、环境温差、海浪起伏环境条件下,常规的结构校核计算很难准确对转台的环境稳定性进行评估,所以本文将采用ABAQUS(CAE)软件对机械结构进行有限元分析,将环境因素以外部激励的参数形式输入三维仿真模型求得相应的响应,结合理论精度对船载光电转台的结构稳定性进行仿真验证,进而确保系统结构的环境适应性。
1 船载光电转台系统与结构设计
1.1 系统设计
本文所设计的船载光电转台技术要求如下:
1)监测距离:在20km标准能见度、三级海浪下,可见光/红外探测仪必须达到对500t以上的中型船只识别距离8km,海岸边或者船只上的人识别距离2km;
2)监控性能:图像成像稳定,可进行跟踪和扫描可疑目标,具有夜间成像能力和便利的监控控制界面;
3)海洋环境:我国近海东南沿海地区多台风暴雨,北部渤海黄海四季温差比较大。另外需要保证在海浪等级三级下正常运转;
4)转台工作范围:俯仰角-60°~+60°,方位角-180°~+180°或360°;
5)转台精度:稳定精度为0.03°,回归与预置位精度优于0.2°;
6)环境温度:工作温度-30℃~70℃;
7)工作湿度:90%±3%,非凝结;
8)质量与负载:质量≤75kg,负载≥30kg。
结合船载光电转台的技术指标,对船载光电转台的光电系统进行设计,主要包括:光学探测系统、随动控制系统、稳像控制系统、测量反馈系统和数据处理系统。工作原理如图1所示。
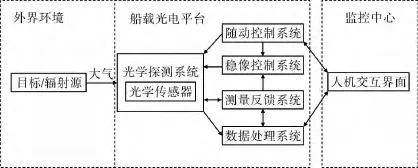
图1 船载光电转台原理图Fig.1 Principle diagram of ship photoelectric rotary table
光学探测系统需要实现全方位24h不间断的环境监测,由可见光摄像机和红外摄像机组成[1]。可见光摄像机由CCD镜头和CCD探测器组成。其中CCD镜头参数:0.847cm(1/3in)CCD,光学变倍18,焦距8mm~144mm,光圈范围F1.4~T360;CCD探测器参数:0.847cm(1/3in)CCD图像传感器,最小照度为0.02lx/F1.6(黑白)1/30s,分辨率为1 280*720,信噪比S/N大于50dB。红外摄像机由红外镜头和非制冷红外探测器组成。其中红外镜头参数:0.847cm(1/3in)CCD,5倍连续变焦,焦距30mm~140mm;非制冷红外探测器参数:分辨率324*256,最小照度为0lx/F1.0(红外开启)。
稳像控制系统是为了解决船载光电转台在海面进行侦查探测时,随着海浪的起伏、船身的摇晃而振动,导致图像的不稳定、模糊问题[2]。根据使用的海洋环境选用 MIN-900-2型号的陀螺仪,主要参数为传感器量程。陀螺:±300(°)/s;加速度:±1.7g/s2;磁场:±1.2A/m;加速度线性度:0.2%;加速度零偏稳定性:0.010g/s2;陀螺线性度:0.2%;陀螺零偏稳定性:0.7 (°)/s;磁强计线性度:0.4%;磁强计零偏稳定性:0.010A/m;精度:±0.5°(静态),±2°(动态);方向分辨率<0.1°。
随动控制系统是衔接稳像控制系统与光学探测系统[3]的纽带,将稳像系统传出的信号转变成转台实际的转动,从而调整光轴的位置,提供稳定的图像,来满足转台跟踪搜索功能。根据功能满足性与成本因素,设计选用型号为6030的电机运动控制卡作为主要载体。其主要参数为主机界面,33MPCI总线;工作环境:0~70℃,20%~90%的相对湿度,无凝结;脉冲发生率:106脉冲/s;驱动条件:高电平4.5V~5V,最大驱动电流50mA;运动曲线:梯形包络线和速度曲线;运动范围:位置指令 ,速度指令106脉冲/s。
测量反馈系统的主要功能是监测转轴的转动位置、转动速率,并通过反馈对转台的转动位置和速率进行调整,保证转台在规定的精度和轨迹范围内正常运行。具体构件有旋转变压器、光电编码盘、光电编码器、光电开关[4]。
数据处理系统的作用是将各个子系统所处理的数据信息进行重新收集、记录、存储,然后对数据加以处理[5],传递到人机交互界面加以控制,进而可以使得整个系统的信息能够相互交流,使整个系统成为一个有机的整体,共同完成系统的功能。
1.2 结构设计
选择pro/E软件进行转台结构的设计,以光电系统载体为基础、具体运动要求为前提,设计出具体的光电转台结构如图2所示。其中图2(a)为用pro/E设计的三维光电转台结构;图2(b)为实际加工出的虚拟样机;图2(c)为光电转台的内部分布与排线图。

图2 光电转台结构示意图Fig.2 Structure diagram of ship photoelectric rotary table
2 船载光电转台在特殊环境下的可行性分析
2.1 材料选择
要使光电转台能工作在所要求的海洋环境,必须选择合适的材料。而要对其进行模拟环境下的仿真也须结合材料进行详细计算,以确保所设计的光电转台符合工作要求。选择的船载光电转台结构材料的参数如表1所示。

表1 转台结构材料参数明细表Table 1 Schedule of material parameters
2.2 特殊海洋环境下的可行性分析
为保证光电转台结构在海洋环境下的可行性,需要分析等价静力风载、极端温度场和海浪振动3种海洋环境。本文运用ABAQUS软件作具体分析。
2.2.1 等价静力风载下的结构稳定性分析
等价静力风载下的静力学分析[6],主要是确定风载荷的大小及作用位置。因为静风风载可视为平均风压[7],影响它的因素主要有船载光电转台的高度、风的速度及风向,其计算公式为

为了考虑极限情况下静风风载对结构表面的影响,将船载光电转台的风载设为最大值。设定转台正面为逆风面,逆风面μs为1.5,转台工作高度为海平面0~10m,作用面无遮挡物,μz(z)查表为1.38[8],球体的基本风压值根据我国风压设定为2.9MPa,安全系数设定为5,设定)为30MPa。将风载荷以面力的形式施加在转台的正面(即逆风面)进行计算求解。图3为转台的等价静力风载分布图。

图3 等价静力风载示意图Fig.3 Diagram of equivalent static wind load
在五倍的等价静力风载作用下,最大应力点在俯仰左轴附近,大小从图4(a)左侧应力分析值可得为255MPa,远小于钢的屈服强度355MPa,而外壳球体基本应力小于149MPa,小于铝合金的屈服强度274 MPa,所以结构强度满足设计要求,转台在普通静风作用下可以可靠稳定工作。
由仿真结果提示可知:当海面遭遇强风或者台风后,风压会急剧上升,这时船载光电转台不能在海面作业,必须用船体外部防风罩进行保护,防止转台转轴在强大的风压下结构变形而使转台丧失原有精度。等价静力风载的应力云图根据计算经验取平均75%的S,Mises应力值(即三向综合应力值)和应变云图U,Magnitude位移(即三向等效相对位移)分别见图4(a)与图4(b)。

图4 等价静力风载荷的应变云图Fig.4 Contours of equivalent static wind load strain
2.2.2 极限温度下的结构稳定性分析
船载光电转台的工作环境覆盖热带、亚热带、温带,四季温差变化明显,我国的渤海区域在冬季会降到10℃以下,而我国南海海域的某些区域夏季会达到45℃。而在太阳光辐射的情况下,外壳的温度还会增高。技术指标规定船载光电转台必须在-30℃~70℃的温度下正常工作,因此机械结构需要保证在规定的温度范围内满足稳定性要求。
船载光电转台的最低临界温度为-30℃,在低温下结构收缩而产生内部应力。为了确保转台的精密性,本文对结构进行热应力和热应变的分析[9],保证结构在规定的稳定范围内。温度场的直接作用面为转台外表面,如图5所示。转台结构的材料热参数如表2所示。将温度场参数代入模型进行求解。
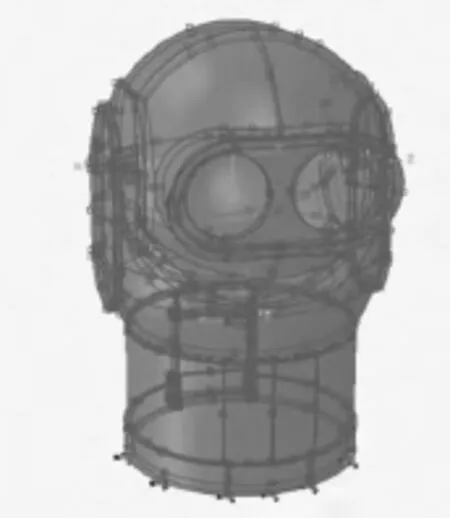
图5 温度作用面示意图Fig.5 Diagram of temperature effect
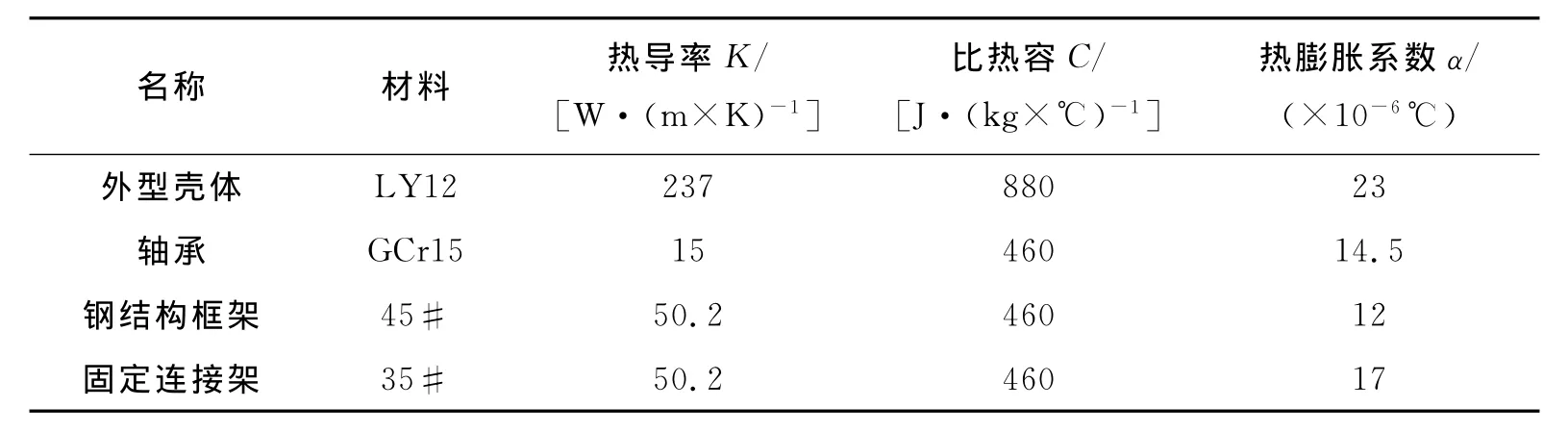
表2 转台结构材料热参数明细表Table 2 Schedule of material thermal parameters
在温差作用下结构产生了热应力,球壳的整体应力在14.6MPa以下,柱体主体的应力在72.9MPa以下,最大应力点连接轴处为174.8MPa,均小于铝合金的屈服强度274MPa,结构强度满足设计要求。结构应力云图和应变云图可见图6(a)与图6(b)。
船载光电转台的最高临界温度为70℃,在高温作用下,材料热膨胀破坏原有的结构稳定性,需要对其应力场与应变场重新验证,其仿真结果如下:球壳与柱体整体应力均在82.3MPa以下,最大应力点在支撑架底部,数值为247.1MPa,小于铝合金的屈服强度274MPa,满足强度设计要求。结构应力云图和应变云图可见图7(a)与图7(b)。

图6 -30℃应变示意图Fig.6 Strain diagram at-30℃

图7 70℃应变示意图Fig.7 Strain diagram at 70 ℃
2.2.3 海浪振动下的结构稳定性分析
海浪振动的载荷性质为动态随机,要得到波浪载荷的频谱应先对波浪载荷性质进行分析。根据概率论中平稳随机过程的求解理论可以得出,海浪的数学模型应为一个波面位移,服从均值为零的正态过程,具有平稳性和各态历经性。随机平稳性的定义是指随机过程ξ(t)的任意有限维分布函数与时间起点无关,即对于任意正整数n和所有的实数Δ均可得到公式:

式中:fn(x,t)为随机平稳函数;x1,x2,…,xn为整数n的随机取值;t1,t2,…,tn为取值的相应时间;Δ为实数。
又因为海浪谱可分为单一方向传播的长峰波谱与各个方向传播的短峰波谱,本文采用短峰波谱,国际上通用的2种海浪单方向波谱分别是Pierson-Moskowitz单 参 数 谱 即 (P-M 谱 )与Bretschneider双参数谱[10]。
Pierson-Moskowitz单参数谱适用于单方向传播的海浪:

式中:S(ω)为海浪谱密度;g为重力加速度;HS为有义波高m;普峰频率ωP=0.4(g/HS)1/2。
Bretschneider双参数谱[11]适用于单方向传播的海浪和正在成形的海浪:

式中:S(ω)为海浪谱密度;TZ为平均跨零周期;HS为有义波高m;普峰频率ωP=0.4(g/HS)1/2。平均跨零周期TZ=2π(m0/m2)1/2,m0与 m2为频率谱的零阶与二次矩。
船载光电转台的技术指标规定要在海浪等级三级下正常运转,海浪浪高0~1.25m,包含了正在形成的海浪,所以选择Bretschneider双参数谱[12]比较合理。
将波浪载荷的频谱输入到ABAQUS,而后选用非线性显示Newmark时间积分方法进行计算,可以得到5阶频率相应的振型。1~5阶的振型对应频率是1.815Hz、3.155Hz、4Hz、4.655Hz、5.218Hz,其振型的应变云图如8所示。

图8 随机振动响应5阶振型应变位移云图Fig.8 5-order modal strain displacement with random vibration response
由图可知,1阶振型的转台整体向右倾斜,最大应变点在支撑架的右上角,位移量为1mm;2阶振型的支撑架向外侧分离,底盘柱体呈波浪型形变,其总体应变分布在0.5mm以下;3阶振型的共振形变主要为底盘柱体,呈波浪型形变,其中应变峰值为1.02mm;4阶振型的共振形变主要为两侧侧盖板,支撑架整体向内弯曲,最大应变点在右侧侧盖的底部,形变量为1.05mm;5阶振型的共振主要发生在球壳的镜头孔处,结构呈现向内部弯曲的趋势,最大形变为1mm。1~5阶振型的最大形变位置均不在转轴附近,其转轴附近并没有受到大的变形激励,所以在随机振动下转台的结构稳定性符合精度要求。
3 结论
本文根据技术指标设计出光电转台,由于海面风力、海浪起伏、昼夜温差对转台结构稳定性有较大的影响,为保证光电转台正常工作,必须对其机械结构进行环境稳定性分析。在上述环境条件下,常规的结构校核计算很难准确对转台的环境稳定性进行评估,本文采用了ABAQUS(CAE)软件对机械结构进行有限元分析,可以计算出在海面风力条件下光电转台应力小于钢的屈服强度355MPa;在温差作用下最大应力小于铝合金的屈服强度274MPa;所以设计的光电转台可以在海洋条件下正常工作。
[1] Dai Yongjiang.Laser and infrared detection principle[M].1st ed.Beijing:National Industrial Press,2012.戴永江.激光与红外探测原理[M].第1版.北京:国家工业出版社,2012.
[2] Xu Jiangning,Bian Hongwei.Gyroscope principles and applications[M].1st ed.Beijing:National Defense Industry Press,2009.许江宁,卞鸿巍.陀螺仪原理及应用.[M].第1版.北京:国防工业出版社,2009.
[3] Zhao Kun,Che Chicheng.Wide spectral SWIR star sensor optical system[J].Journal of Applied Optics,2013,34(1):22-25.赵坤,车驰骋.宽谱段近红外星敏感器光学系统的设计[J].应用光学,2013,34(1):22-25.
[4] Ji Wei,Li Qi,Yang Haifeng.Precision optical tracking turntable design and servo control[J].Opto-Electronic Engineering,2006,33(3):11-16.姬伟,李奇,杨海峰.精密光电跟踪转台的设计与伺服控制[J].光电工程,2006,33(3):11-16.
[5] Ji Xiaohui,Yang Lu,Jiang Xu.Design of multi-optical-axis and multi-spectral collimation system [J].Journal of Applied optics,2013,34(1):22-25.纪小辉,杨璐,姜旭.一种多光谱多光轴准直系统的设计[J].应用光学,2013,34(6):894-896.
[6] ABAQUS.ABAQUS finite element analysis software application in the machinery industry[J].Machinery Industry Information and Network,2006(2):44-45.ABAQUS.ABAQUS有限元分析软件在机械行业中的应用[J].机械工业信息与网络,2006(2):44-45.
[7] PohI L C.Multi-sensor image fusion in remote sensing:concept methods and application[J].International Journal of Remote Sensing,1998,19(5):823-854.
[8] Jiang Kebing,Tu Yiqiang,Shao Fei.Structure analysis of finite element theory and ANSYS implementation[M].Beijing:National Defense Industry Press,2005.江克斌,屠义强,邵飞.结构分析有限元原理及ANSYS实现[M].北京:国防工业出版社,2005.
[9] Du Yang,Zhang Xiaoyu,Li Wengxiu.Virtual reality computer simulation in the form of the waves in the scene[J].Journal of Harbin Engineering Univer-sity,2001,22(3):26-30.杜岩,张晓宇,李文秀.虚拟现实场景中海浪形态的计算机模拟[J].哈尔滨工程大学学报,2001,22(3):26-30.
[10]Chen Yu,HU Yunan,Lin Tao,et al.Based on improved fractal wave spectrum of wave simulation[J].Naval Engineering University Newspaper,2012,24(6):21-25.陈瑜,胡云安,林涛,等.基于改进分形海浪谱的海浪模拟[J].海军工程大学学报,2012,24(6):21-25.
[11]Qiu Hongan.The establishment of a random wave model and the simulation analysis[J].Journal of System Simulation,2000,12(3):226-228.邱宏安.随机海浪模型的建立及仿真分析[J].系统仿真学报,2000,12(3):226-228.
[12]Yang Huizhen,Kang Fengju,Zhu Yanjun.Random wave simulation and validation based on wave spectrum[J].Journal of System Simulation,2012,12(5):2324-2326.杨惠珍,康凤举,褚彦军.基于海浪谱的随机海浪仿真 及 验 证 [J].系 统 仿 真 学 报,2012,12(5):2324-2326.
