永磁同步电动机的自抗扰控制研究
2015-05-28段小丽张永平任一峰
段小丽 张永平 任一峰
(1.晋中学院机械学院,山西 晋中 030600;2.中北大学计算机与控制工程学院,太原 030051)
永磁同步电动机具有效率高、转矩惯量小、易于控制等优点,在高性能伺服系统中得到了很广的应用。DTC 是直接对转矩和磁链进行的控制,它省去了矢量控制繁杂的坐标变化。20 世纪90年代,L.Zhong 等人改造了异步电动机的直接转矩控制方法,并成功用于PMSM 中,现在已有了相关的研究和仿真,但是直接转矩控制的低速性能差,转速超调大、转矩脉动大、电流畸变严重等[1]。
20 世纪70年代,中科院研究员韩京清提出了一种新的非线性控制器—自抗扰控制器。自抗扰控制器吸收了PI 控制的优点和现代控制理论的优势,它直接观测并补偿控制系统的总扰动(内扰和外扰),不需要精确的被控模型,目前已经在各个领域得到了非常广泛的使用[2]。本文将PMSM 的直接转矩控制系统中的PI 用ADRC 代替,解决低速性能差的问题。通过仿真表明,和PI-DTC 的PMSM 控制系统相比较,基于ADRC-DTC 的系统有更为优越的动态性能。
1 永磁同步电动机的直接转矩控制
1.1 PMSM 的数学模型
PMSM 直接转矩控制采用的是定子磁场定向控制方式,对PMSM 的磁链和转矩进行直接控制,根据d-q 坐标系下PMSM 的数学模型,可得到PMSM
的直接转矩方程[3]:

采用隐极式永磁同步电动机,Ld=Lq。

式中,Ld、Lq分别为定子d、q 轴定子绕组电感;np为极对数;ψs为定子磁链;ψf为永磁体基波磁场在定子绕组中生的磁链;δ为转矩角。
1.2 PMSM 的直接转矩控制
直接转矩控制方法是磁链和转矩的双闭环控制。基于DTC 的永磁同步电动机控制系统的基本结构如图1所示,其工作原理为[4]

图1 永磁同步电动机的DTC 控制框图
通过下式可得磁链和转矩的估算值T和ψ,然后分别和磁链和转矩的给定值比较,把它们的差值,作为磁链调节器和转矩调节器的输入,转矩调节和磁链调节是滞环比较器。


通过转矩调节器的输出τ和磁链调节器的输出φ选择合适的开关矢量,达到控制PMSM 的目的。
2 PMSM 的ADRC-DTC 的控制系统设计
自抗扰控制器由3 部分组成:跟踪微分器(TD)、扩张状态观测器(ESO)和非线状态误差反馈控制器(NLSEF)。TD 的作用是给出过渡过程的微分信号,为了设计的简洁性,所以在设计 PMSM 的ADRC-DTC 控制系统时,ADRC 中不需要TD,只需要二阶ESO 和一阶NLSEF。z1(t)是ESO 对n的观测值,z2(t)是ESO 对系统总扰动(内扰和外扰)的观测值,反馈量可以补偿总扰动,NLSEF 的作用是可以非线性加工和组合各阶误差信号[5]。用自抗扰控制器取代传统直接转矩控制系统中的PI 调节器,得到ADRC-DTC 的永磁同步电动机的控制方案如图2所示。

图2 基于ADRC 的永磁同步电动机DTC 框图
3 仿真结果及分析
在Matlab/Simulink 环境下构建系统仿真模型如图3所示。PMSM 参数如下:极对数为2,定子电阻Rs=12.2Ω,Ld=Lq=0.0064H,永磁体磁链为0.46Wb。
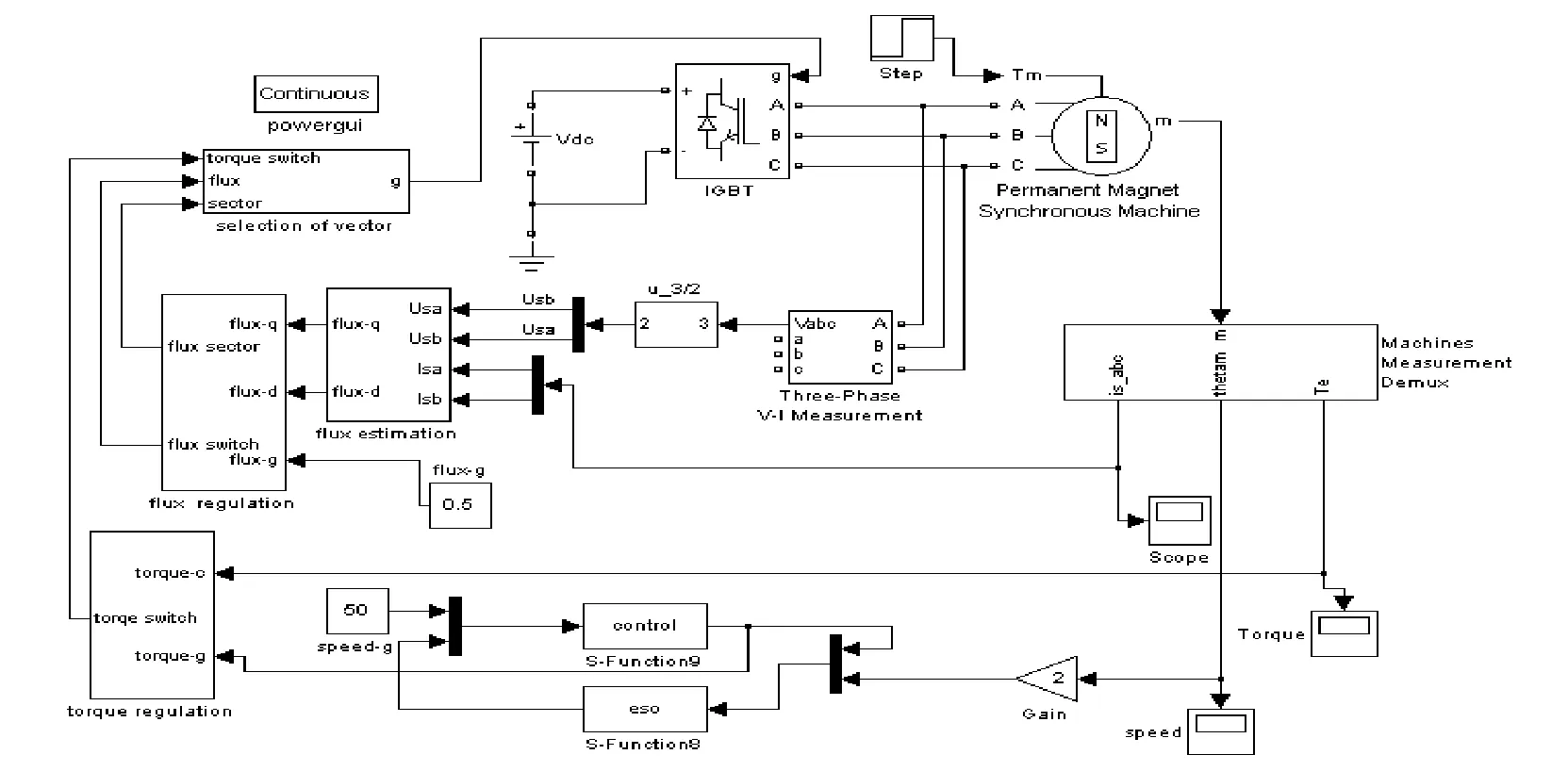
图3 基于ADRC-DTC 的永磁同步电动机仿真图
为了看ADRC 的控制效果,分别给出在低速时永磁同步电动机的PI-DTC 和ADRC-DTC 的仿真波形。给定转速为50r/min,给定转矩为10N·m。图4和图5分别低速状态下永磁同步电动机的PI-DT和ADRC-DTC 的转速响应图,图6和图7分别为两种控制方式的转矩波形,图8和图9分别两种控制方式的定子a 相电流波形。
从仿真结果可以看出,ADRC 控制的调速系统在低速时转速动态响应快且无超调,定子电流畸变小,转矩脉动也小。但是PI 控制的系统在低速时出现明显的超调,转矩脉动大,定子电流的畸变也大,可以看出ADRC 的优越的控制性能。

图4 PI 控制的转速响应图

图5 ADRC 控制的转速响应

图6 PI 控制的转矩波形

图7 ADRC 控制的转矩波形

图8 PI 控制的定子a 相电流波形图
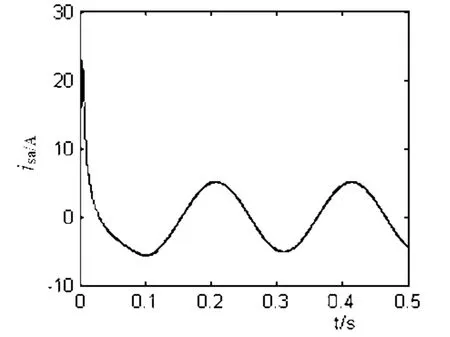
图9 ADRC 控制的定子a 相电流波形
4 结论
本文将ADRC 应用于PMSM 的直接转矩控制系统中,首先分析了PMSM 的直接转矩控制方程和直接转矩控制的原理,然后利用自抗扰控制技术,设计了ADRC-DTC 的永磁同步电动机的控制系统。仿真结果表明在低速时,基于ARDC-DTC 的控制系统比传统的直接转控制系统有很好动、静态性能,解决了PMSM 传统的直接转矩控制系统在低速时控制性能差的问题。
[1] 张淼,黎庆发,陈思哲,等.永磁同步电动机的内模直接控制[J].电气传动,2014,44(4): 25-29.
[2] 王超,李世华,田玉平.基于自抗扰技术的永磁同步电动机直接转矩控制[J].电气传动,2007,37(7): 14-17.
[3] 薛树功,瞿成明,魏利胜.永磁同步电动机自抗扰控制研究[J].安徽工程大学学报,2011,26(4): 44-46.
[4] 刘英培,粟然,梁海平.基于最小二乘支持向量机优化自抗扰控制器的永磁同步电动机直接控制方法[J].中国电动机工程学报,2014,34(27): 4654- 4663.
[5] 韩京清.自抗扰控制技术: 估计补偿不确定因素的控制技术[M].北京: 国防工业出版社,2008.
