称重设备仿观测器控制系统设计
2015-05-26许晓东周骥平
许晓东,周骥平,潘 毅
(1.扬州大学装备自动化应用技术研究中心,江苏扬州 225127;2.扬州工业职业技术学院机械工程学院,江苏扬州 225127;3.扬州大学机械工程学院,江苏扬州 225127)
称重设备仿观测器控制系统设计
许晓东1,2,周骥平3*,潘 毅2
(1.扬州大学装备自动化应用技术研究中心,江苏扬州 225127;2.扬州工业职业技术学院机械工程学院,江苏扬州 225127;3.扬州大学机械工程学院,江苏扬州 225127)
运用现代控制理论中的观测系统,设计了一种由proportion integral derivative(PID)控制器和观测系统组成的新型控制系统,通过计算称重系统的能观性,证明此控制系统可以适应特征根为实数或复数的不同称重系统,相较传统的PID串联控制器具有更好的普适性.利用观测系统与原称重系统输入相同、传递函数相似的特点,将系统的传递函数简化为只有基础系统传递函数G(s)和PID控制器传递函数C(s)组成的函数.用Matlab建立了相应的仿真模型,利用根轨迹法得到控制系统的根轨迹曲线和输出信号曲线,仿真结果表明这种控制系统可使反应时间缩短约75%.
称重系统;控制系统;观测系统;PID控制器
工业生产过程中,经常需要使用精确的称重设备测量微小颗粒的质量.一款称重设备是否先进,主要取决于其所使用的称重传感器[1-2].当今国内的称重装备大多采用电阻应变式称重传感器,通过电阻值的变化反映物体的质量,但这种装备存在反应速度慢且测量精度易受外界震动干扰的缺陷.对称重传感器采用恰当的控制方法可有效改善称重装备性能,目前普遍采用串级PID控制器和带反馈的PD(proportion derivative)控制器控制称重系统[3-5],这种控制方法虽能缩短测量时间,但设计较为复杂,且要求基础系统传递函数具有实数特征根,不具有普适性[6-7].本文运用现代控制方法中的观测系统设计方法[8],设计了一种由PID控制器和观测系统组成的新型称重控制系统,论证了当基础系统传递函数为复数时新系统的可行性,运用根轨迹法对控制系统进行分析并运用Matlab进行仿真.
1 原始系统和控制任务分析
质量称量系统通常用“弹簧-块-阻尼”系统来描述,在这种系统中,作用力F(在称重系统中表示为被测物体的质量m)、弹簧变形x和“弹簧-块”系统的运动速度v之间的关系为m×a(t)+D×v(t)+c×X(t)=F(t),式中m为被测物体的质量,a为“弹簧-块”系统的加速度,D为整个系统的阻尼比,v为“弹簧-块”系统速度,c为弹簧的弹性系数,X为“弹簧-块”的位移量.基本系统

该系统拥有2个积分环节(加速度-速度,速度-位移)和2个反馈信号(位移和速度反作用于加速度,类似于一个2阶的空间状态反馈系统),如图1所示.图1显示基本系统中有一个输入信号m(被测物体的质量)和一个输出信号x(系统的位移).信号m输入后可以得到如图2所示的仿真结果.
仿真结果表明,在基本系统中输入一个方波信号后,称重系统经过约0.08 s才能输出稳定信号.当称重任务繁重时,此系统反应时间较长,称量速度慢,因此缩短单次测量时间具有较大的实际应用价值.

图1 一般称重系统结构Fig.1 Model of a basic weighing system

图2 基础称重系统仿真结果Fig.2 Simulation result of the basic system
2 仿观测系统设计
2.1 观测系统设计方案

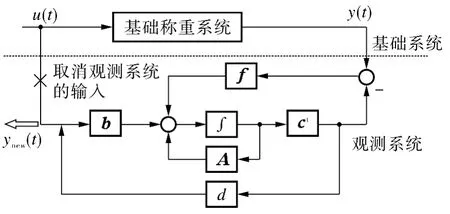
图3 特殊的观测系统Fig.3 Special observer system


图4 仿观测系统的控制系统结构Fig.4 Control system of the imitated observation

图5 简化后的控制系统Fig.5 The simplified control system
2.2 根轨迹法的控制单元分析
根轨迹法(root locus method)是一种求未定控制系统特征根的简单方法.在特征方程中某个或某几个参数未知时,用此方法可求出特征根与系统中未知参数的数值关系,并将其反映在横坐标为实数轴、纵坐标为虚数轴的复平面上.当系统的特征根全部落在虚数轴左侧时,该系统是稳定的,特征根越接近虚数轴,系统得到稳定响应的时间越短.
具体步骤为:① 分析基础系统知图5中简化控制系统的基础系统中仅有2个节点,没有零点;② 使用传递函数C(s)不同的控制器来观察系统节点和零点位置的改变;③ 运用Matlab软件计算当控制器中参数改变时整个称重系统的根轨迹曲线.
如用PID控制器作为C(s)时,PID控制器在 Matlab中表示为T=tf(K*poly([pole1,pole2]),poly([0])),仿真结果见图6.结果表明,使用PID控制器时,随着控制器中参数K的变化,系统的两个节点在相交后一个向远离零点的方向移动,另一个向接近零点的方向移动并与实数轴相交(见如图6(a)),选用一个靠近实数轴的零点,可以得到对应的参数K.用得到的参数K仿真得到一个稳定的输出信号(见如图6(b)),此时系统得到稳定的输出信号仅需0.02 s,与图2中的0.08 s相比有了较大幅度的缩短.
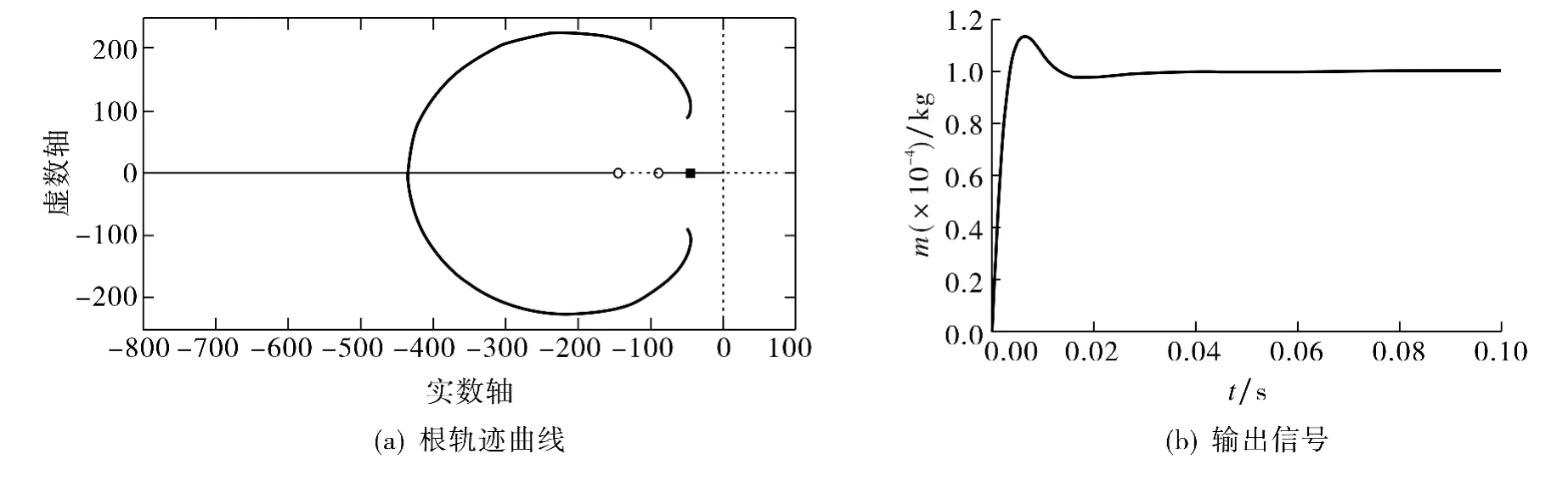
图6 使用PID控制器时的仿真结果Fig.6 Simulation result using a PID controller
[1]许晓东,周骥平.自平衡电磁秤空间状态控制系统的设计 [J].扬州大学学报(自然科学版),2013,16(2):30-34.
[2]LI Wanchun,ZHANG Wanyi,LI Liping.Using self-location to calibrate the errors of observer positions for source localization[J].J Syst Eng Electron,2014,25(2):194-202.
[3]JIA Qingxian,ZHANG Yingchun,LI Chengliang,et al.Fault reconstruction observer design for continuoustime systems with measurement disturbances via descriptor system approach[J].J Syst Eng Electron,2014,25(5):877-885.
[4]LEE K S,CHOI C C,LEE W T.Retraction control of motorized seat belt system with linear state observer[J].J Cent South Univ,2013,20:385-392.
[5]赵轩,白新龙,谢学飞,等.模拟蓄电池特性的直流电源研究 [J].扬州大学学报(自然科学版),2014,17(2):48-52.
[6]MORADI M.A genetic-multivariable fractional order PID control to multi-input multi-output processes [J].J Process Contr,2014,24(1):336-343.
[7]POUNDS P E I,BERSAK D R,DOLLAR A M.Stability of small-scale UAV helicopters and quadrotors with added payload mass under PID control[J].Auton Robot,2012,33(1/2):129-142.
[8]KICSINY R,VARGA Z.Real-time nonlinear global state observer design for solar heating systems[J].Nonlinear Anal:Real World Appl,2013,14:1247-1264.
[9]RISTIC B,ARULAMPALAM S.Bernoulli particle filter with observer control for bearings-only tracking in clutter[J].IEEE T Aero Elec Sys,2012,48(3):2405-2415.
[10]LIU Huixian,LI Shihua.Speed control for PMSM servo system using predictive functional control and extended state observer[J].IEEE T Ind Electron,2012,59(2):1171-1183.
[11]单泽彪,石要武,高兴泉.基于Simulink实现的数模混合控制系统仿真新方法 [J].吉林大学学报(工学版),2014,44(2):548-553.
Design of the control system for imitation observer
XU Xiaodong1,2,ZHOU Jiping3*,PAN Yi2
(1.Autom Equip Tech Res Center,Yangzhou Univ,Yangzhou 225127,China;2.Sch of Mech Engin,Yangzhou Polytech Inst,Yangzhou 225127,China;3.Sch of Mech Engin,Yangzhou Univ,Yangzhou 225127,China)
By imitating observer of modern control theories,a new type of control system consisting of a PID controller and an observer is designed.By calculating discriminate metris rank,it is proved that this new control system is adaptable to various weighing systems where the characteristic roots are real or complex numbers.Compared with traditional serial PID controllers,this new type of control system is found to have higher adaptability.Based upon the fact that the new observer and weighing sytems have same imput and similar transfer functions,the transfer functions of the designed control system is simplied into one consisting only of basic transfer functionG(s)and PID controller functionC(s).A corresponding simulation system,established with MATLAB,has yielded root locus curve and output signal curve of the designed control system.Assimilatin results indicate that this control system can dramatically shorten reaction time by approximately 75%.
weighing system;control system;observation system;PID controller
TB 114.2
A
1007-824X(2015)03-0037-04
2014-10-03.* 联系人,E-mail:jpzhou@yzu.edu.cn.
科技部中小企业创新基金资助项目(12C26213202510).
许晓东,周骥平,潘毅.称重设备仿观测器控制系统设计[J].扬州大学学报(自然科学版),2015,18(3):37-40.
(责任编辑 秋 实)
