低频时变时滞悬架系统的动态输出反馈鲁棒H∞多目标控制
2015-05-25陈长征王刚于慎波
陈长征,王刚,于慎波
(1.沈阳工业大学机械工程学院,沈阳110870;2.辽宁省振动噪声控制技术工程研究中心,沈阳110870)
低频时变时滞悬架系统的动态输出反馈鲁棒H∞多目标控制
陈长征1,2,王刚1,于慎波1
(1.沈阳工业大学机械工程学院,沈阳110870;2.辽宁省振动噪声控制技术工程研究中心,沈阳110870)
在实际的悬架系统主动控制当中,由于控制器存在时变时滞因素,而低频输入时滞对系统的稳定性及性能有很大影响。针对该问题,综合考虑系统的参数不确定性及执行器的时变时滞因素,使车身加速度在路面干扰下的H∞范数在全频域内达到最小,同时保证控制力的非线性饱和,行驶平顺性,接地性等时域硬约束条件,设计了基于动态输出反馈的鲁棒H∞控制器,并提出一种描述质量不确定性的匹配模型。采用Lyapunov-Krasovskii泛函法,通过引入松弛矩阵给出满足条件的凸组合不等式,减少了设计的保守性,应用LMI技术推导出H∞控制准则。最后,通过数值实例验证了该方法对于参数摄动下的低频时变时滞悬架系统控制性能的有效性。
低频时变时滞;主动悬架;H∞控制;动态输出反馈;线性矩阵不等式
随着汽车工业的发展,最大限度的提高汽车舒适性及平顺性逐渐成为汽车行业追求的目标[1]。近年来,由于一种考虑时域约束的H∞控制策略的提出,很多学者将该方法应用于汽车悬架的多目标控制当中[2-5]。一般来讲,在设计悬架的控制策略时,除了要保证舒适性外,还必须同时考虑悬架动行程,接地性,输出力饱和等时域约束条件。文献[6-7]分别针对基于轴距预瞄的半车悬架及轮毂电机驱动的汽车悬架,提出了相关的H∞控制策略,并通过数值实例验证了该方法的有效性。考虑到4~8 Hz频段内的车身加速度与舒适性密切相关,因此高会军等[8-9]将有限频域的H∞控制策略应用到悬架系统的多目标控制当中,使悬架的舒适性在低频处有所提高。受经济性及合理性的制约,全状态反馈控制在实际应用中难以实现。相对而言,通过有限的传感器来实现悬架的多目标控制更具实用价值。除了设计状态观测器外,还可通过输出反馈的方式来设计悬架的主动控制策略。
由于在实际的工程应用当中,控制回路不可避免的存在时滞因素,且输入时滞对系统的性能及稳定性有很大的影响,因此时滞因素引起了很多学者的关注。在设计考虑时滞的控制策略时,除了时滞补偿等方法外,还有一种在设计控制器时就将时滞因素考虑在内的鲁棒控制。文献[10-12]分别针对时不变及时变输入时滞,提出了时滞相关的H∞控制准则,并将其应用于悬架的多目标控制当中,但均通过全状态反馈的方式。文献[13]针对一类含时变输入时滞的悬架系统,通过基本不等式的方法,设计了基于动态输出反馈的H∞控制器,并验证了该方法的可行性。
基于上述分析,本文考虑了一类含参数不确定性及时变输入时滞的主动悬架系统,设计了基于动态输出反馈的鲁棒H∞控制器,并将其应用于悬架的多目标控制当中。且在控制器设计过程中,直接采用引进松弛矩阵的方法,减少了设计的保守性。最后通过一个数值实例验证了该方法的可行性及有效性。
符号标记:矩阵上标T代表其转置,2P=P+PT,星号*表示矩阵的对称项,矩阵P≻0(≺0)表示其为正定(负定)矩阵,l2[0,∞)表示平方可积的矢量函数空间,ℝn表示n维的欧几里得空间,{·}i表示相应矩阵的第i行,diag{…}表示对角矩阵。
1 问题描述
考虑如下形式的时变时滞线性系统:
式中:x(t)∈ℝn为系统的状态变量,u(t)为系统的控制输入,ω(t)为外界干扰。其中d(t)为时变连续函数并且满足:0≤d(t)≤,(t)≤μ。这里假定参数不确定项[ΔA,ΔB]=EΣ(t)[F1,F2],且Σ(t)TΣ(t)≤I,∀t≻0,x0(t)为系统的初始状态变量,z1(t)为系统的被控输出,z2(t)为系统的约束输出,y(t)为系统的可测状态量,当[ΔA,ΔB]=0时,式(1)为该系统的名义模型。
假设式(1)的全阶动态输出反馈控制器形式如下:

式中:Ac、Acd、Bc、Cc为待求的控制器增益矩阵;(td(t))为该动态反馈控制器的状态时滞项。结合式(1)、式(2)可得闭环增广系统:

本文的目标可归结为设计一个形式如式(2)的全阶动态输出反馈控制器,使得:①闭环系统式(3)在无干扰下渐近稳定;②在零初始条件下,满足H∞性能,即

2 时滞界限相关H∞鲁棒控制结果
为了满足上述的性能指标,首先给出基于动态输出反馈的鲁棒H∞控制结果,其定理如下。
定理1:对于给定的标量d≻0,μ,ε≻0,r≻0,j=1,2,若形如式(2)所示的动态输出反馈控制器存在,使得①闭环系统式(3)在无干扰下渐近稳定,②且对于所有的d≺,≺μ,‖ωmax‖=r/γ2满足式(4),式(5)所示的性能指标,当且存在适当维数的控制矩阵Ac、Acd、Bc、Cc、N、M及对称正定矩阵P、S、Q、R,使得下列矩阵不等式成立:

当只考虑式(1)的名义模型时,即[ΔA,ΔB]=0时,有Φ=θ11+θ13IθT13+θ14R-1θT14。从式(13)可知,由于R≻0,故不等式右边后2项总小于零。由文献[14-15]可知,若不等式满足:
可保证式(13)小于零。这里式(14)为一组凸组合形式,根据文献[16-17]可知,与其等价的非保守条件为:

由于定理1中包含双线性项,为了便于求解,这里将定理1中的矩阵不等式转化为LMIs的形式。将对称正定矩阵P、P-1分解为如下形式:



由于推论1为考虑时变时滞下的输出反馈鲁棒H∞控制,若不考虑时滞,则该问题为一般情况下的约束H∞控制问题。若仅考虑时不变时滞,则相关控制方法可参照文献[10-11]。
3 时变时滞悬架系统
考虑如图1所示的时变时滞主动悬架模型,其中ms、mu分别代表名义簧上簧下质量,ks,cs分别为悬架的刚度与阻尼,ku为轮胎刚度,u为主动控制力,xs,xu为簧载与非簧载质量的垂直位移,q为路面不平度激励。
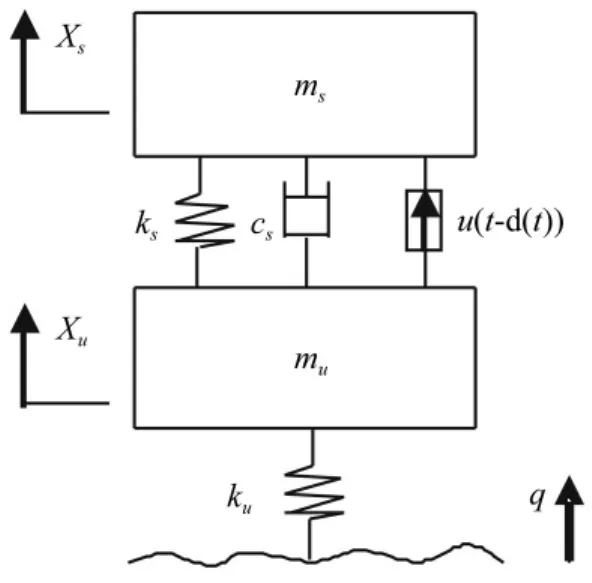
图1 1/4车悬架模型Fig.1 Quarter-vehicle suspension model
这里选取系统的状态变量为:

考虑经济性与实用性这里选取输出变量为:

时域硬约束可表示为:
在式(26)中,第1项代表悬架动行程的最大限值,第2项代表衡量安全性及操纵性的轮胎动静载荷比,第3项代表输出力的约束饱和。则该模型的状态空间方程及其被控输出可由闭环系统式(1)表示。式中:

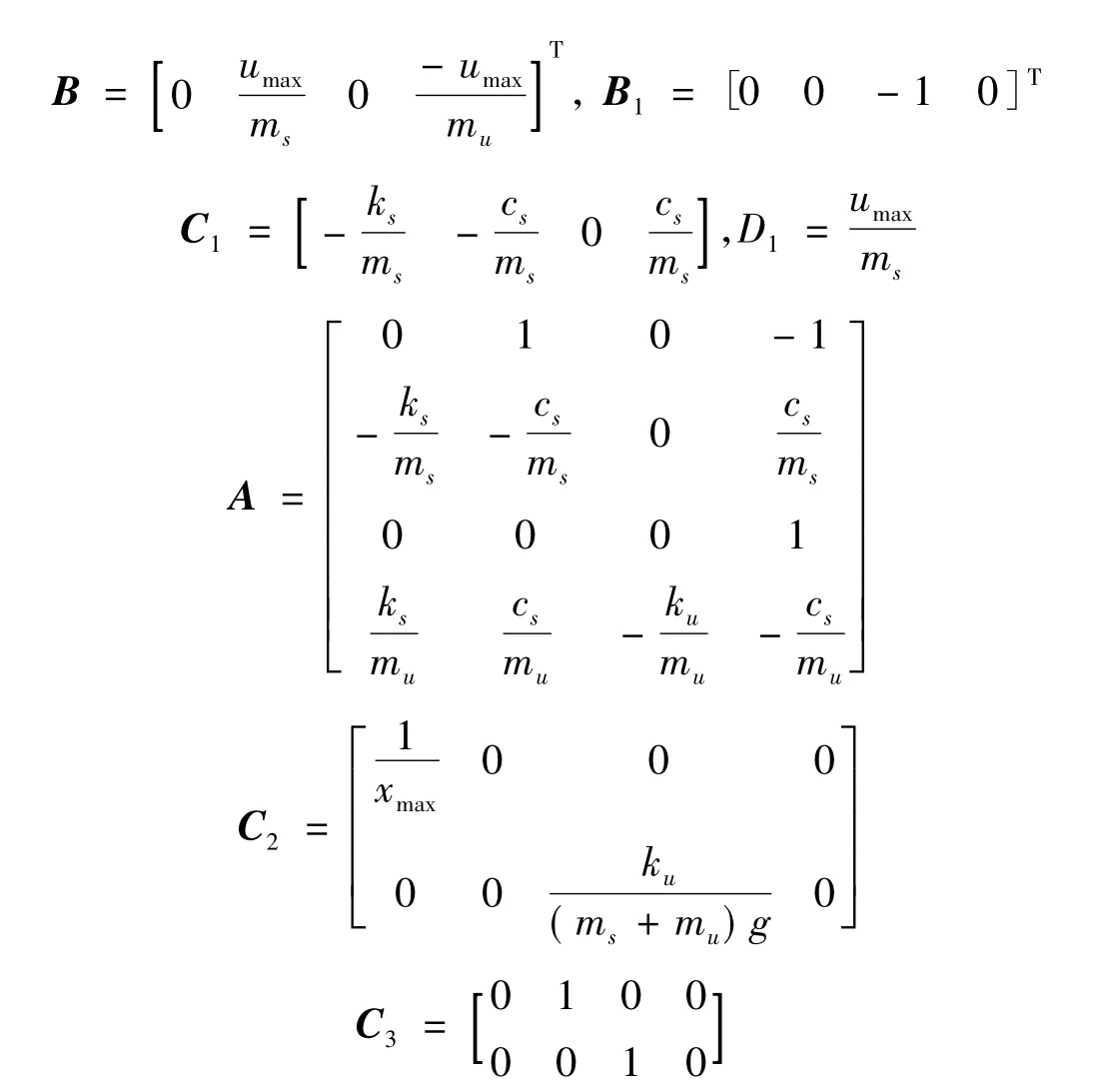
式中:xmax为悬架动行程约束限值,umax为执行器最大饱和输出力,(ms+mu)g为悬架静载荷,ω(t)=·q。针对上述时变时滞悬架系统,可通过求解推论1求得控制器增益矩阵Ac、Acd、Bc、Cc。
为了较精确的反映汽车行驶过程中簧载质量的摄动情况,这里取E=[0σ0 0]T,F1=C1,F2=D1,则[ΔA,ΔB]=EΣ[F1,F2]为只与簧上质量有关的摄动项。这里假设簧载质量变动范围为Ms=(0.8~1.2)ms,则可取σ=-0.25,当Σ(t)∈(-1~1)时,该匹配模型可以较精确的描述汽车在簧载范围内的质量摄动情况,从而保证系统的鲁棒性。
4 数值实例分析
为了验证该方法的可行性,以图1所示的悬架模型为例给出数值验证,相应参数(见表1)。
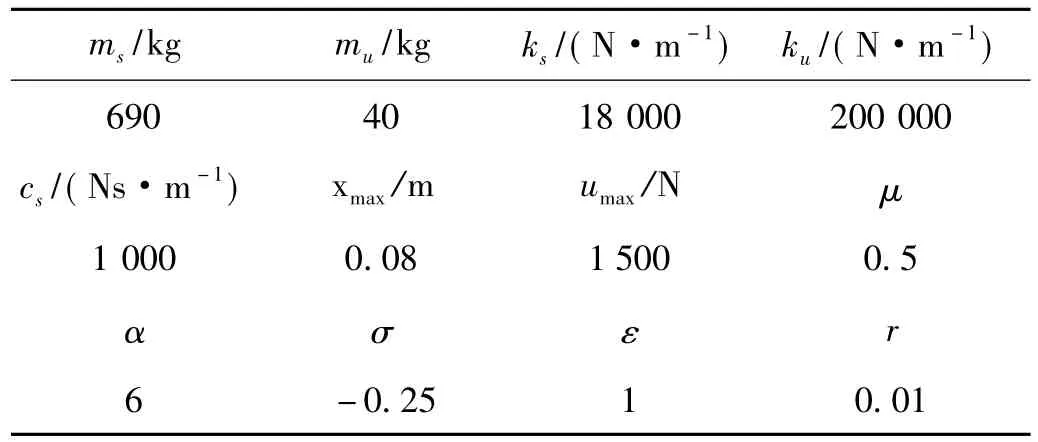
表1 1/4车模型参数Tab.1 Quarter-car model parameters
为了便于说明设计的有效性及保守性,将本文的鲁棒时滞H∞控制方法(控制器Ⅰ)与文献[10]中基于积分不等式的时滞相关H∞控制方法(控制器Ⅱ)以及文献[2]中不考虑时滞的H∞控制方法(控制器Ⅲ)进行对比。
4.1 频域分析
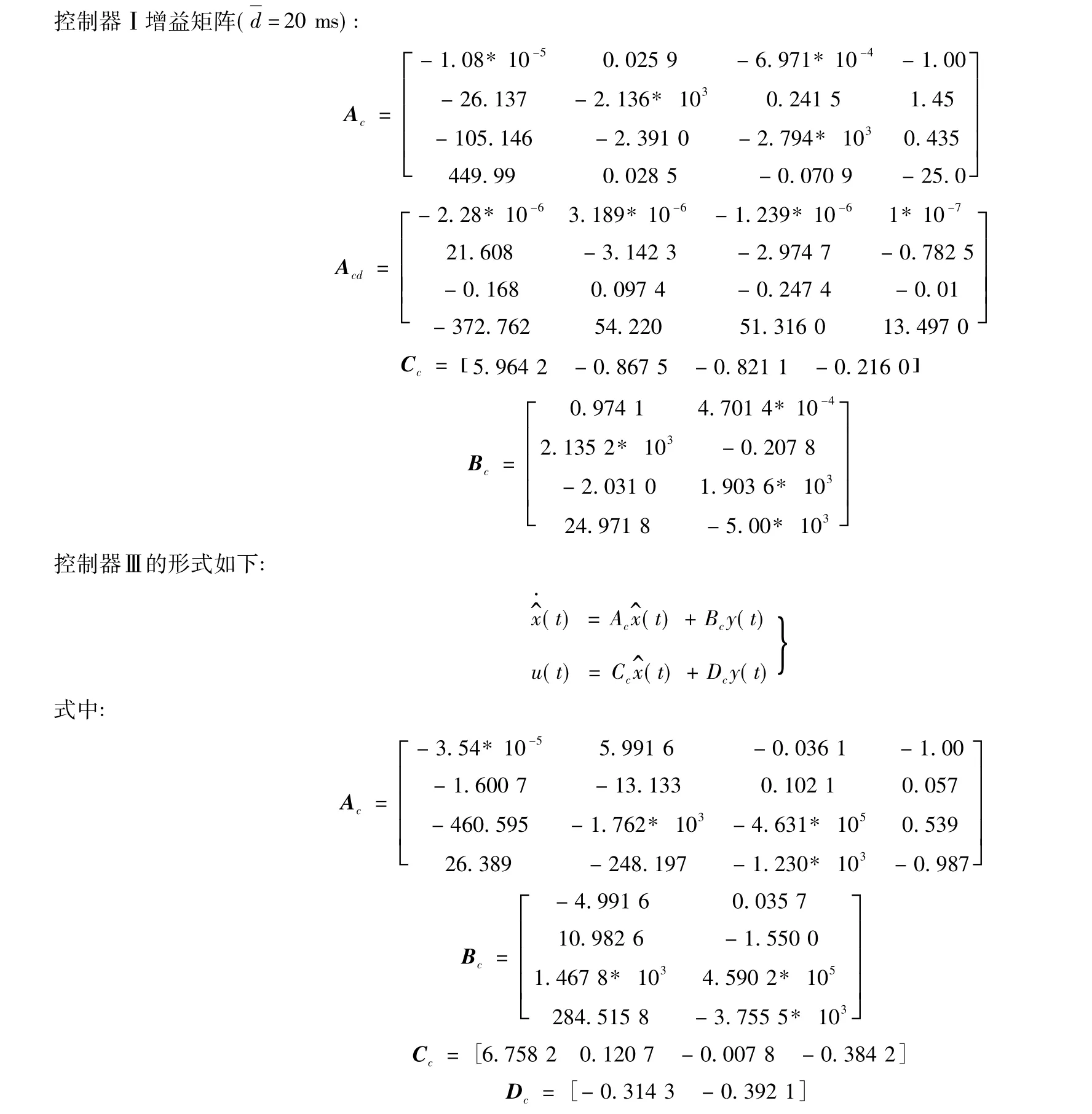
这里假定控制系统的时滞上限为d=20 ms,并取簧载质量为名义质量,即Σ(t)=0,根据表1中的参数,求解推论1,可得最优的控制器Ⅰ增益矩阵(见附录),应用相同参数求解文献[10]中的定理1,可得相应的控制器Ⅱ增益矩阵。根据该控制器增益矩阵可得车身加速度的奇异值响应情况(如图2,时滞d=20 ms)。从图2可知,控制器Ⅰ能取得更小的能量增益值,在4~8 Hz范围内尤为明显,故该方法具有较小的保守性,在控制回路存在输入时滞的情况能有效地提高舒适性。
为了验证该方法的鲁棒性,这里取Σ(t)=(-1, 0,1),即对应实际簧载质量0.8ms,ms,1.2ms。根据控制器Ⅰ可得不同簧载质量下的车身加速度频响曲线(见图3),从中可看出质量摄动并不影响悬架的舒适性,尤其在对舒适性影响较大的1~100 Hz范围内。为了研究时滞上限为控制器保守性的影响,这里分别取=10 ms=20 ms,求解推论1可得相应的控制器矩阵。图4为在不同时滞上限控制器下的车身加速度频响情况,其中时滞均为上限。从图4可知,随着时滞上限的增加,系统的保守性增加,造成舒适性变差。由于在实际应用中,时滞通常为时变有界的,而该方法可保证时滞小于上界的情况下,满足系统的性能指标。
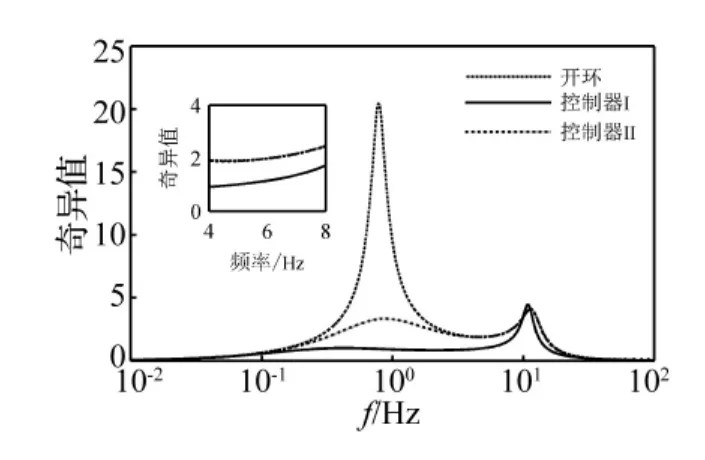
图2 车身加速度奇异值响应曲线Fig.2 Curves of MSVs of body acceleration
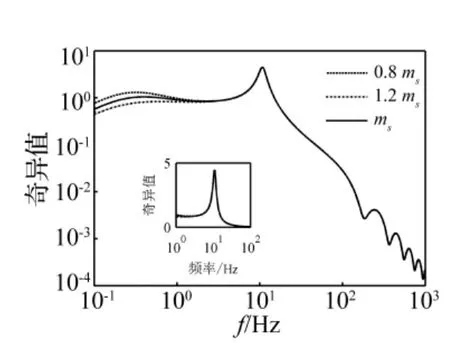
图3 不同ms下的车身加速度响应情况Fig.3 Response of the body acceleration for different ms
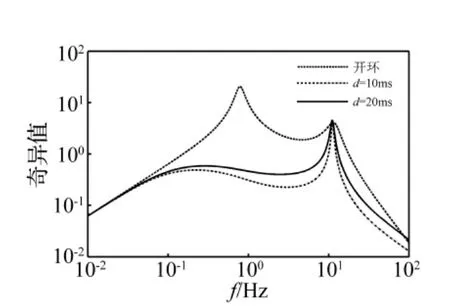
图4 不同下的车身加速度响应情况Fig.4 Response of the body acceleration for different
4.2 时域分析
为了验证该方法对时域约束的响应情况,这里采用的路面输入为短时的包块冲击激励,其导数可用式(27)描述:
这里取a=0.1,f=1 Hz。为了研究时变时滞对系统稳定性及性能的影响,这里亦求解文献[2]中不考虑时滞的控制器Ⅲ(见附录),将其与本文中的方法进行比较。这里取时滞项为:d=(7sin˜ωt+12)ms,其中时滞频率˜ω分别取为0.3 rad/s、2πrad/s,由于时滞项d不能超前,故d≥0。根据求出的控制器Ⅰ,控制器Ⅲ,可得图5所示的不同时滞频率下的悬架各控制输出包块响应情况(控制器Ⅰ(—),控制器Ⅲ(…),被动悬架(┄))。图6为时滞分别取为d=10 ms、d=17 ms时的响应情况。从图6可知,不考虑时滞的主动悬架系统对于低频大时滞较为敏感,当时滞项超过一定值时,易出现发散现象,导致控制失效,且低频时滞对主动悬架性能影响较大。而本文的设计方法显然对于低频时变时滞具有很好的稳定性,舒适性不受影响,且悬架动行程比率,轮胎动静载荷比及输出力比率均故满足时域的约束要求。从推论1中亦可知,在干扰能量小于上界时,可保证系统的约束性能得到保证。从文献[2]中亦可知,舒适性与约束性能有一定的矛盾关系,可通过选取合适的r值来得到最佳的性能权衡。
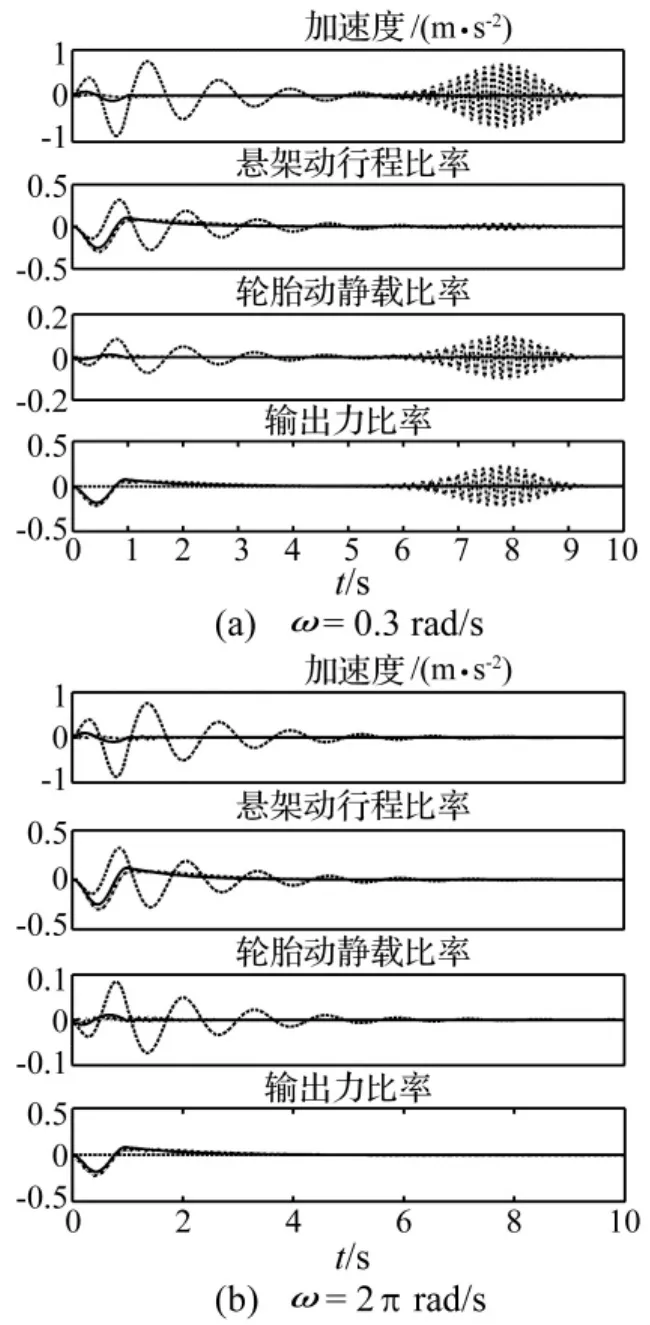
图5 不同时滞频率下的包块响应Fig.5 Bump responses for different˜ω
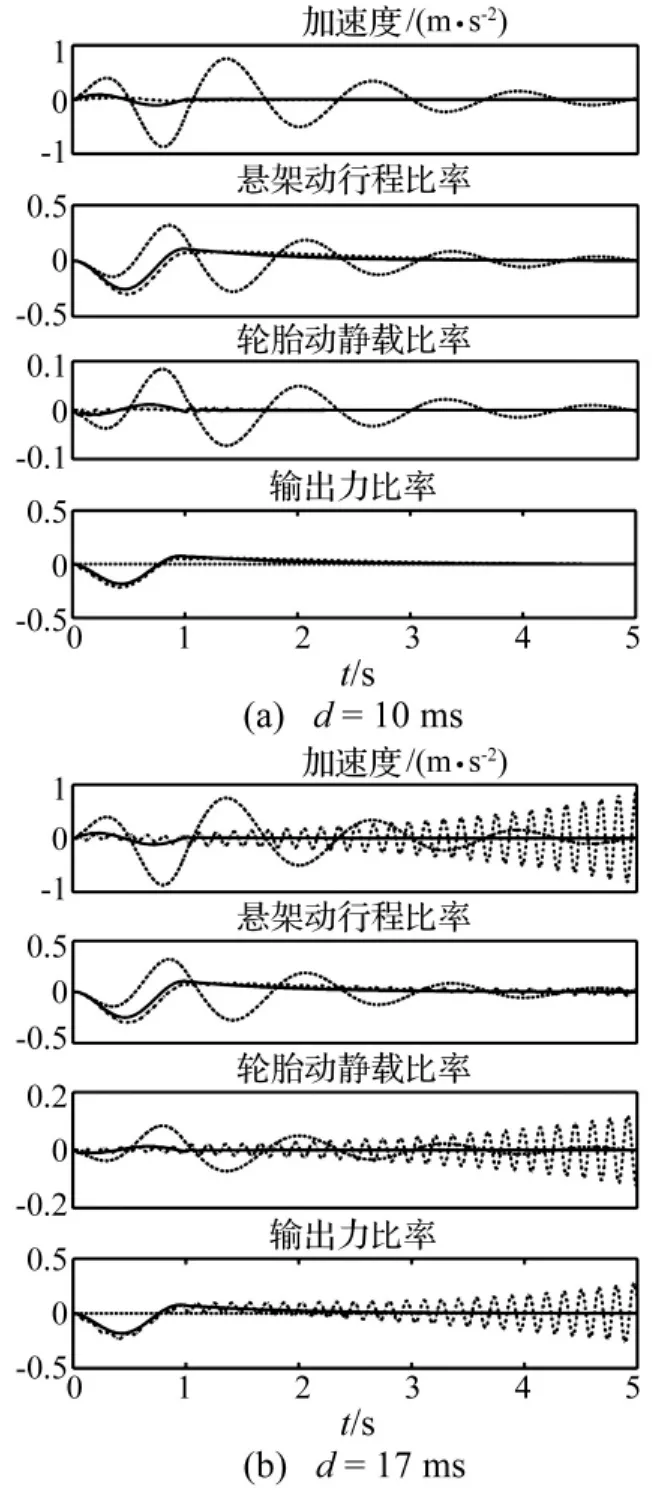
图6 不同时滞下的包块响应Fig.6 Bump responses for differentd
5 结论
本文处理了一类含低频时变输入时滞的主动悬架鲁棒H∞多目标控制综合问题,通过动态输出反馈的方式不仅提高了悬架的舒适性并能保证时域硬约束等条件,提出一种近似描述质量摄动的匹配模型,对于实际具有参数摄动的时变时滞悬架系统具有一定的鲁棒性。基于Lyapunov-Krasovskii泛函法,通过选取自由权矩阵给出满足条件的凸组合形式,减少了设计的保守性,并以LMI的形式推导出时滞界限相关的控制准则。最后通过一个数值实例研究了时滞悬架系统的性能特性,结果表明不考虑时滞的主动悬架系统对于存在的低频大时滞较为敏感,甚至会导致控制性能失效,而该控制方法能保证悬架系统在频域及时域的有效性。由于设计存在一定的保守性,使得悬架的综合性能受到一定的影响,减少设计的保守性是以后应该考虑的问题,且本文是在全频域内满足悬架的H∞性能,如何在有限频域内处理该类悬架系统,使悬架能够在低频处性能有所提高也是以后需要考虑的因素。
[1]孙维超.汽车悬架系统的主动振动控制[D].哈尔滨:哈尔滨工业大学,2013.
[2]CHEN H,GUO K H.Constrained H∞control of active suspensions:an LMI approach[J].IEEE Transactions on Control Systems Technology,2005,13(3):412-421.
[3]李荣,焦晓红,杨超.基于动态输出反馈的半车主动悬架系统鲁棒控制[J].振动与冲击,2014,33(7):187-193.
LI Rong,JIAO Xiao-hong,Yang Chao.Output feedbackbased robust control for a half-car hydraulic active suspension system[J].Journal of Vibration and Shock,2014,33(7): 187-193.
[4]Li P,Lam J,Cheung K C.Multi-objective control for active vehicle suspension with wheelbase preview[J].Journal of Sound and Vibration,2014,333(21):5269-5282.
[5]Guo L X,Zhang L P.Robust H∞control of active vehicle suspension under non-stationary running[J].Journal of Sound and Vibration,2012,331(26):5824-5837.
[6]Li P,Lam J,Cheung K C.Velocity-dependent multiobjective control of vehicle suspension with preview measurements[J].Mechatronics,2014,24(5):464-475.
[7]Wang R,Jing H,Yan F,et al.Optimization and finitefrequencyH∞control of active suspensions in in-wheel motor driven electric ground vehicles[J].Journal of the Franklin Institute,2015,352(2):468-484.
[8]Sun W,Gao H,Kaynak O.Finite frequency control for vehicle active suspension systems[J].IEEE Transactions on Control Systems Technology,2011,19(2):416-422.
[9]Sun W,Li J,Zhao Y,et al.Vibration control for active seat suspension systems via dynamic output feedback with limited frequency characteristic[J].Mechatronics,2011,21(1): 250-260.
[10]Du H,Zhang N.H∞control of active vehicle suspensions with actuator time delay[J].Journal of Sound and Vibration,2007,301(1/2):236-252.
[11]Sun W,Zhao Y,Li J,et al.Active suspension control with frequency band constraints and actuator input delay[J].IEEE Transactions on Industrial Electronics,2012,59(1): 530-537.
[12]Zhao Y,Sun W,Gao H.Robust control synthesis for seat suspension systems with actuator saturation and time-varying input delay[J].Journal of Sound and Vibration,2010,329 (21):4335-4353.
[13]Li H,Jing X,Karimi H R.Output-feedback-based H∞control for vehicle suspension systemswith control delay[J].IEEE Transactions on Industrial Electronics,2014,61(1): 436-446.
[14]He Y,Wang Q G,Lin C,et al.Delay-range-dependent stability for systemswith time-varying delay[J].Automatica,2007,43(2):371-376.
[15]Jiang X,Han Q L.Delay-dependent robust stability for uncertain linear systems with interval time-varying delay[J].Automatica,2006,42(6):1059-1065.
[16]Park PG,Ko JW.Stability and robust stability for systems with a time-varying delay[J].Automatica,2007,43(10): 1855-1858.
[17]Wu M,He Y,She JH,et al.Delay-dependent criteria for robust stability of time-varying delay systems[J].Automatica,2004,40(8):1435-1439.
附录
Multi-objective control for suspension systemsw ith low frequency,time-varying,and time delay via an output feedback-based robust H∞controller
CHEN Chang-zheng1,2,WANGGang1,YU Shen-bo1
(1.School of Mechanical Engineering,Shenyang University of Technology,Shenyang 110870,China; 2.Liaoning Provincial Engineering Center for Vibration and Noise Control,Shenyang 110870,China)
In the actual active suspension systems,the controller has time-varying and time-delay.Low frequency,time-varying and time-delay have great influences on stability and performance of a system.Here,for this problem,considering parametric uncertainties of the system and time-varying,time-delay of actuators,the vehicle body acceleration was taken as the performance output,its H∞norm under the disturbance of road surface would reach minimum in frequency domain to improve the ride comfort.In addition,a norm-bounded model with parmetric uncertainties was introduced,the time-domain hard constraints for actuator saturation,suspension stroke,and road holdingwere guaranteed in the robust H∞dynamic output feedback controller design.Based on Lyapunov-Krasovskii functional approach,a convex combination ofmatrix inequalitywas derived by introducing some relaxationmatrices to reduce the conservatism of design,H∞control criteria were obtained adopting the technoque of linear matrix inequalities(LMIs).Finally,numerical exampleswere given to demonstrate the effectiveness of the proposed method for suspension systems with low frequency,time-varying and time-delay under parametric perturbation.
low frequency;time-varying and time-delay;active suspensions;H∞control;dynamic output feedback;linearmatrix inequality
TP271;O328
A
10.13465/j.cnki.jvs.2015.23.027
国家自然科学基金(51175350)
2015-01-08修改稿收到日期:2015-06-05
陈长征男,博士,教授,博士生导师,1964年生
王刚男,博士生,1990年生
