液压系统参数对液压互联悬架动态响应的全局灵敏度分析
2015-05-25周兵耿元黄晓婷
周兵,耿元,黄晓婷
(湖南大学汽车车身先进设计制造国家重点实验室,长沙410082)
液压系统参数对液压互联悬架动态响应的全局灵敏度分析
周兵,耿元,黄晓婷
(湖南大学汽车车身先进设计制造国家重点实验室,长沙410082)
针对半车液压互联悬架防侧倾模型进行频域分析,建立了四自由度机械和液压耦合系统的动力学方程,根据系统的频响函数和路面输入分别得到垂直模态和侧倾模态下的加速度功率谱密度响应。采用Sobol全局灵敏度分析方法计算了液压参数对垂直响应和侧倾响应的灵敏度,并对计算结果进行分析。分析结果表明:与液压缸上下腔连接的阻尼阀的压力泄漏系数对垂直模态响应影响较大;蓄能器参数及与蓄能器连接的阻尼阀的压力泄露系数对侧倾模态响应影响较大。本研究可用于对汽车液压互联悬架系统进行平顺性评估以及后续的参数优化。
液压互联悬架;加速度响应;灵敏度分析;Sobol方法
互联悬架是指单个车轮运动导致其他车轮或车轮组弹簧力变化的悬架系统的总称[1]。互联悬架与传统悬架相比,能在乘坐舒适性不受负面影响的前提下,改善车辆操纵性能,实现对平顺性和操纵稳定性的协调控制。根据互联悬架传力介质的不同,可分为机械连杆式、空气式、油气式、液压式互联悬架。液压互联悬架作为一种新型的高级悬架系统,是由安装于车轮与车身之间的液压缸、连接各液压元件的油管、阻尼阀和蓄能器组成。近年来,国内外学者对互联悬架开展了大量深入的理论研究:Gay等[2]建立了液压互联悬架系统的线性状态空间模型,主要用于控制方法的对比研究;Mace[3]运用电子网络理论和系统综合方法理论研究被动液压互联悬架的特性;王增全等[4]用试验验证的油气互联悬架数值模型,分析影响阻尼孔两端压力值和压差变化的主要因素。
从已有的研究侧重点和方法来看,对互联悬架的研究主要集中于建立模型和对稳态特性的考察,几乎没有对整个系统液压参数的灵敏度进行分析。灵敏度分析是指定性或定量地分析包括模型参数在内的模型输入对模型输出的影响,分为局部和全局灵敏度分析方法。其中全局灵敏度分析法可以检验多个参数同时变化对模型结果产生的总影响,具有更高的应用价值。常用的全局灵敏度分析方法有多元回归法、Sobol、RSA、FAST等方法。其中,Sobol法具有形式简单、计算简便等优点,是最具代表性的全局灵敏度分析方法。本文在四自由度液压互联悬架防侧倾模型的基础上,采用Sobol[5]全局灵敏度分析法,计算了蓄能器和阻尼阀的液压参数对加速度输出谱密度的影响,通过排序明确了其中哪些参数对系统的动态影响较大并作出分析,为液压互联悬架的优化提供了理论依据。
1 四自由度液压互联悬架建模
四自由度半车防侧倾液压互联悬架的模型见图1,在整个机械液压耦合系统模型[6]的建立过程中,轮胎由线性弹簧减振器代替,连接轮胎与车身的为线性弹簧与双向作用液压缸,两液压缸见图2所示反向互联,从而达到防侧倾的效果。
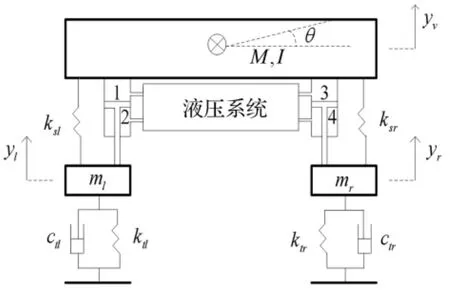
图1 液压互联悬架侧倾模型示意图Fig.1 Schematic of a half-car rollmode with an hydraulically interconnected Suspension
在对机械系统建模时,设系统的位移变量y=[yl,yr,yv,θ]T,根据牛顿第二定律可得:

式中:M、C、K分别为质量、阻尼、刚度矩阵;液压缸对悬架的支撑力F1(t)为
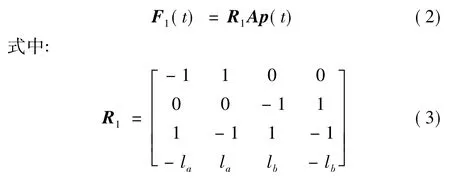
为线性转换矩阵,A=diag(A1,A2,A3,A4)为液压缸的面积矩阵,压力变量p=[p1,p2,p3,p4]T;F2(t)= F(t)η(t)为路面输入力,其中F(t)为路面系数矩阵,η(t)=[ηl,ηr,0,0]T为路面位移。
液压系统的组成见图2所示,整个机械液压耦合系统的刚度和阻尼由流经油管、阻尼阀、蓄能器、三向接头等液压元件的进出流量进行调整。假设没有任何流量泄漏,液体流量q=[q1,q2,q3,q4]T与悬架位移的关系有:

图2 抗侧倾液压系统Fig.2 Schematic of anti-roll fluid system
为线性转换矩阵。
在对液压系统的建模时,首先将液压元件沿液压回路分段离散化(各节点在图2中已标出),再采用传递矩阵法和液压阻抗法,最后得到在频域中,整个液压系统的流体压力P(s),即P(s)=Z(s)Q(s),其中Z(s)为液压系统的阻抗阵。
综上,对式(1)和式(2)做拉普拉斯变换得频域内机械与液压耦合系统的动力学方程为:

2 Sobol法计算全局灵敏度
2.1 设计变量
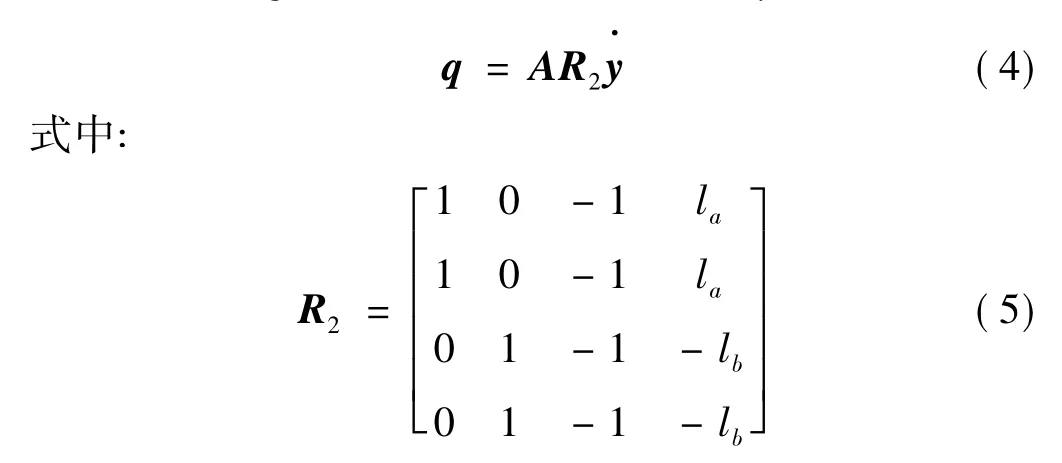
液压元件参数的选取影响着整个耦合系统的加速度输出响应。本文选取阻尼阀及蓄能器等元器件的典型液压参数为设计变量,具体的参数范围见表1。
表1 典型液压参数的范围Tab.1 Range oftypical properties in the fluid system
2.2 目标函数
假设路面模型呈各向同性且服从二维高斯随机分布;左右车轮的路面输入谱密度相同,则常见的路面对半车模型的输入谱密度矩阵[7-8]为:
当外力只有路面输入力时,对F2(t)=F(t)η(t)做拉普拉斯变换,则系统微分方程(5)变形为:

因此,可以得到系统加速度对路面输入的频响函数矩阵H(s):
当左右两车轮受到如上所述路面不平度的激励时,在频域内的某一点处的输入谱和输出谱存在如下关系:
式中:i=1,2,3,4。当i=3时为车身垂直模态响应谱密度值;i=4时为车身侧倾模态响应谱密度值。Hij(j =1,2)为传递函数矩阵中的元素,H(j=1,2)为Hij的共轭复数[10]。
机械及液压系统参数见表2。
在matlab中编写m文件建立目标函数,设置车辆仿真速度为v=20 m/s,运行得到两种模态下车身加速度响应输出谱密度曲线见图3。
由图3可知:当f=1.21 Hz时车身垂直加速度输出谱密度值达到最大;当f=2.61 Hz时车身侧倾加速度输出谱密度值达到最大。在输出谱密度值取最大值时,才能有效评估悬架的平顺性。因此,灵敏度分析的目标函数选择为:液压参数变化时,车身垂直和侧倾加速度输出谱密度值分别在频率为1.21 Hz和2.61 Hz时的大小。

表2 机械及液压系统参数Tab.2 Properties of themechanical and fluid system
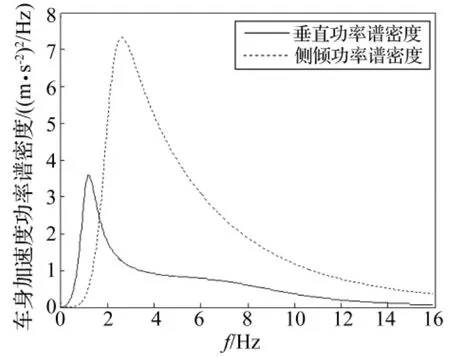
图3 车身垂直和侧倾加速度输出谱密度曲线Fig.3 Bounce and roll acceleration power spectrum density of car body
2.3 灵敏度计算
首先在ISIGHT软件里进行试验设计,在设计空间按照表1对上述六个参数进行优化拉丁超立方取样,抽取2个容量为2 000的样本,分别用矩阵Am×n、Bm×n表示,两矩阵中的每一行都是目标函数的一组具体的输入组合,其中m=6,n=2 000。
记Ci是将矩阵B的第i列换成矩阵A的第i(i≤6)列所得的矩阵;记C-i是将矩阵A的第i列换成矩阵B的第i(i≤6)列所得的矩阵。将矩阵中的每组设计参数分别代入到目标函数中进行计算,可得到对应每组设计参数的输出响应值,由蒙特卡洛算法可以得到系统响应的方差估计和参数敏感性指标[11]:

2.4 结果分析
结合上述所取的目标函数以及Sobol全局灵敏度的蒙特卡洛计算方法,通过输入样本点得到A、B、Ci、C-i,计算出响应值,便可得到六个液压参数的灵敏度大小见表3和表4。

表3 垂直模态下液压参数的灵敏度值Tab.3 Sensitivity value of the hydraulic parameters in bouncemode

表4 侧倾模态下液压参数的灵敏度值Tab.4 Sensitivity value of the hydraulic parameters in rollmode
设计变量对系统响应的贡献一般由全局灵敏度的大小来衡量。因此,两种模态下六个设计变量的全局灵敏度大小对比见图4。

图4 六个设计变量在两种模态下的全局灵敏度Fig.4 Global sensitivity of the six design variables under twomodes
由表3可知,在垂直模态下,六个液压参数对加速度响应的全局灵敏度值大小排序为Za>Zb>Pa>Vc>Pc>Zv,对比一阶灵敏度和全局灵敏度,设计变量间存在交互作用,但都不明显。由表4可知,在侧倾模态下,六个液压参数对加速度响应的全局灵敏度值大小排序为Pa>Pc>Vc>Zv>Zb>Za,对比一阶灵敏度和全局灵敏度,设计变量间存在交互作用较大的是Pa、Pc、Vc。由图4可知,对垂直模态下的加速度响应影响较大的是Za、Zb,对侧倾模态下的加速度响应影响较大的是Pa、Vc、Pc。
由上述灵敏度分析结果可知,连接液压缸上下腔的阻尼阀对垂直振动的影响较大而对侧倾振动的影响较小;蓄能器及连接蓄能器的阻尼阀对侧倾振动影响较大而对垂直振动的影响较小;六个液压参数对侧倾响应的影响比对垂直响应的影响要大,并且不同的液压参数对两者的影响不同。这是由于车身垂直振动时,流进与流出蓄能器的油液较少,而大部分油液通过连接液压缸上下腔的阻尼阀在左右液压缸之间进行交换,所以垂直振动模态中,与蓄能器相关的设计变量对响应的影响都比较小。此时液压缸的作用主要是为垂直振动提供衰减振动的阻尼。而在车身侧倾运动中,车体在侧向力的作用下挤压或拉伸液压缸使得油液频繁的流进与流出蓄能器,此时液压油路的压力随之增大或者减小从而在液压缸处产生合力阻止车身的侧倾。在侧倾振动模态中,蓄能器存储和释放能量产生弹簧力和阻尼力,因此蓄能器及其与之连接的阻尼阀对侧倾响应的影响比较大。
3 结论
本文采用Sobol全局灵敏度分析法对影响液压互联悬架的关键液压参数进行了灵敏度分析,结论如下:
(1)在利用Sobol法计算全局灵敏度时,选取了蓄能器及阻尼阀的参数范围,通过向左右两车轮施加相同的路面激励,结合系统的频响函数得到了在垂直和侧倾两种模态下车身加速度响应的输出谱密度,从而确定了目标函数,最终得到典型液压参数对两种响应的灵敏度大小。
(2)对比各参数一阶灵敏度与全局灵敏度发现:连接液压缸上下腔的阻尼阀对垂直响应的影响较大,各参数间存在一定相互作用,彼此并非完全独立,但相互影响较小;蓄能器及连接蓄能器的阻尼阀对侧倾响应的影响较大,蓄能器参数之间的交互作用也比较明显;液压系统的参数对侧倾响应的影响比对垂直响应的影响大。
[1]Smith M C.Walker GW.Interconnected vehicle suspension[J].Proceedings of the Institution of Mechanical Engineers Part D:Journal of Automobile Engineering,2005,219(3): 295-307.
[2]Gay FR,Coudert N,Rifi I,et al.Development of hydraulic active suspension with feed forward and feedback design[C]//SAE Technical Paper,2000:2000-01-0104.
[3]Mace N.Analysis and synthesis of passive interco-nnected vehicle suspensions[D].Cambridge:University of Cambridge,2004.
[4]王增全,申焱华,杨珏.可控参数对连通式油气悬架性能影响[J].液压与气动,2011,10:8-11.
WANG Zeng-quan,SHEN Yan-hua,YANG Jue.Effect of controlled parameters on interconnect hydro-pneumatic suspension performances[J].Hydraulic and Pneumatic,2011 (10):8-11.
[5]Sobol IM.Sensitivity Estimates for nonlinear mat-hematical models[J].Math Model Comput Exp,1993:407-414.
[6]Zhang N,Smith W A,Jeyakumaran J.Hydraulica-lly interconnected vehicle suspension:background and modelling[J].Vehicle System Dynamics,2010,48(1):17-40.
[7]Newland D E.An introduction to random vibrations,spectral and wavelet analysis[M].3rd ed.London:Longman,1993.
[8]Dodds C J,Robson JD.The description of road surface roughness[J].Journal of Sound and Vibration,1973(31):175-183.
[9]Heath A N.Application of the isotropic road rou-ghness assumption[J].Journal of Sound and Vibration,1987(115): 131-144.
[10]丁玉庆,马幼鸣.货车振动系统频率响应的模拟[J].振动与冲击,2000,19(1):61-67.
DING yu-qing,MA You-ming.A frequency response simulation of truck system[J].Journal of Vibration and Shock,2000,19(1):61-67.
[11]张晓航.防空导弹武器装备体系作战效能全局敏感性分析方法研究[D].长沙:国防科学技术大学,2010.
G lobal sensitivity analysis of hydraulic system parameters to a hydraulically interconnected suspension's dynam ic responses
ZHOU Bing,GENG Yuan,HUANG Xiao-ting
(State Key Laboratory of Advanced Design and Manufacture for Vehicle Body,Hunan University,Changsha 410082,China)
A 4-DOF anti-roll half-carmodelwas used to derive amechanical-hydraulic coupled system's dynamic equations in frequency domain here.The system's frequency response functions and a road surface imputmodel were set up to achieve its responses,such as,bounce acceleration power spectral density and roll acceleration power spectral density.By applying amethod of global sensitivity analysis called Sobol,the levels of sensitivities of hydraulic parameters to bounce response and roll responsewere calculated.The obtained results indicated that the valves connected to hydraulic chambers have a large impact on bouncemodal vibration and the accumulator and the valves connected to itmake a large impact on rollmodal vibration.The study results provided a theoretical basis for car ride estimation and further parametric optimization of hydraulically interconnected suspensions.
hydraulically interconnected suspension;acceleration power spectral density;global sensitivity analysis;sobolmethod
U461
A
10.13465/j.cnki.jvs.2015.23.013
国家自然科学基金资助项目(51275162);吉林大学汽车仿真与控制国家重点实验室开放基金(20121109)
2014-09-16修改稿收到日期:2014-11-26
周兵男,博士,副教授,1972年生
耿元女,硕士生,1990年生
