基于贝叶斯理论的结构动力可靠度更新方法与分析
2015-05-25刘佩
刘 佩
(1.北京交通大学土木建筑工程学院,北京 100044;2.结构风工程与城市风环境北京市重点实验室,北京 100044)
基于贝叶斯理论的结构动力可靠度更新方法与分析
刘 佩1,2
(1.北京交通大学土木建筑工程学院,北京 100044;2.结构风工程与城市风环境北京市重点实验室,北京 100044)
通过一种基于结构动力测试数据和贝叶斯理论的方法来更新结构可靠度。该方法考虑了结构可能受到的激励和结构模型及其参数的不确定性,利用结构在服役期间的动力测试数据,通过贝叶斯概率方法对结构参数进行了识别。利用拉普拉斯渐近估计解法,对仅根据设计条件得到的结构可靠度进行了更新。对受随机动荷载作用的某桁架结构在三种情况下的可靠度进行了计算:一为仅考虑荷载的随机性,二为考虑荷载的随机性和结构模型参数的先验分布,三为考虑荷载的随机性和结构模型参数的更新分布。比较了实际结构和有限元模型更新后的自振频率和振型,并对更新的可靠度计算结果进行了分析。结果表明,与确定性名义模型的失效概率相比,测点处自由度的更新失效概率与真实值较为接近;未测试自由度的更新失效概率可能与真实值差别较大;增加测点数不一定改善失效概率的更新效果。
贝叶斯理论;动力可靠度;参数识别;失效概率;更新分布
在结构设计阶段,所有影响结构安全性评估的不确定性因素都应该考虑。由于结构模型不可能代表真实的结构,结构模型误差总是存在的,并且不存在模型参数的真实值。因此计算结构的可靠度时,除了考虑结构在服役过程中可能受到的随机激励的影响,还应考虑结构模型误差及模型参数的不确定性。
对结构可靠度的评估不仅在结构的设计阶段很重要,在结构的服役过程中也很重要。在服役过程中,由于结构的疲劳或者受到腐蚀,强风或地震引起结构构件或节点的损伤等原因,结构的状态会发生改变,可靠度可能会降低。因此,在结构建成后,需要通过监测结构的动力响应来对结构的模型参数及可靠度进行重新估计。
利用结构在服役期间测试得到的动力响应来对结构模型参数进行识别,并对结构可靠度进行重新评估,优势在于:测试时在结构工作状态下即可进行;计算时不需要对结构模型的边界条件进行假定;可能出现的结构材料及几何非线性也可以在测得的反应中体现出来。
对结构模型参数进行识别以及计算结构的可靠度时,应考虑结构模型误差及模型参数的不确定性。基于贝叶斯理论的系统识别方法[1-2]通过建立结构模型误差的概率模型对结构模型的不确定性进行定量的描述,不仅可以得到指定动力荷载下更精确的结构反应,而且可以定量评估该精度,已被应用在结构模型修正及可靠度计算[3-4]、模态参数识别[5-9]、模型参数识别[10,11]、损伤识别[12-13]等方面。
基于贝叶斯理论和结构动力测试数据更新结构的可靠度,该方法可同时考虑结构所受随机激励以及结构模型和结构参数的不确定性。对某桁架有限元模型在随机动荷载作用下三种情况的可靠度进行了计算:①采用确定性模型参数时,结构在随机荷载作用下的可靠度。②考虑结构模型参数的先验分布,结构在随机荷载作用下的可靠度。③利用结构反应测试数据更新结构模型参数的概率分布后,结构在随机荷载作用下的可靠度并将结构模型更新后的模态参数与实际情况进行了对比,对可靠度计算结果与测点位置和测点数的关系进行了讨论。
1 基于贝叶斯理论更新结构模型参数
由于结构在服役期间特性可能发生改变,故可以利用结构的动力反应测试数据对结构的模型参数进行更新。模型参数的更新可以通过基于贝叶斯理论的系统识别法进行,该方法对结构模型参数及反应误差进行概率描述,可以考虑由于测试噪声及模型误差引起的不确定性。
假定结构模型参数为θ;q(n;θ)表示在tn时刻结构模型中N0个自由度的反应,tn=nΔt,n=1,…,N,N为数据点数;y(n)表示在tn时刻结构中N0个自由度观测到的反应;则y(n)=q(n;θ)+e(n;θ),其中e(n;θ)为反应预测误差,可通过参数σ表示。测试噪声相比模型误差要小很多,故仅考虑模型误差对结构反应预测误差的影响。
根据贝叶斯理论,设结构模型参数的先验概率密度函数为f(θ),得到测试数据y后,结构模型参数的后验概率密度函数(即更新的概率密度函数)

式中:k=1/f(y),f(y|θ)为似然函数,此概率密度函数与模型误差e(n;θ)有关。假定模型误差的概率模型为离散高斯白噪声过程,其各元素相互独立,均值为0,标准差为σ。则似然函数
对式(4)进行最小化运算,可得模型参数的最有可能值θ^及对应的模型误差标准差的最有可能值。
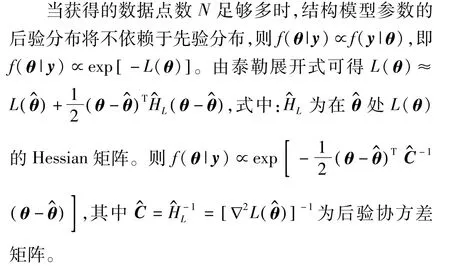
当存在唯一的模型参数最有可能值时,即为全局可识别问题时,模型参数更新的概率密度函数可以通过高斯分布进行估计,其均值为最有可能值θ^,协方差矩阵可通过负对数似然函数的Hessian矩阵求得。
2 结构可靠度计算
2.1 确定性模型参数时的可靠度
若已知确定性的模型参数时,结构在随机激励下的失效概率为P(F|θ),可通过Monte-Carlo法计算得到。
2.2 考虑模型参数先验分布的可靠度
若考虑结构模型参数的不确定性,且结构实际的反应数据未知,可直接依据结构模型参数的先验概率密度函数,由全概率定理得失效概率为:

式中:f(θ)可根据工程经验选择方便计算的数学形式。该失效概率可以根据拉普拉斯渐近估计解法求得[14]。令负对数似然函数l(θ)=-ln P(F|θ)-ln f(θ),对l(θ)进行最小化运算,可得模型参数的最有可能值θ,则失效概率

当模型参数服从正态分布时,模型参数的最有可能值为模型参数的均值,由式(6)得失效概率

故结构实际的反应数据未知时,结构的失效概率可通过结构模型参数的最有可能值近似计算得到。
2.3 考虑模型参数后验分布的可靠度
若考虑结构模型参数的不确定性,且得到结构实际的反应数据后,可根据结构模型参数的后验分布,由全概率定理得更新的失效概率为:

该失效概率可根据拉普拉斯渐近估计解法求得。当为全局可识别情况时,式(8)可写为
故得到结构实际的反应数据后,结构更新的失效概率可通过结构模型参数的最有可能值近似计算得到。
3 桁架结构的更新可靠度计算与分析
某桁架结构由7根杆件及5个节点构成,具体尺寸、节点编号、杆件编号、自由度编号见图1。结构在节点1处有水平和竖直方向上的位移约束,在节点3处有竖直方向上的位移约束。假定结构无阻尼,质量密度ρ=2 700 kg/m3,杆件截面面积为A=0.001 m2,令E=5×1010Pa,杆件单元1-7的弹性模量分别为(0.6,0.6,0.7,0.8,0.7,0.8,0.9)E。

图1 桁架结构示意图Fig.1 Figure of the trussmodel
为了进行设计阶段的分析,需要建立桁架结构名义上的有限元模型。名义模型是对结构进行设计时采用的理想模型,它不是实际的结构。为了模拟模型误差对结构反应的影响,所选名义模型可与实际结构明显不同。所选名义模型一:各杆件单元的弹性模量均取0.5E;名义模型二:各杆件单元的弹性模量均取0.8 E;名义模型三:各杆件单元的弹性模量均取E。三个名义模型的截面面积为A,质量密度为ρ,无阻尼。
下面主要讨论利用桁架结构在服役期间的振动反应测试数据,考虑结构模型参数及模型误差的不确定性,对结构的可靠度进行更新。
3.1 测点处自由度的可靠度更新
假定在该桁架结构的第2节点作用有动荷载B sin(20πt),其中B~N(40 kN,5 kN),B的各样本相互独立,时间间隔Δt=0.01 s,持续时间为10 s。令位移界限值b=16 mm,计算该桁架结构在以下三种情况下第2自由度位移的失效概率:
(1)假定弹性模量为确定值,仅考虑荷载的随机性。
利用Monte-Carlo法,生成1 000个样本,计算得实际结构、名义模型一、名义模型二、名义模型三的失效概率见表1。名义模型一各杆件的轴向刚度比实际结构各杆件的轴向刚度小,失效概率比实际结构的失效概率大;名义模型三各杆件的轴向刚度比实际结构各杆件的轴向刚度大,失效概率比实际结构的失效概率小;名义模型二的失效概率与实际结构的失效概率比较接近,但偏小。
(2)考虑弹性模量的先验分布及荷载的随机性。
假定桁架结构模型各杆件的弹性模量相等,且其先验分布为正态分布,均值为0.7 E,变异系数为0.2。利用式(7),生成1 000个样本,计算得更新前模型的失效概率见表1,与实际的失效概率相比偏大。由于模型参数先验分布的选取依赖于工程经验,故应通过测试数据对其更新后再用于计算。
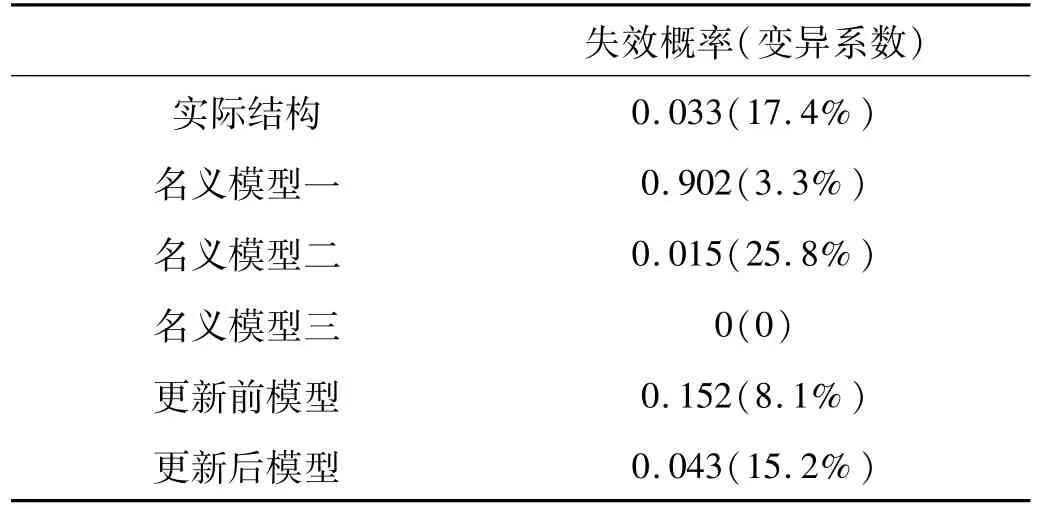
表1 桁架结构模型第2自由度位移的失效概率Tab.1 Displacement failure probabilities of the 2nd DOF of the trussmodel
(3)利用弹性模量的后验分布及荷载的随机性。假定对该桁架结构在服役过程中第2自由度的位移进行了测试。设此时荷载为B sin(20πt),B=30 kN,时间间隔Δt=0.01 s,持续时间为10 s,所测得结构反应为模型计算反应加上10%均方差的高斯噪声(见图2)。
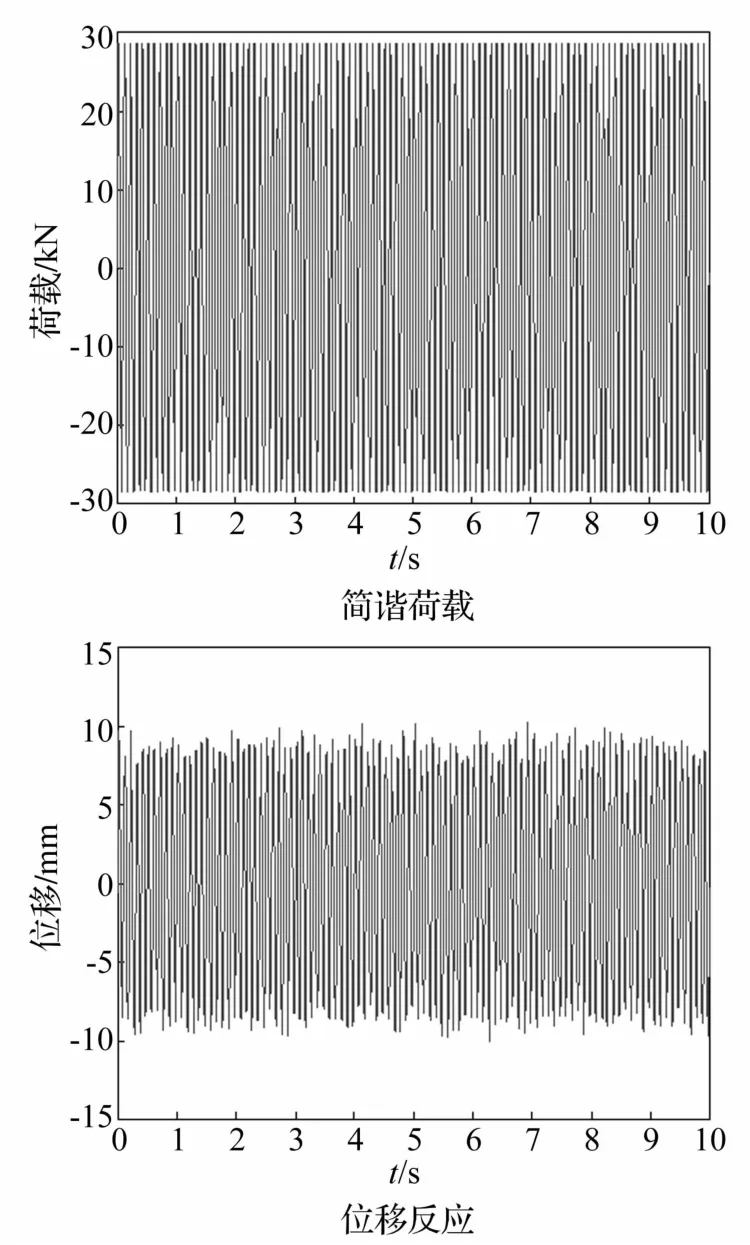
图2 测试所得结构所受荷载及位移反应Fig.2 Tested loading and displacement histories of the truss
若令更新后桁架结构模型各杆件的弹性模量不等,则待识别的模型参数为7个,此种情况为不可识别问题。因此令桁架结构模型各杆件的弹性模量相等,利用贝叶斯参数识别方法,根据式(4)识别得到弹性模量的最有可能值为3.820×1010Pa(0.76 E),标准差为3.733×109Pa,变异系数为0.07。模型误差标准差的最有可能值为20 mm。弹性模量更新前后的概率密度函数见图3,弹性模量更新后变异系数减小,更新效果显著。
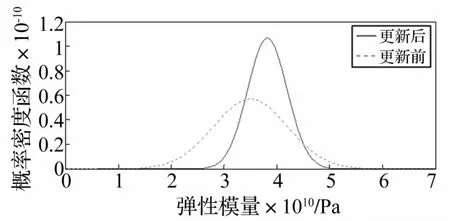
图3 弹性模量更新前后的概率密度函数Fig.3 Prior and posterior probability density function curves of elastic modulus
利用模型参数的更新分布生成100个样本,利用这些样本统计得到结构模型的自振频率的均值及方差。各阶频率的均值加减三倍标准差的范围见表2,可以看出实际结构的各阶自振频率均位于对应的范围内。
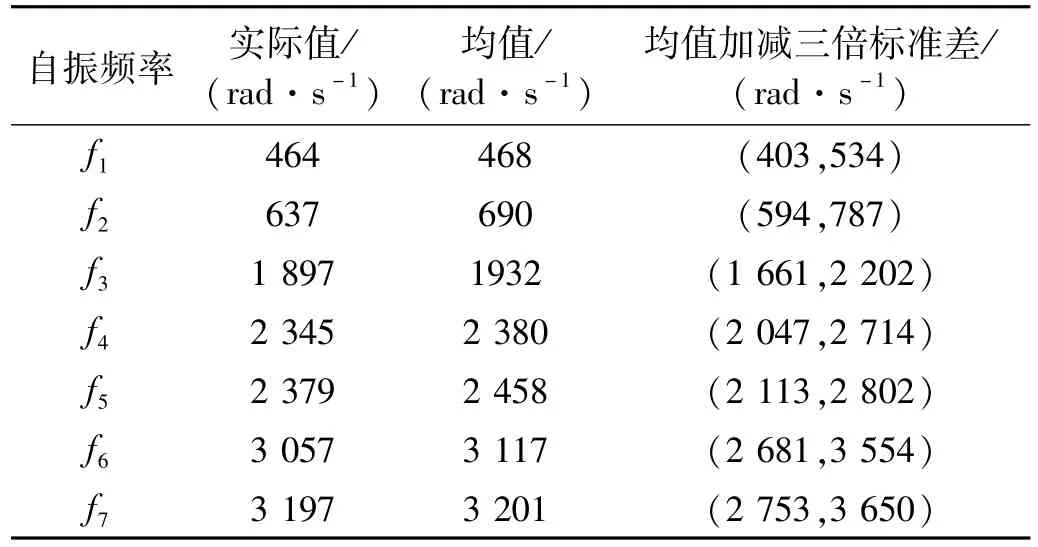
表2 桁架结构模型更新后的自振频率范围Tab.2 Natural frequency intervals of the updated trussmodel
根据模态保证准则(MAC)[15],两个振型向量u和v之间的MAC可以表示为
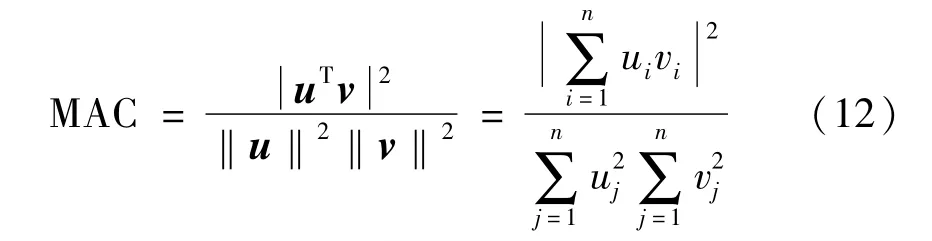
MAC的范围为0~1,MAC越大,两个振型的一致性越高。模型更新后取最有可能值时的振型与实际振型之间的MAC见图4,可以看出模型更新后取最有可能值时的前三阶振型与相应的前三阶实际振型之间的MAC接近于1,一致性很好,后四阶振型的一致性比前三阶振型略差。
利用式(9),生成1 000个样本,计算得更新后的失效概率见表1,其与实际的失效概率比较接近,并且偏于保守。从表1中的失效概率可以看出,无论采用哪个名义模型,只要利用结构在服役期间的反应数据对模型参数进行更新,都可以得到与实际失效概率吻合较好的结果。
从确定性的模型参数,到考虑模型参数的先验分布,再到考虑模型参数的更新分布,反应了对模型不确定性认识水平的逐步提高。
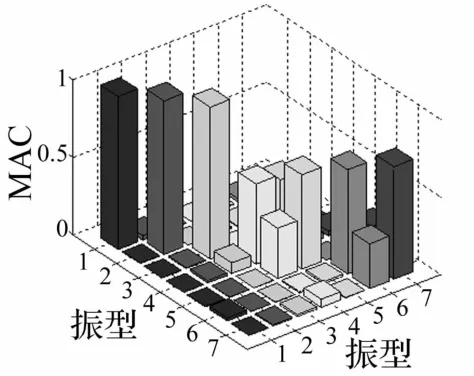
图4 更新后振型与实际振型之间的MACFig.4 MAC between the updated and actualmode shape
3.2 未测试自由度的可靠度更新
若利用测得的第2自由度的位移反应,对其它自由度的位移失效概率进行更新,计算结果见表3。若在同样的荷载下仅测试得第3自由度的位移反应(模型计算反应加10%均方差的高斯噪声),对其它自由度的位移失效概率进行更新,计算结果见表4。
结果表明,未测试自由度的更新失效概率与相应的实际失效概率可能相差较大。这是因为利用测试数据得到的模型参数最有可能值是利用测试自由度的反应误差最小得到的,而由更新的模型参数得到的未测试自由度的反应则可能与实际反应相差较大。若未测试自由度的反应小于测试自由度处的反应,则其更新失效概率小于实际失效概率,偏于不安全;若未测试自由度的反应大于测试自由度处的反应,则其更新失效概率大于实际失效概率,偏于保守。
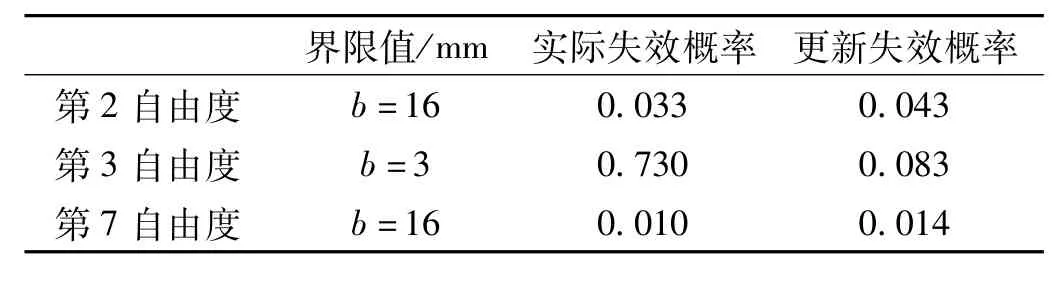
表3 测得第2自由度反应时的位移失效概率Tab.3 Displacement failure probabilities with known tested displacements of the 2nd DOF

表4 测得第3自由度反应时的位移失效概率Tab.4 Disp lacement failure probabilities with known tested disp lacements of the 3rd DOF
3.3 利用多个自由度反应的可靠度更新
若同时测得第2和第7自由度的位移反应,利用这两个自由度的反应识别得到弹性模量的最有可能值为3.824×1010Pa(0.76 E),标准差为3.742×109Pa,变异系数为0.10,模型误差标准差的最有可能值为28 mm。此时弹性模量的标准差、模型误差标准差的最有可能值,比仅利用第2自由度反应得到的值略有增大。
利用模型参数的更新分布生成100个样本,利用这些样本统计得到结构模型自振频率的均值及方差。各阶频率的均值加减三倍标准差的范围,比仅利用第2自由度反应得到的范围扩大。弹性模量改变,刚度矩阵线性变化,模型更新后取最有可能值时的振型与实际振型之间的MAC值与图4各值相同。由于模型假定各杆件的弹性模量相等,与实际结构不同,无论弹性模量取何值,都得不到与实际结构各阶振型都有很好一致性的振型。
利用模型参数的更新分布得第2和第7自由度的更新失效概率见表5。可以看到,第2和第7自由度的更新失效概率与实际失效概率比较接近,并且偏于保守。

表5 测得第2和第7自由度反应时的位移失效概率Tab.5 Displacement failure probabilities with known tested disp lacements of the 2nd and 7th DOFs
若同时测得第2、第3、第7自由度的位移反应,利用这三个自由度的反应对失效概率进行更新。此时弹性模量的标准差、模型误差标准差的最有可能值继续增大,模型更新后各阶自振频率的均值加减三倍标准差的范围扩大,各阶振型不变。此时计算所得的更新失效概率见表6,可以看到,第2和第7自由度的更新失效概率与实际失效概率比较接近,并且偏于保守;由于各自由度的反应相差较大,第3自由度的更新失效概率与实际失效概率相差较大。因此,增加测试自由度数不一定提高失效概率的修正效果。
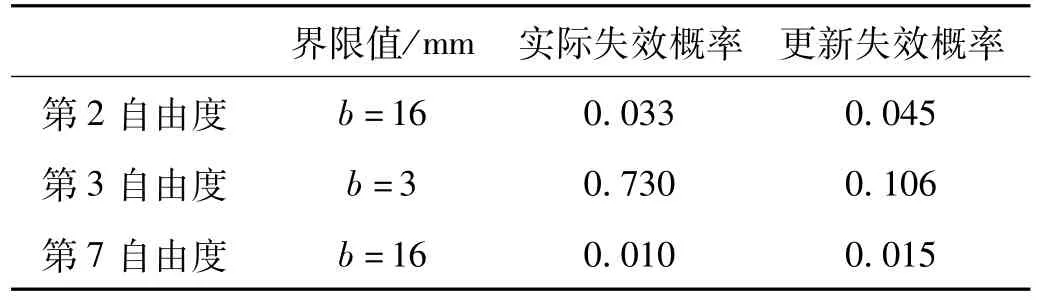
表6 测得第2、第3、第7自由度反应时的位移失效概率Tab.6 Disp lacement failure probabilitieswith known tested displacements of the 2nd,3rd and 7th DOFs
4 结 论
设计阶段所采用的名义上的有限元模型不是实际的结构,也不能反映实际结构在服役过程中的损伤退化,故应考虑模型误差对结构可靠度的影响。对结构进行健康监测,利用其在服役期间的振动反应数据及贝叶斯参数识别方法,可更新结构的可靠度,更准确的评估结构的安全性。
以某桁架结构为例,利用其在服役期间所得振动反应数据及贝叶斯参数识别方法,计算其在未来随机荷载作用下的动力可靠度。结果表明:
(1)利用结构在服役期间某自由度的反应数据对模型参数进行更新,无论采用的确定性名义模型的参数取值大小,在测试自由度处都可以得到与实际结构失效概率吻合较好的结果。
(2)在未测试自由度处的更新失效概率与相应的实际失效概率可能相差较大:若未测试自由度的反应小于测试自由度处的反应,则其更新失效概率小于实际失效概率,偏于不安全;若未测试自由度处的反应大于测试自由度处的反应,则其更新失效概率大于实际失效概率,偏于保守。
(3)由于各自由度的反应可能相差较大,增加测点数不一定改善失效概率的更新效果。
因此,建议对于桁架结构,在实际工程中,可有针对性的选择结构的可能失效部位进行动力响应测试,并利用该测试数据对该位置的可靠度进行更新。
[1]Beck JL,Katafygiotis L S.Updatingmodels and their uncertainties.I:Bayesian statistical framework[J].Journal ofEngineering Mechanics,1998,124(4):455-461.
[2]Beck JL.Bayesian system identification based on probability logic[J].Structural Control and Health Monitoring,2010,17(7):825-847.
[3]Papadimitriou C,Beck JL,Katafygiotis L S.Updating robust reliability using structural test data[J].Probabilistic Engineering Mechanics,2001,16(2):103-113.
[4]Soyoz S,Feng MQ,Shinozuka M.Structural reliability estimation with vibration-based identified parameters[J].ASCE Journal of Engineering Mechanics,2010,136(1):100-106.
[5]Katafygiots L S,Yuen K V.Bayesian spectral density approach for modal updating using ambient data[J].Earthquake Engineering and Structural dynamics,2001,30(8):1103-1123.
[6]Au SK.Fast Bayesian FFTmethod for ambientmodal identification with separated modes[J].ASCE Journal of Engineering Mechanics,2011,137(3):214-226.
[7]Au SK,Zhang F L.Ambientmodal identification of a primary-secondary structure by Fast Bayesian FFT method[J].Mechanical Systems and Signal Processing,2012,28(4):280-296.
[8]易伟建,吴高烈,徐丽.模态参数不确定分析的贝叶斯方法研究[J].计算力学学报,2006,23(6):700-705.
YIWei-jian,WUGao-lie,XU Li.A study on the uncertainty ofmodel parameters by Bayesian method[J].Chinese Journal of Computational Mechanics,2006,23(6):700-705.
[9]Au SK,Zhang F L.On assessing the posteriormode shape uncertainty in ambientmodal identification[J].Probabilistic Engineering Mechanics,2011,26(3):427-434.
[10]Liu P,Au SK.Bayesian parameter identification of hysteretic behavior of composite walls[J].Probabilistic Engineering Mechanics,2013,34(10):101-109.
[11]Yuen K V,Beck J L.Updating properties of nonlinear dynamical systems with uncertain input[J].ASCE Journal of Engineering Mechanics,2003,129(1):9-20.
[12]易伟建,周云,李浩.基于贝叶斯统计推断的框架结构损伤诊断研究[J].工程力学,2009,26(5):121-129.
YIWei-jian,ZHOU Yun,LI Hao.Damage assessment research on frame structure based on Bayesian statistical inference[J].Engineering Mechanics,2009,26(5):121-129.
[13]Sohn H,Law K H.A Bayesian probabilistic approach for structure damage detection[J].Earthquake Engineering and Structural dynamics,1997,26(12):1259-1281.
[14]Papadimitriou C,Beck JL,Katafygiotis L S.Asymptotic expansions for reliability and moments of uncertain systems[J].ASCE Journal of Engineering Mechanics,1997,123(12):1219-1229.
[15]Şahin A,Bayraktar A,Øzcan D M,et al.Dynamic field test,system identification,and modal validation of an RC Minaret:Preprocessing and postprocessing the wind-induced ambient vibration data[J].ASCE Journal of Performance of Constructed Facilities,2011,25(4):336-356.
Structural dynam ic reliability updating method based on Bayesian theorem
LIU Pei1,2
(1.School of Civil Engineering,Beijing Jiaotong University,Beijing 100044,China;2.Beijing's Key Laboratory of StructuralWind Engineering and Urban Wind Environment,Beijing 100044,China)
An approach based on Bayesian theorem and structural vibration test data was presented for reliability updating.The approach takes account of uncertainties of the excitation,structuralmodel and its parameters.Structural model parameters were identified based on the vibration test data and Bayesian parameter identification.According to Laplace asymptotic approximation,the dynamic reliability estimated purely in the light of design conditionswas updated.The reliabilities of a truss structure subjected to dynamic random loading were calculated for three cases.Only the uncertainty of the loading was considered for the first case.The uncertainties of the loading and the prior probability distribution ofmodel parameters were considered for the second case.The uncertainties of the loading and the updated probability distribution ofmodel parameterswere considered for the third case.Natural frequencies andmode shapes of the actual structure and the updatedmodelwere compared.Discussions about the updated reliabilitiesweremade.The results show that the updated failure probability of the tested DOF agrees better with the actual value compared with that by deterministic nominal models.The updated failure probability of untested DOFs may deviate from the actual values.Increasing tested DOFsmay have no effect on the updated failure probability.
Bayesian theorem;dynamic reliability;parameter identification;failure probability;updated probability distribution
TU311
A
10.13465/j.cnki.jvs.2015.12.006
中央高校基本科研业务费(2014JBM100)资助项目
2014-02-19 修改稿收到日期:2014-05-27
刘佩 女,博士,副教授,1982年生