倒装热压键合设备中热气流对视觉定位系统影响研究
2015-05-16韩微微赵万利
韩微微,赵万利,李 恺
(1.北京中电科电子装备有限公司,北京100176;
2.光电信息控制与安全技术重点实验室,河北三河065201)
倒装热压键合设备中热气流对视觉定位系统影响研究
韩微微1,赵万利2,李 恺1
(1.北京中电科电子装备有限公司,北京100176;
2.光电信息控制与安全技术重点实验室,河北三河065201)
利用加热装置对晶片样片进行加热,采用机器视觉定位系统对晶片进行拍照采样,并利用图像处理软件进行位置识别,分析了在加热对图像定位系统的影响,并采取了措施降低热气流的影响,取得了比较满意的结果。
封装设备;倒装热压键合;热气流;视觉定位
由于机器视觉系统具有精确度高,重复性好,速度快,成本低的特点,广泛用于工业设备中。应用时,需要利用机器视觉系统对样本进行定位,以便对样片进行下一步动作或处理。在倒装热压键合设备中,对经过加热的高温度晶片及基板的定位精度直接影响成品质量。该定位精度要求很高,通常在微米量级。而加热时所产生的流动热空气对光线的偏折,使得机器视觉定位变得困难。本文使用以倒装晶片为样本进行加热试验,采集了将晶片加热至140℃时的大量图像,通过计算机图像处理软件进行处理,识别晶片上的凸点,得到在试验条件下热气流对机器视觉定位准确性影响分布,并进行分析。采取排除热空气的方法降低热气流的影响,取得了满意的结果。
1 机器视觉定位原理
1.1 机器视觉定位系统的模型
机器视觉定位系统将样片表面反射的光线经光学镜头及相机成像,使用图像采集卡传输到计算机,并利用数字图像处理软件进行处理、分析,得到样片的图像、位置等信息,再传送给主控制程序,以便进行下一步动作。图1为典型的图像定位系统的结构示意。
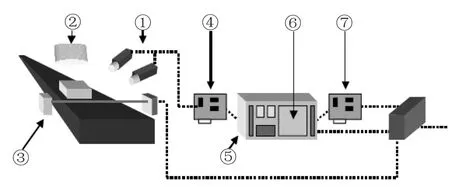
图1 图像定位系统的结构示意图
典型的机器视觉定位系统包括:
①成像器件-相机与镜头,②辅助成像器件-光源,③传感器,④图像采集卡,⑤计算机平台,⑥视觉处理软件,⑦控制单元
1.2 热空气对视觉定位系统的影响
样片表面反射的光线如果能够直线传播,那么在成像过程就可以得到清晰,稳定的图像。根据光的直线传播定律,光线在均匀介质里沿直线传播。直线传播定律决定了在均匀介质中,可以通过成像系统对样品进行清晰成像。但在非均匀介质中光线因折射而发生弯曲。在倒装热压键合设备中,光线从晶片到镜头前端的传播路径中,空气的折射率因晶片被加热而改变。
在理论上,空气折射率与空气密度、水蒸气的折射率、空气中二氧化碳的含量等因素有关。根据1966年的埃德林(Edlen)(公式1),及Birch和Downs在1993年对该公式的修改(公式2)[1],可以看出在其他条件不发生变化的情况下,空气温度的与空气折射率的关系。
公式(1)是标准干燥空气在标准状态下(t= 15℃,P=0.1 MPa)的色散公式。公式中(n-1)s表示标准状态下的空气折射率,R是真空中的波数。公式2中(n-1)tp是标准干燥空气在温度t(以℃为单位),压力P(以Pa为单位)时的折射率。在试验条件下,认为试验时空气为标准干燥空气,压力P不发生变化。因此有,在温度升高时,空气折射率随之减小。
晶片附近的空气被加热,温度升高,与周围的冷空气由于热传递而形成对流,而该对流不稳定形成湍流,加上周围空气的流动,导致空气这个传播介质内部的折射率一直在随机发生变化,处于不稳定状态,产生湍流效应。使得通过其中的光束发生漂移、丢失,造成图像模糊,抖动,数据丢失等退化,给图像识别定位带来困难,见图2所示。
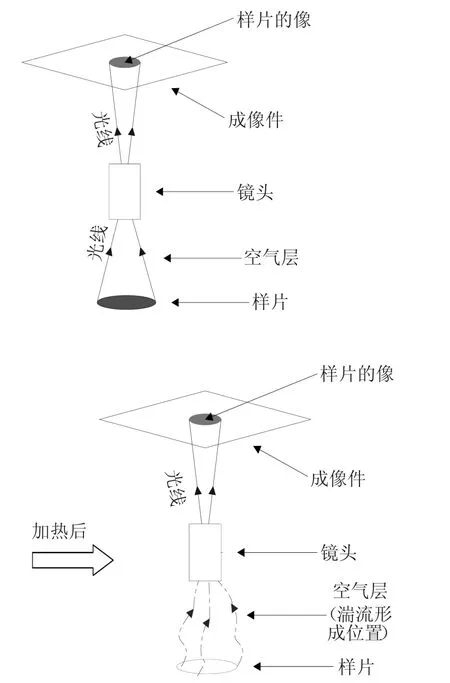
图2 加热空气层示意图
2 解决途径
对于这种湍流造成的图像退化的现象可以通过以下几种途径解决或者降低其影响:
(1)对得到的湍流图像进行处理。目前在国内外对湍流图像复原技术,主要有3种图像复原方式。a.建立退化模型,在退化模型确定和已知的情况下,利用逆滤波或维纳滤波等方法恢复图像;b.幸运成像,多次成像。按照一定的标准将拍摄图像中一些接近衍射极限的好图像选取出来再进行配准叠加;c.多帧图像重建,多次成像。对所拍摄的图像序列进行平均化处理,然后利用非感性图像配准技术所得的图像进行配准,得到图像的变形矩阵,利用贝叶斯图像重建算法对图像进行重建,从而得到更加清晰的图像[3]。
(2)从湍流形成原因入手,消除湍流。如果使光的传播路径内呈真空状态,则加热晶片不造成热空气流动,排除湍流,就完全阻隔了空气对成像质量的影响。
(3)消除热空气。使得晶片到镜头的空气层充满温度一致的常温状态下的空气,即使有湍流存在,在空气折射率仍为定值的情况下,也不会对成像产生严重的影响。
以上方法中,方法(1)对图像处理的3种方式需要大量的计算,重复的拍照,准确性,实时性很差,不适合用于要求效率很高的倒装热压键合设备中。方法(2)需要将设备的机械手、晶片台等多个部件进行密封,实施困难,且成本较高。综合以上原因分析,本文中使用了方法(3)的原理进行设计与实验,得到了好的效果。
3 热气流影响分析及解决方法
3.1 实验设计
为了对这种现象进行研究,建立实验,实验架构示意图如图3所示。
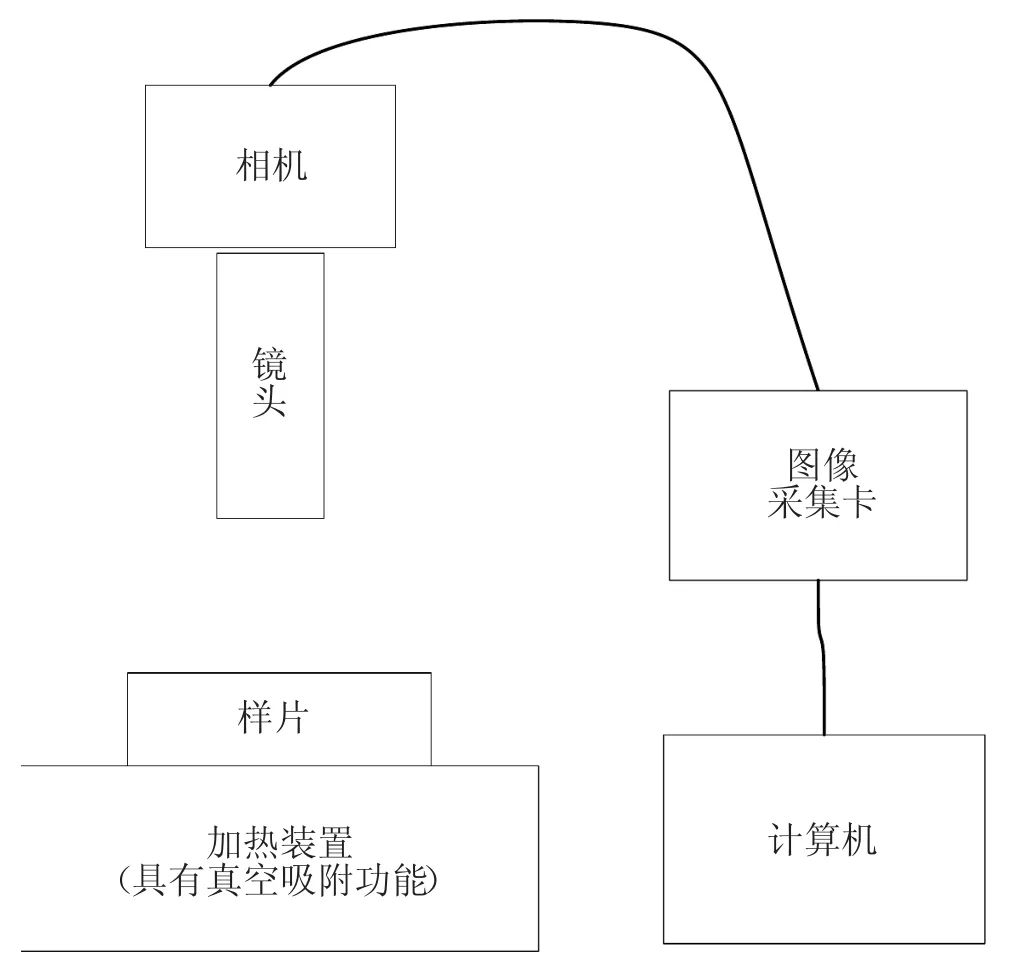
图3 实验架构示意图
实验时,为了防止样片在实验过程中发生位移而使数据失去真实性,整个实验装置固定在光学平台上,并使用真空吸附装置固定样片。根据倒装热压键合设备中对定位精度的要求,成像器件中,镜头采用6倍远心显微镜头,分辨率3 μm,采用远心镜头的目的是防止因为物距变化造成放大倍率的变化,影响测试结果。相机采用五百万像素的CCD相机,像素尺寸为3.75 μm。并具有全局快门技术以防止图像变形。系统像素分辨力Lp与CCD像元尺寸S、镜头放大倍数E有如下关系:

带入各个参数,得出拍照得到的图像像素分辨率为0.625 μm。
在图像处理方面,采用技术成熟的创科图像处理软件,利用基于形状的边缘检测算法对晶片图像位置进行分析。该分析方法精度可达到1/4像素。
综合以上实验条件,该实验中,数据分析精度可达0.156 μm,完全能够满足实际应用中对精度的要求。
3.2 加热对图像定位的影响研究
实验时,首先采集加热前晶片图像作为原始图像,然后对晶片加热到140℃后,再多次采集图像,图中分别展示了室温下及加热后的晶片图像,见图4所示。
从图4中可以看出,加热后图像变的更加模糊,也给图像处理带来困难。
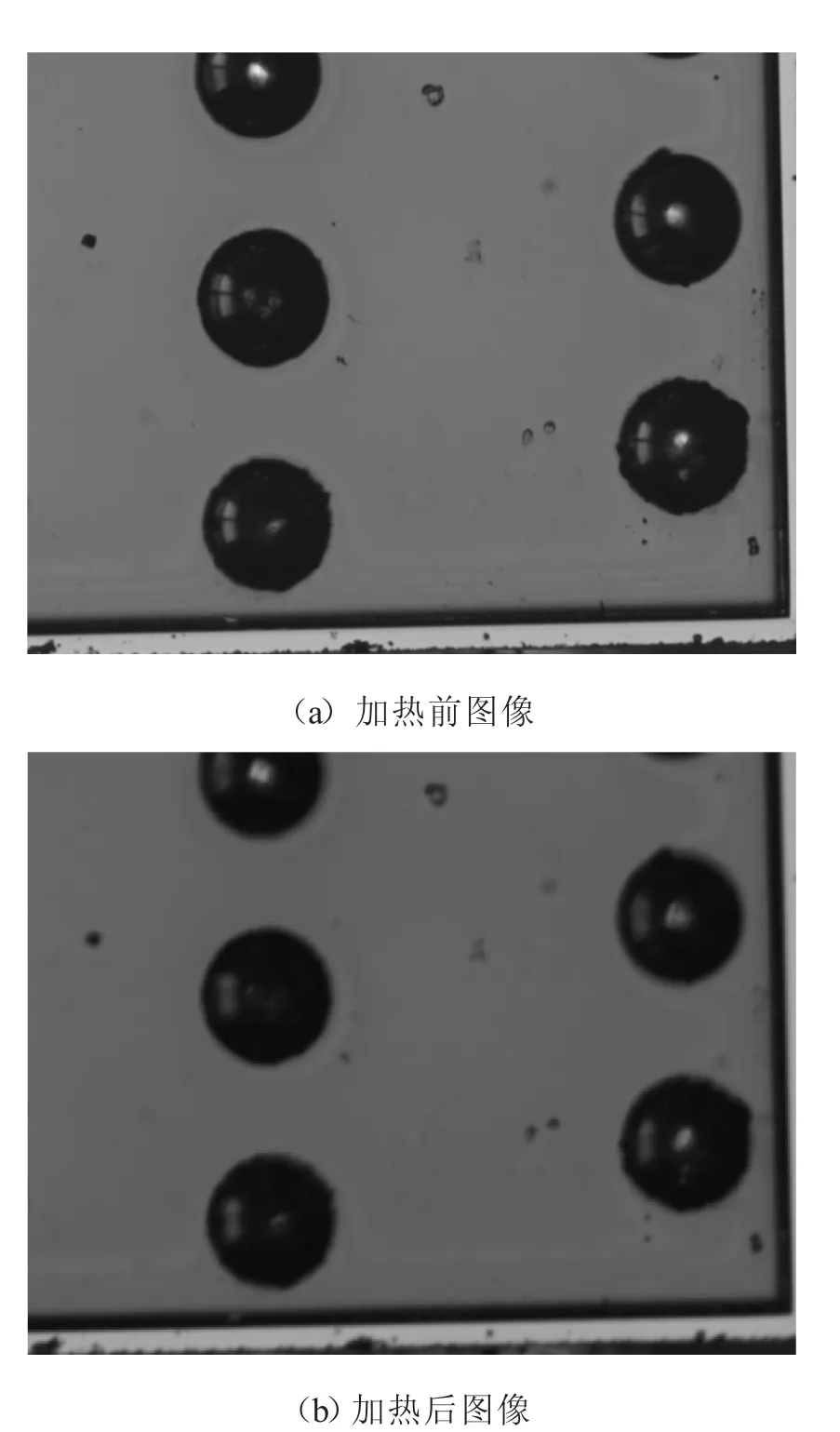
图4 加热前后图像数据对比
共采集加热后的图像50幅,使用图像处理软件进行处理,选取未加热时图像上的凸点作为模板(如图4),进行匹配识别。识别加热后图像上凸点的位置,并计算该位置与加热前的模板位置坐标偏差,并换算至长度单位,得到数据绘制散点图如图5所示。
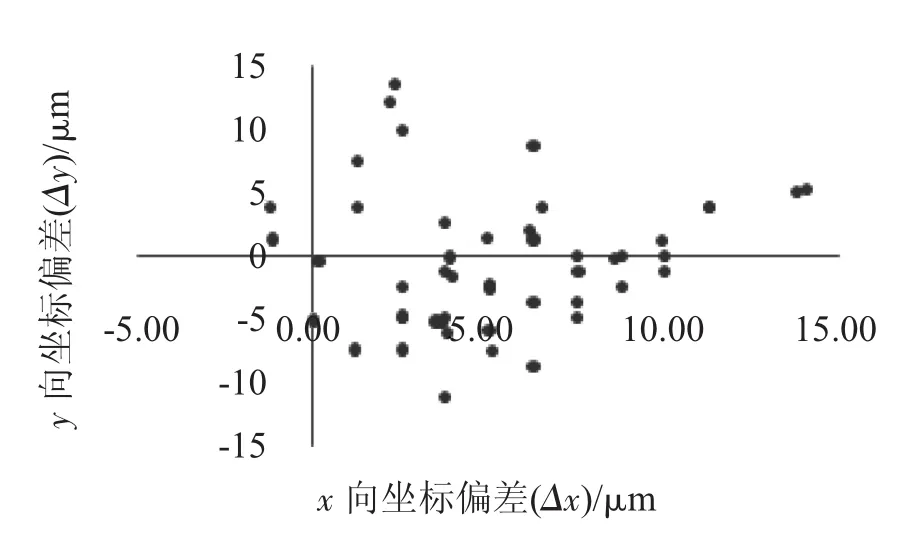
图5 加热后位置偏移数据散点图
该组数据中,x方向坐标偏移值最大为14 μm,y方向偏移值最大为13.57 μm,已经超出设备设计时的精度误差允许范围。为了减小定位误差,本文中采用在光路侧方加入吹气和吸气装置的方法以达到这一目的。
3.3 装置设计
为达到此目的,设计了如图6所示的装置。
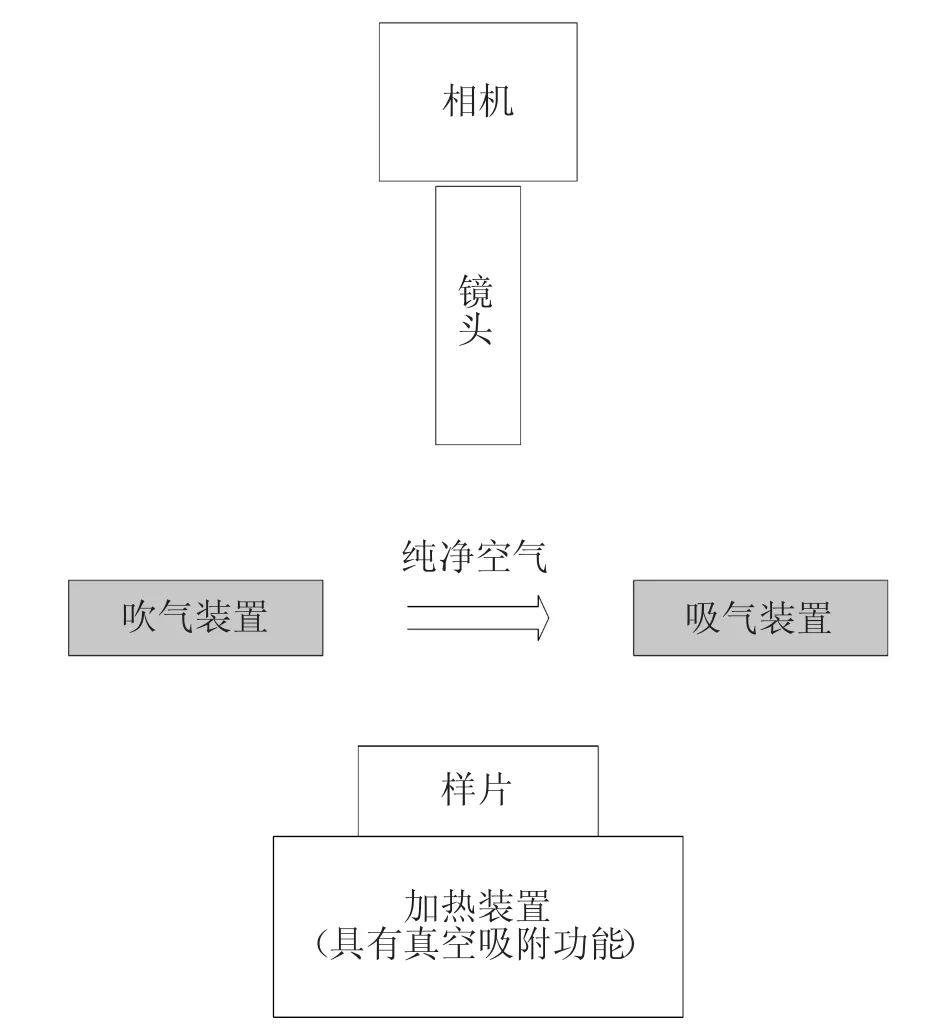
图6 实验装置示意图
实验中,吹气装置如图6中所示,采用一排小圆孔进行吹气,鸭嘴形扁圆口进行吸气,小圆孔直径为2 mm,共6个,间距4 mm,鸭嘴形吸口为2 mm×20 mm,气压为0.3 MPa,见图7。
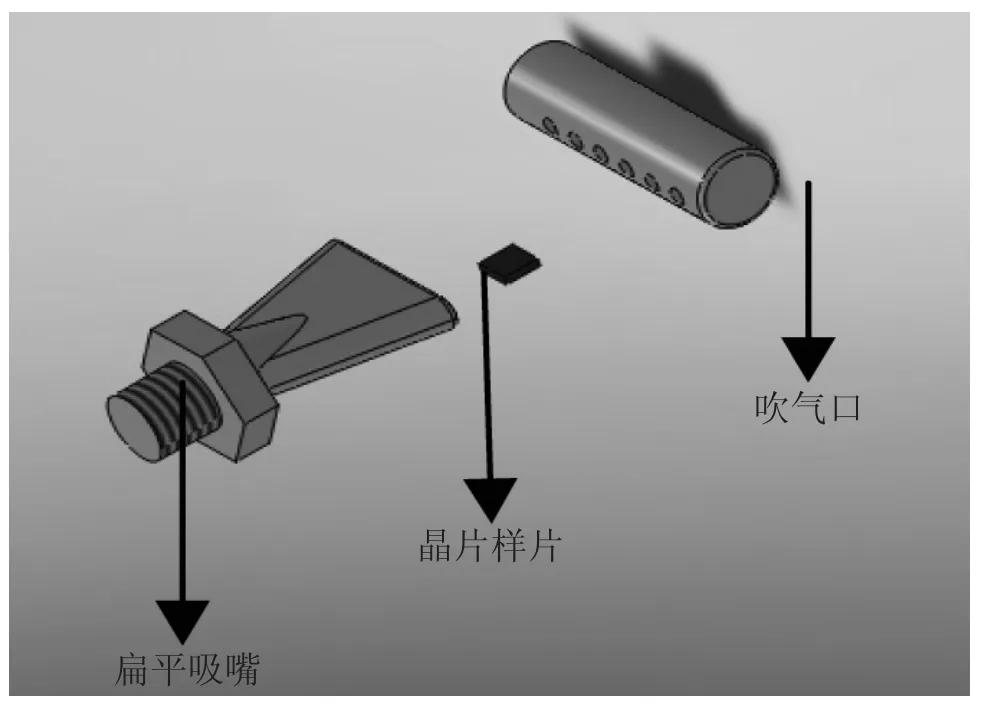
图7 吹气及吸气口末端模型图
实验时首先采集晶片未加热时图像,再对晶片加热到140℃,之后启动吹气及吸气装置,再采集图像进行处理与分析,得到图像及坐标散点图见8所示。
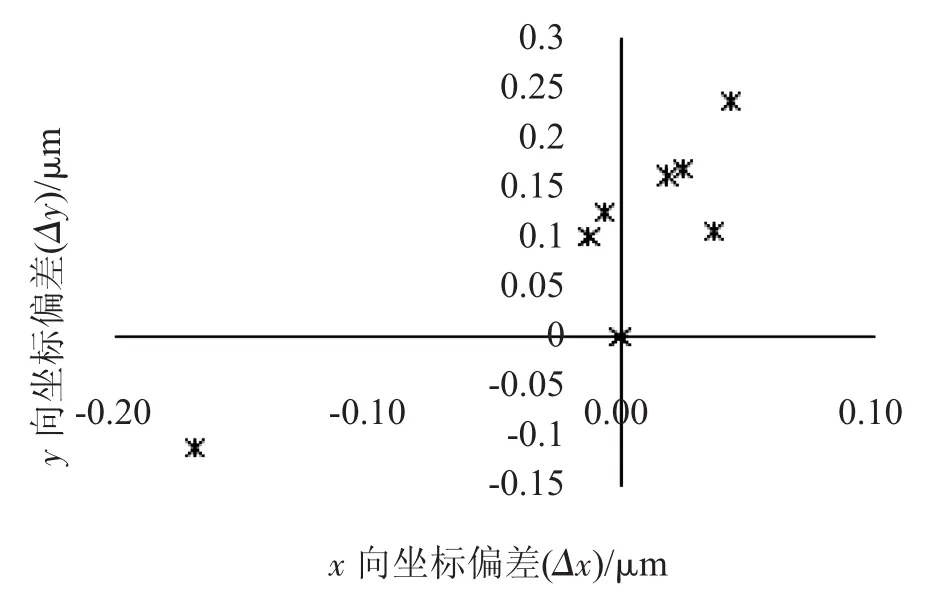
图8 加排气装置后位置偏移数据散点图
其中有绝大多数的数据点因与坐标原点重合而在图中无法显示,从该组数据中可以看出,图像采集得到的坐标偏差很小,最大为x方向0.17 μm,y方向为0.24 μm,能够符合应用需求。
4 结 论
本文分析了倒装热压键合设备中,热压系统使视觉定位系统产生误差的原因,阐述了多种对这种现象进行解决方式,并利用加热装置对晶片样片进行加热,利用数字图像处理软件对得到的图像数据进行处理,设计了排除热空气的装置,并检验了其有效性,能够满足倒装热压键合设备目前的应用需求。
[1] 倪育才,空气折射率埃德林公式的修改[J].计量技术,1998(3):22-27.
[2] 戚康男,秦克城.统计光学导论[M].天津:南开大学出版社,1987.592-630.
Study of Hot Airstream Effect on Machine Vision System in Flip Chip Hot-Press Bond Equipment
HAN Weiwei1,ZHAO Wanli2,LI Kai1
(1.CETC Beijing Electronic Equipment CO.,LTD,Beijing 100176,China
2.Science And Technology On Electro-Optical Information Security Control Laboratory,Sanhe 065201,China)
Machine Vision system and image software is used to posit hot chip.Paper analyzed the hot airstream effect on the vision system,raised a method and designed a device to avoid the effect.
Encapsulated Equipment;Flip chip hot-press bond;Hot stream;Machine vision
TN405.96
B
1004-4507(2015)01-0025-05
韩微微(1981-),女,工程师,硕士,从事电子专用设备研制开发工作。
2014-12-23