基于土层识别的盾构刀盘转速控制策略研究
2015-05-15赵晓东
赵晓东
摘要:利用模拟盾构试验平台,研究了土压平衡盾构掘进过程中土层变化随刀盘转速变化规律。研究表明,以盾构掘进时的场切深指数(FPI)、扭矩切深指数(TPI)构成特征空间,以盾构掘进的土层类别作为预测变量,对盾构掘进过程中控制刀盘转速具有重要指导意义。
关键词:隧道工程;盾构掘进机;土质分类;刀盘转速;控制策略
中图分类号:TP18 文献标识码:A 文章编号:1009-3044(2015)08-0194-03
Abstract: Using the simulating testing of the shield tunneling machine, earth layer variation in the course of the digging is studied compared with the cutter head speed. The characteristic variable space built by the Field penetration index (FPI) and Torque penetration index (TPI) of the shield machine demonstrates that the proposed method has good recognition performance and it is significant to control the cutter speed in the course of the digging.
Key words: tunneling engineering; shield tunneling machine; earth layer classification; cutter head speed; control strategy
1 前言
盾构机是一种适用于软土层暗挖隧道的自动化机械,它具有旋转的刀盘和用于支撑的钢结构外壳。目前,盾构刀盘转速控制主要包括刀盘转速控制、转速检测、正反转控制等[1-5]。
盾构机掘进时,一般采用地质初勘法了解盾构穿越层的地质状况,由于勘测点间距较大,只能粗略了解隧道沿线的地质状况;而刀盘负载多变且时常显现为非线性模式[6-7],故操作员根据经验设定刀盘转速是滞后和粗糙的。为保证盾构完成较长距离的顺利推进,人工设定的刀盘转速一般比实际需要的转速略高一些,造成了一定的功率浪费。因此,基于经验设定的刀盘转速并非是最优的刀盘转速,有必要进行施工参数优化。
因此,本文通过模拟盾构试验平台,研究土压平衡盾构掘进过程中土层随刀盘转速变化的规律,从而建立土层与刀盘转速的变化关系模型,依据土层分布自动确定刀盘转速,实现刀盘转速的自动控制,达到刀盘转速适应土层变化,从而降低刀盘驱动功耗的目的。
2 土层的分类预处理
3 盾构行进过程中的刀盘参数及模型确立
3.1 与土层比例相联系的原始特征
盾构在隧道施工过程中的工作参数很多,其中推进力、刀盘扭矩、刀盘转速和推进速度最能反映刀盘所面对的土层状况的变化[8,9]。经多次试验分析,刀盘扭矩和推进力与土层有直接的关系。刀盘切深(贯入度Penetration,mm/r),即刀盘每转的前进距离,能直接反映推进速度与刀盘转速的关系,适于做土層分类的原始特征。基于上述变量构造新的特征变量,建立不同土质状况下刀盘转速控制的预测函数。
3.2原始特征的二次变换
为了便于统计分类,对刀盘切深做相应的二次变换,定义如下的特征参数。
扭矩切深指数TPI表示单位切深所需的刀盘表面和周向摩擦阻力矩,反映了土层对形成隧洞的抵抗能力,也具有明确的物理意义。同FPI指数相似,TPI指数的大小也表征了盾构掘进时刀盘前方土层状况,TPI越大,表明相同扭矩下产生的切深较小,刀盘前方的土层越硬;反之TPI越小,表明相同扭矩下产生的切深较大,刀盘前方的土层越软。
FPI和TPI指数分别用单位每转切深的推力和扭矩表示,是为了消除刀盘转速的影响,能够反映刀盘与土层之间的法向作用及切向作用的本质特征。由此可见,使用FPI和TPI指数作为盾构掘进土层状况识别的特征参数是比较理想的。
掘进过程中的多次实践表明,在理想状况即完整性较好的土层,FPI和TPI的相关性较好;但遇到各类土质混杂等情况时二者间的关系并不明确,例如以下几种情况:
(1)盾构遇到诸如巨型石块等障碍物或隧道开挖面突然断裂;
(2)泥浆类岩石与其他粘土经地质作用形成粉末状矿物质,受压状态下在刀盘表面或土仓内形成泥饼;
(3)盾构被诸如石块、硬土等杂物裹挟而不能正常调整其工作姿态,从而使得机械参数出现异常。
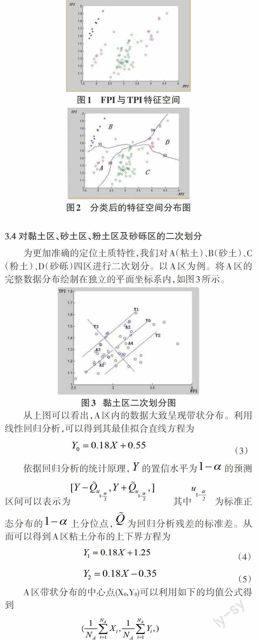
3.3 场切深指数和扭矩切深指数特征空间的建立
四个区内的土质显现出不同的参数特性,例如A区中代表粘土,具有较小的场切深指数和扭矩切深指数,说明在产生相同的贯入度时所需要的外部推力和扭矩较小,此时盾构机较容易掘进和施工;B区代表砂土,具有较小的场切深指数和较大的扭矩切深指数,说明在产生相同的贯入度时,盾构所需要的扭矩较大,而外部推力可以保持在中等的水平;C区代表粉土,具有较大的场切深指数和较小的扭矩切深指数,说明在切深指数相同时,盾构所需的外部推力较大,而扭矩保持在一个中等水平即可;D区是施工相对较困难的砂砾区,此时具有较大的场切深指数和扭矩切深指数,说明需要在产生相同需求的贯入度时,盾构所需的外部推力及扭矩都很大,施工困难,难以掘进。
4 盾构行进过程中的土层识别及刀盘控制策略
综合第2节及第3节的内容,可以得到土层识别的具体操作步骤如下:
(1)首先根据盾构在行进过程中的采样数据,分别求出其对应的贯入度(即切深指数),场切深指数FPI和扭矩切深指数TPI。
(2)根据1中求出的FPI和TPI构成的二维数据点,识别出该数据所在的土层类别(数据大致所在的类别,即A、B、C、D四种土层的一种);
(3)根据2的结果将数据点放在小区域内做二次划分;
(4)根据3的结果输出具体土质类别。
依据上述算法思想,可得如下的盾构行进土质识别流程图。
根据文中设计的土层识别算法,可以准确定位出盾构机具体的工作土质环境,然后依据施工经验,适当修正在该工作环境下的盾构物理参数,例如刀盘电流、刀盘扭矩、盾构推力、仓压等等,这样既可以保护盾构机免受损坏,又可以有效的减少电力资源的浪费。
5 结论
本文通过统计原理和模式识别相关内容,研究了盾构掘进的场切深指数和扭矩切深指数,得到了盾构所在的具体土质工作环境,然后依据土层和土质情况,适当调整物理参数。试验结果表明,本文提出的算法对盾构在掘进过程中刀盘转速、刀盘电流、盾构推力等物理参数的调整具有积极的指导意义。
参考文献:
[1] 龚力, 马旭东. 盾构掘进实验平台计算机监控系统[J]. 工业控制计算, 2005, 18(9): 3-4, 6.
[2] 胡国良. 盾构模拟试验平台电液控制系统关键技术研究[D]. 杭州:浙江大学,2006.
[3] 何於莲. 土压平衡盾构机掘进控制系统工作原理[J]. 矿山机械,2006, 34(2): 22-24.
[4] 蔡河山. 土压盾构液压传动控制系统浅析—刀盘驱动液壓传动控制系统[J]. 液压与气功, 2003, 8:30-31.
[5] 王洪新. 土压平衡盾构刀盘挤土效应及刀盘开口率对基础压力的影响[J]. 土木工程学报, 2010, 42(7):113-118.
[6] 江中孚. 日本盾构隧道新技术资料汇编[M]. 上海:上海隧道工程股份有限公司技术中心隧道网站, 2006.
[7] 魏纲,徐日庆. 顶管施工引起的土地扰动理论分析及实验研究[J]. 岩石力学与工程学报, 2004, 23(3):476-482.
[8] J.P. Marquesdesa. 模式识别—原理, 方法及应用[M]. 吴逸飞, 译. 北京:清华大学出版社, 2002.
[9] 刘明月. 秦岭隧道全断面掘进机掘进状况识别分析[D]. 成都:西南交通大学,2006.
[10] 王洪新. 土压平衡盾构掘进的数学物理模型及各参数间关系研究[J]. 土木工程学报, 2006, 39(9):86-90..
[11] 李向红. 土压平衡模型盾构掘进试验[J]. 岩土工程学报, 2006, 28(9):1101-1105.
