基于神经网的PID参数自整定控制器设计
2015-05-15付冬冬
付冬冬

摘要:本文以研究最基本的神经网络PID控制即单神经元PID控制为主,辅助研究BP神经网络。PID控制要取得好的控制效果,就必须调节好比例、积分和微分参数在控制系统中的比例,他们的数值存在着一种相互制约的关系,然而在工业实际生产过程中,完全的线性时不变系统是不存在的,一般都是非线性时变系统,并且难以建立数学模型,参数整定困难。该文通过MATLAB建立仿真,在其中建立控制对象以及控制器,即需要对比的两种神经网络PID控制,在变化被控对象为一阶、二阶系统进行分别的仿真并分析对比其控制效果;最后发现BP神经网络PID控制算鲁棒性最好。
关键词:PID控制;神经网络;单神经元PID控制;仿真
中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2015)08-0171-04
Abstract:This paper studies the basic neural network PID control that single neuron PID control-oriented , assisted on BP neural network ., and added to the control condition BP neural network PID control for comparison . PID control To achieve good control effect, it must regulate the proportional, integral and differential ratio control system parameters, and their values there is a relationship of mutual restraint, but in actual industrial production process, completely linear time invariant system does not exist, are generally nonlinear time-varying systems , and it is difficult to establish the mathematical model, parameter tuning difficult. This paper established by MATLAB simulation, in which the establishment of the control object and a controller that need to compare two types of neural network PID control , changes in the controlled object for first, second and simulation systems were analyzed and compared its control effect; and finally found that BP neural network PID control algorithm robustness of the best .
Key words: PID control; neural network; single neuron PID controll; simulation
在控制系统设计中,复杂的、变化的以及具有不确定性的被控对象是非常难控制的,但这正是控制系统面临的挑战。用精确的数学模型的控制理论和方法往往不能达到要求的控制效果。无数学模型控制能够有效的提高控制系统的自适应能力和鲁棒性,所以,无模型控制是控制系统发展的另一个重要方向。并且值不能过大或过小,如果只进行PD控制,控制作用会产生余差。其为智能控制的重要分支之一。PID控制要取得好的控制效果,就必须调节好比例、积分和微分参数在控制系统中的比例,他们的数值存在着一种相互制约的关系,在电力,化工以及机械等各行各业中都得到了广泛应用并具有良好的控制效果[1]。神经网络的最基本单位神经元具有一定程度的自我学习及适应能力,并且它的构造简单且可以轻松计算。传统的PID控制具有结构简单、调整方便和参数整定与工程指标联系紧密等特点。
1 基于单神经元的PID控制
单神经元结构PID控制的本质是,用单神经元的权系数来代替PID控制器的三个参数。
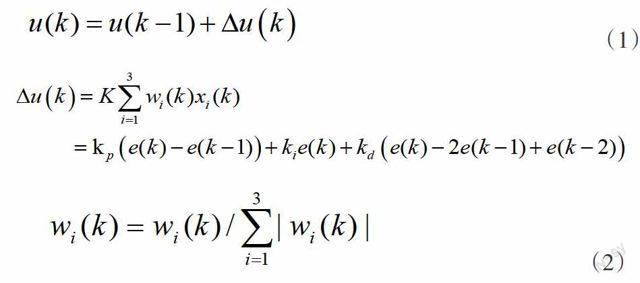
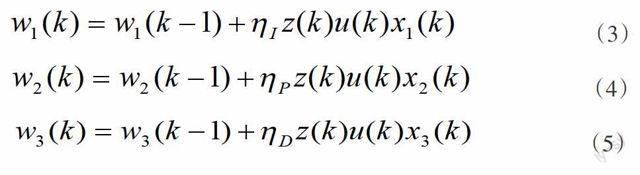
单神经元PID自适应控制,是将单神经元与PID相结合,单个神经元具有自适应和自学习能力,PID控制采用增量式PID控制算法,单神经元能完成自适应PID控制的要求。加权系数的值对控制器的输出影响比较大,如若权系数的初始值选择不当,很可能会导致系统不稳定[2]。一般来讲,主要依据经验来选择权系数的初始值,不同的被控对象应有不同的权值。Rin(k)为设定值,yout(k)所以在被控對象的输出时,首先根据响应曲线确保系统稳定,没有超调,再适当的调节学习率来加快系统的响应速度其控制及学习算法为:
K值的选择非常重要。K越大,则快速性越好,但超调量大,甚至可能使系统不稳定。若延时增加时,需减小K值,来保证系统稳定。K值选择太小,会使系统的响应速度大大的降低,不利于系统的有效控制。改进算法中权系数的调整,增加了控制量加权平方和并且让比例系数K自适应的改变在整定SNPID参数时可以根据阶跃输入的响应曲线确定,具体各个参数对控制性能的影响将在下一章用仿真实例具体说明,其步骤如下
1)比例系数K的取值对系统的快速性和稳定性影响比较大,若其太小响应速度也会过小,而若其取得太大,系统响应速度快,但调节时间长,超调量大甚至出现振荡。因此可采用非线性变换的在线修正的方法,在响应初期偏差较大的时候,取较大的K值,加快系统的响应速度[4]。
2基于BP神经网络的PID控制
PID控制要取得好的控制效果,就要综合考虑PID参数的关系。这三者不是一个简单的数学线性关系,也不是一个可以用一般的简单函数可以描述的单纯数学关系,他们之间的关系会随着控制对象的不同而发生不同的变化。而BP神经网络具有通过其自主的不断学习,最后始终可以找到一个比较适优的控制规律,其对应的P、I、D参数就是最优参数[5]。控制器由两部分组成:
1)典的PID控制器:控制对象的直接闭环控制,并且三个参数为调整模式。
分析表1可知PID参数在时刻发生变化,验证了基于神经网络的PID控制,是有自适应能力的,参数是在线整定可调的。基于BP神经网络的PID控制和基于单神经元的PID控制,在被控对象一定时其动态性能相差不大,但是当被控对象参数发生改变时,BP神经网络PID控制的系统和SNPID控制系统相比,BP神经网络PID控制系统超调量明显较小,调节速度快,使得整个系统的自适应能力和鲁棒性均有明显提高。所以,基于神经网络的PID控制更好。单神经元和Smith预估控制相结合的PID控制器其控制效果优于两种控制方法的单独控制(调节时间短),当系统参数发生改变时,该控制算法体现出来单神经元PID控制抗干扰能力强和Smith响应速度快的优点。因此在工程实际的大滞后系统(如炉温控制,一般为二阶惯性环节加延迟环节),运用Smith预估控制和单神经元PID控制相结合的算法能得到不错的控制效果。
4结论
神经网络具有很强的非线性映射能力和自适应能力,联想记忆,信息能力,并行处理和其出色的容错能力。利用MATLAB语言对非线性慢时变的被控对象进行仿真,仿真结果表明,当被控对象参数发生变化时,该控制系统仍能较好的控制被控对象达到较好的控制值效果。但是该控制方式由于要不断的进行训练,所以其收敛速度慢,响应速度不及传统的PID控制;并且网络隐含层的节点数的选择没有明确的理论指导,只能依靠实验不断的尝试确定。
参考文献:
[1] 蔡自兴.智能控制工程研究的进展[J].控制工程,2003,10(1):1-3.
[2] Antsaklis,P J.Neural Networks in Control Systems[J].IEEE Control System Magazine.
[3] 劉金琨.先进PID控制MATLAB仿真(第二版)[M].电子工业出版社,2004.
[4] 李华.计算机控制系统[M].机械工业出版社,2007.
[5] 高升.PID参数自整定[D].上海发电设备成套设计研究所,1998.
[6] 徐丽娜.神经网络控制[M].电子工业出版社,2009.
[7] 张国忠.智能控制系统及应用[M].中国电力出版社,2007.
[8] 施彦.神经网络设计方法与实例分析[M].北京邮电大学出版社,2009.
[9] 舒怀林.PID神经元网络及其控制系统[M].国防工业出版社,2006.
