北斗卫星导航系统实时定轨与钟差处理策略
2015-05-10崔红正唐歌实宋柏延刘荟萃葛茂荣
崔红正唐歌实宋柏延刘荟萃葛茂荣
(1北京航天飞行控制中心航天飞行动力学技术重点实验室,北京100094)
(2北京航空航天大学宇航学院,北京100191) (3德国地学研究中心,波茨坦14473)
北斗卫星导航系统实时定轨与钟差处理策略
崔红正1,2唐歌实1宋柏延1刘荟萃1葛茂荣3
(1北京航天飞行控制中心航天飞行动力学技术重点实验室,北京100094)
(2北京航空航天大学宇航学院,北京100191) (3德国地学研究中心,波茨坦14473)
目前鲜有对北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)实时精密定轨与钟差确定的研究,文章提出了BDS实时轨道与实时钟差处理策略,包括了观测与动力学模型、实时轨道与实时钟差处理流程与评估方法。尤其对于实时钟差,为了提高计算效率,联合使用两个独立并行的线程估计非差绝对钟差和历元间相对钟差。利用多模全球卫星导航系统试验(MGEX)与全球连续检测评估系统(iGMAS)实测数据进行了北斗实时轨道与钟差解算,BDS实时轨道径向平均精度对于GEO卫星优于20 cm,对于IGSO与MEO一般优于10 cm;钟差精度对于GEO卫星为0.5~4.5 ns,对于IGSO/MEO为0.2~2.0 ns。基于目前的轨道与钟差结果,实时精密单点定位(Precise Point Positioning,PPP)结果可以达到分米量级。
北斗卫星导航系统;实时确定;卫星钟差;精密单点定位;全球连续检测评估系统;卫星轨道
1 引言
截止到2012年底,北斗卫星导航系统(BDS,本文简称“北斗”系统)共有14颗卫星,并已经开始提供亚太区域服务,计划到2020年全球卫星星座部署完毕,开始提供全球导航定位服务。为开展全球范围全球卫星导航系统(GNSS)开放服务的监测评估,2011年,中国在ICG(International Committee on GNSS)大会上提出了建立iGMAS系统的建议[1]。经初步论证,全球连续监测评估系统包括30个全球跟踪站(国外21个、国内9个,大部分支持四大系统)、3个数据中心、8个分析中心、1个监测评估中心、1个产品综合与服务中心、1个运行控制管理中心和通信链路等。国际GNSS服务组织(IGS)也一直关注中国“北斗”系统的建设,IGS发起了MGEX(Multi GNSS Experiment)实验,并在2012年召开了以Multi-GNSS为主体的工作组,目前有近60个跟踪站具“北斗”系统数据跟踪能力,对本文的研究提供了重要的数据源。随着“北斗”系统空间段与地面段建设的日趋完善,为了改善“北斗”系统在亚太区域的定位精度、可用性、连续性以及完好性,我国也开始筹建“北斗”系统广域增强系统,其核心是生成高精度实时卫星轨道、钟差、电离层产品信息,本文正是基于此开展“北斗”系统实时卫星轨道与卫星钟差确定技术的研究。
2000年JPL研制的实时GPS卫星定轨与钟差确定软件RTG(Real Time GIPSY)[2],基于美国NASA全球GPS网络(GGN)60个左右观测站的实时数据,可以提供GPS卫星准实时与实时精密轨道与钟差产品。2002年IGS成立了实时产品工作组(RTWG),为促进GNSS实时产品的应用,开始了原型实时产品生成系统的研究。在IGS组织2002—2007战略计划中,实时产品处理被确定为GNSS高精度数据处理技术发展趋势之一。文献[3]在Bernese软件的基础上,对轨道、钟差、地球自转参数、测站坐标以及大气参数进行了准实时处理分析。文献[4]采用扩展卡尔曼滤波开发了实时卫星轨道和钟差生成的Auto-BAHN系统,实时卫星轨道钟差更新率为5 min,实时轨道精度15 cm左右,钟差精度为0.3 ns。文献[5]开发了实时精密轨道和钟差确定系统(RTOD),快速预报轨道作为实时轨道,精度为20 cm。德国地学研究中心(GFZ)开发了EPOS-(RT)软件,实时定轨精度为5 cm以下,钟差精度为0.1 ns[6]。国内方面,导航卫星定轨技术研究开始于20世纪80年代,伴随GPS进入中国,许多学者开始对导航卫星精密定轨展开研究。虽然近年来GNSS数据分析工作在国内取得了长足的进度,如武汉大学基于实时轨道与钟差产品[7-8],开展了中国及周边区域的广域实时精密定位原型系统的研究与建设,但实时GNSS数据处理工作尚处于起步阶段,尤其对于具有自主知识产权的“北斗”系统。
本文给出了实时轨道与钟差确定策略,利用iGMAS、MGEX实时数据流,对全球实时“北斗”系统卫星轨道与钟差处理结果进行了分析,并给出了实时精密单点定位(Precise Point Positioning, PPP)结果。
2 实时轨道与钟差确定策略
导航卫星经过长期的模型精化,轨道动力学模型已经非常成熟,短期轨道预报达到很高的精度,本文实时轨道每次处理继承之前70 h的观测弧段,结合2 h的最新观测弧段,合并成72 h观测弧段(3天弧段)利用最小二乘估计器进行轨道确定,并预报2 h弧段作为实时轨道产品。
实时“北斗”系统卫星钟差处理流程如图1所示,为了提高计算效率,尤其是在实时应用中,精密钟差实时估计采用固定卫星轨道和站坐标参数,仅估计卫星钟差、接收机钟差、对流层和模糊度参数的方式。为了进一步提高计算效率采用非差模型估计与历元差分模型估计两个线程相结合的模式,对于非差模式,采用无电离层的非差相位相位(LC)和伪距组合(PC)观测值,同时估计的参数有卫星钟差、接收机钟差、实数无电离层组合模糊度参数、对流层参数:

对于非差模式的处理模式,大量待估参数影响了实时钟差的处理速度,此处采用参数消除方法来降低法方程中参数的维数[9],由于钟差逐历元变化,在进入法方程之前将其预先消除,待模糊度参数、对流层参数求解完成后,然后恢复出消除的钟差参数。为了进一步提高处理效率,采用如下历元差分估计模式:

此处消去了模糊度参数,进而有效提高处理效率。联合使用两个独立并行的线程估计非差和历元相对钟差,非差线程估计5 s采样率钟差,而在历元差分线程中1 s估计一组相对卫星钟差,即得到高效率生成高采样率实时钟差产品。
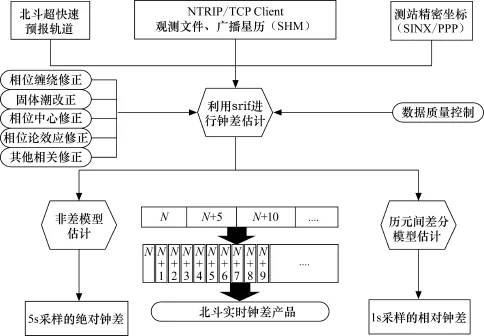
图1 “北斗”系统卫星实时钟差处理流程Fig.1 Diagram of BDS satellite real time clock determination
固定利用后处理PPP解算或从SINEX(Solution INdependent EXchange Format)文件中读取的测站坐标,并固定预报实时轨道,利用“北斗”系统广播星历作为待估钟差的初值,采用均方根信息滤波器(SRIF)估计器[10]对实时数据流进行处理,得出“北斗”系统实时钟差产品,具体估计策略如表1所示。由于网络延迟与数据处理延迟,实时钟差产品有几秒至几十秒的延迟,需要对其进行超短期预报。此处,由于钟差估计时间基准的不稳定性,对历元间钟差差分序列进行二次多项式拟合,求出历元间差分预报值,之后再还原成预报钟差。
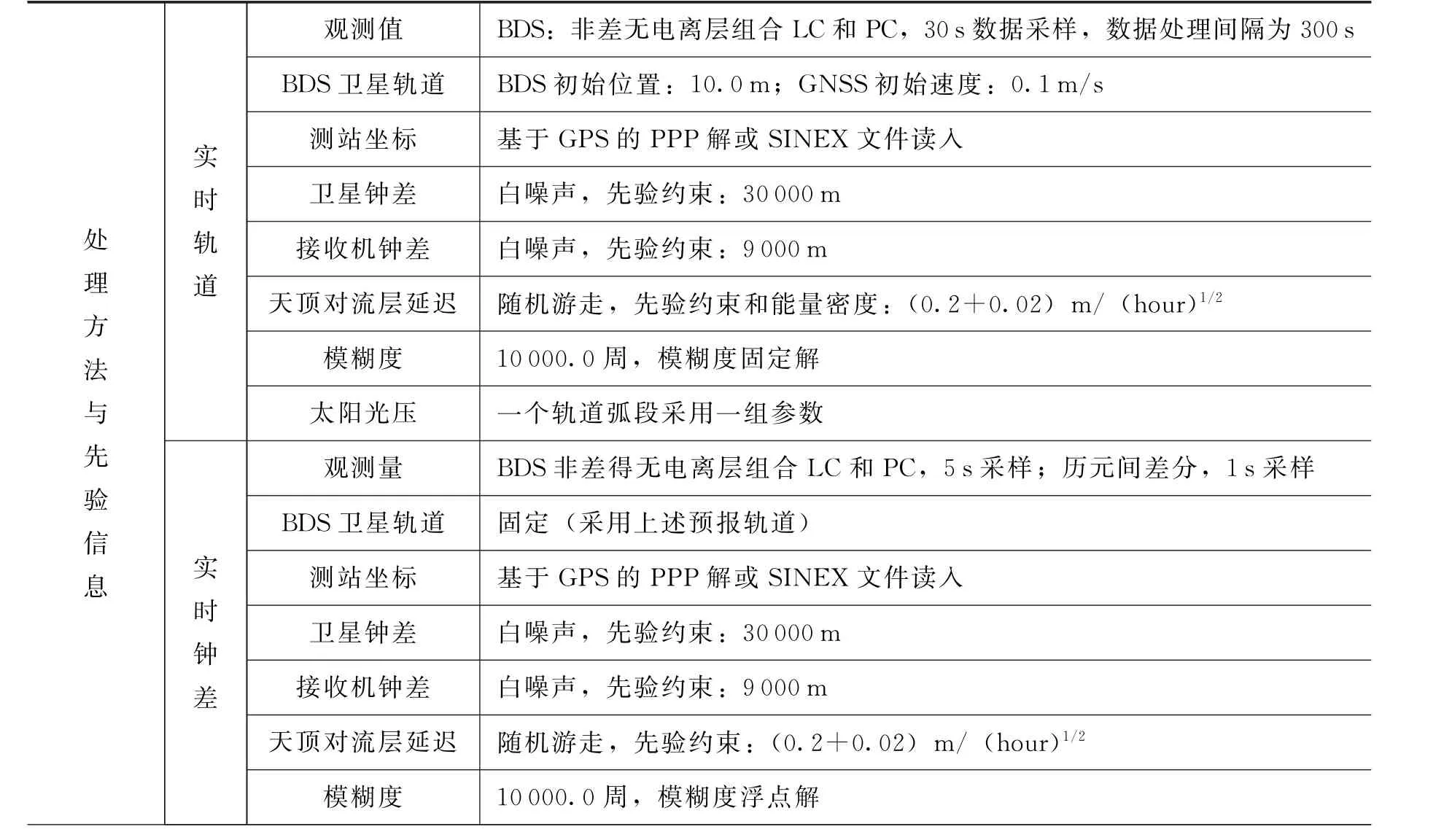
表1 实时 “北斗”系统卫星轨道与卫星钟差估计策略Tab.1 Processing strategies for BDS real time orbit determination and clock determination

续表1
对于实时轨道与钟差,利用GFZ解算的“北斗”系统最终轨道与钟差产品进行外符合精度对比,并利用仿真实时PPP结果验证“北斗”系统实时轨道与钟差的解算效果。用1D RMS来评价定轨结果,1D RMS=((RM+RM+RM)/3)1/2,其中,RMSR为径向RMS,RMSC为法向RMS, RMSA为迹向RMS。
3 算例测试与结果评估
算例测试结果如图2~图7所示。“北斗”系统实时轨道处理采用MGEX与iGMAS一共55个站的“北斗”系统观测数据,如图2所示,计算时间为“北斗”系统时间(BDT):2015年第060天到066天。2 h预报轨道与GFZ的最终“北斗”系统轨道产品[12]对比。轨道精度对于GEO卫星(C01C02C04C05)为100~400 cm(1D RMS),对于IGSO(C06C07C08C09C10)为80 cm(1D RMS)以下,MEO(C11C12C14)为30 cm(1D RMS)以下,如图4所示。对于定位精度,主要考察轨道径向精度,BDS实时轨道径向平均精度如图5所示,GEO卫星为20 cm以下,对于IGSO与MEO为10 cm以下。
“北斗”系统实时钟差处理采用如图1所示的策略,MGEX与iGMAS一共19个站具有“北斗”系统实时流观测数据,如图3所示,计算时间为“北斗”系统时间:2015年第060天到066天,实时“北斗”系统钟差与GFZ的最终“北斗”系统钟差产品[12]对比。钟差精度对于GEO卫星为0.5~4.5 ns,对于IGSO与MEO为0.2~2.0 ns以下,如图6所示。
实时PPP结果用来验证“北斗”系统实时轨道与钟差的解算效果,利用北京航天飞行控制中心自己维护的多模GNSS跟踪站BJSH站的实时数据,进行仿真实时PPP解算。计算时间为“北斗”系统时间:2015年第060天到066天,利用GPS静态PPP结果作为测站参考坐标,每天重新启动,24 h后的定位结果如图7所示:水平东方向(East)低于5 cm,水平北方向(North)低于10 cm,垂直向上方向(Up)低于10 cm,但由于063天“北斗”系统钟差缺少部分卫星,导致定位精度稍微偏差。

图2 用于BDS实时轨道解算的跟踪站分布Fig.2 Ground tracking stations distribution for real time orbit determination
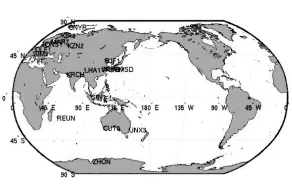
图3 用于BDS实时钟差解算的跟踪站分布Fig.3 Ground tracking stations distribution for real time clock determination
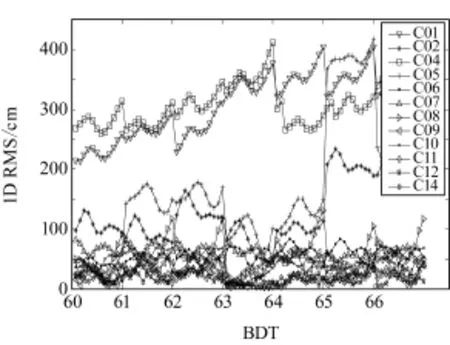
图4 BDS实时轨道与GFZ的最终北斗轨道产品对比(1D RMS)Fig.4 1D RMS of BDS real time orbit compared with GFZ final orbit

图5 BDS实时轨道径向平均精度统计Fig.5 Mean radial RMS of BDS real time orbit compared with GFZ final orbit
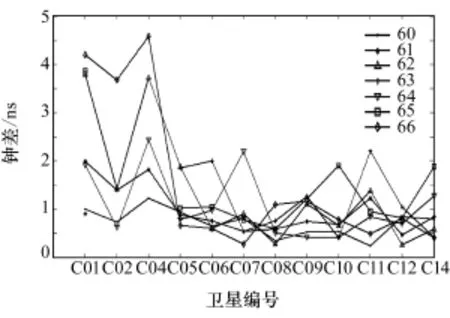
图6 BDS实时钟差精度统计Fig.6 STD of BDS real time clock compared with GFZ final clock

图7 基于BDS实时轨道与实时钟差的实时PPP精度Fig.7 Real time PPP accuracy for BJSH station
4 结束语
本文针对“北斗”系统广域增强系统建设的需要,提出了“北斗”系统实时轨道与实时钟差处理流程,尤其对于实时钟差,为了提高计算效率联合使用两个独立并行的线程估计非差绝对钟差和历元相对钟差。利用MGEX与iGMAS实测数据进行了“北斗”系统实时轨道与钟差解算,BDS实时轨道径向平均精度:GEO卫星为20 cm以下,对于IGSO与MEO为10 cm以下;钟差精度对于GEO卫星为0.5~4.5 ns,对于IGSO与MEO为0.2~2.0ns以下。基于目前的轨道与钟差结果,实时PPP结果可以达到分米量级。结果表明本文提出的处理流程与策略可很好完成“北斗”系统广域增强系统对核心实时轨道与钟差的需求,可以用于北斗二代重大专项中国广域增强系统关键技术攻关与演示验证。后续,随着“北斗”系统空间段与地面段加速建设,实时轨道与钟差精度能够进一步提高。为了满足不同导航系统的互操作,需要进一步对多系统的实时产品联合解算效果进行分析。
致谢 作者感谢国际GNSS监测评估系统(iGMAS)提供的观测数据(www.igmas.org)。
[1] YANG.Working progress of iGMAS[C].IGS Workshop,Olsztyn,Poland,2012.
[2] SHARP T,HATCH R,NELSON F.Star Fire and real-time GIPSY:A high accuracy Global Differential GPS System[C].Proceedings of the 5th International Symposium on Satellite Navigation Technology& Application,Canberra,Australia,July 24-27,2001.
[3] DACH R,HUGENTOBLER U,FRIDEZ P,et al.Bernese GPS software version 5.0 user manual[R]. Bern:University of Bern,2007.
[4] ZHANG Q,MOORE P,HANLEY J,et al.Auto-BAHN:Software for near real-time GPS orbit and clock computations[J].Advanced in Space Research,2007,39(10):1531-1538.
[5] SCOTT L.Real time precise orbit&clock determination[R].UK:Thales Research and Technology Limited,2005.
[6] GE M,CHEN J,GENDT G.EPOS-RT:Software for real-time GNSS data processing[C].EGU General Assembly,Vienna,Austria,2009.
[7] 施闯,楼益栋,宋伟伟,等.广域实时精密定位原型系统及初步结果[J].武汉大学学报 (信息科学版), 2009,30(11):1271-1274.
SHI CHUANG,LOU YIDONG,SONG WEIWEI,et al.A wide area real-time differential GPS prototype system and the initial results[J].Geomatics and Information Science of Wuhan University,2009,30(11): 1271-1274.
[8] 楼益栋,施闯,周小青,等.GPS精密卫星钟差估计与分析[J].武汉大学学报(信息科学版),2009,34(1): 88-91.
LOU YIDONG,SHI CHUANG,ZHOU XIAOQING,et al.Realization and analysis of GPS precise clock products[J].Geomatics and Information Science of Wuhan University,2009,34(1):88-91.
[9] 葛茂荣.GPS卫星精密定轨理论及软件研究[D].武汉:武汉测绘科技大学,1995.
GE MAORONG.Research on GPS precise orbit determination theory and software[D].Wuhan:Wuhan Technological University of Survey and Mapping,1995.
[10] BIERMAN G J.Factorization methods for discrete sequential estimation[M].New York:Academic Press,1997.
[11] RALF S,PETER S,GERD G,et al.Generation of a consistent absolute phase-center correction model for GPS receiver and satellite antennas[J].Journal of Geodesy,2007,81(12):781-798.
[12] DENG ZHIGUO.Precise orbit determination of BeiDou satellites at GFZ[C].IGS Workshop,Pasadena, USA,2014.
作者简介
崔红正 1983年生,2012年获北京航空航天大学飞行器设计专业博士学位,现为北京航天飞行控制中心博士后。研究方向为GNSS高精度数据处理、卫星星座的优化设计、航天器精密轨道确定、航天器姿态轨道动力学与控制、航天任务分析与设计。
BDS Satellite Real Time Orbit and Clock Determination and Initial Results Analysis
CUI Hongzheng1,2TANG Geshi1SONG Baiyan1LIU Huicui1GE Maorong3
(1 Flight Dynamics Laboratory,Beijing Aerospace Control Center,Beijing 100094)
(2 School of Astronautics,Beijing University of Aeronautics and Astronautics,Beijing 100191)
(3 German Research Center for Geosciences,Potsdam 14473)
Navigation satellite real time orbit determination and clock determination are research highlights in navigation areas.The processing strategies and processes for Beidou Navigation Satellite System(BDS)real time orbit determination and clock determination were provided,especially for the clock processing with zero-differenced absolute clock and epoch-differenced relative clock.Using the data from the Multi-GNSS Experiment(MGEX)and international GNSS monitoring&Assessment Service(iGMAS)tracking networks,the average orbit accuracy for real time BDS in radial direction is better than 20 cm,and 10 cm for GEO,IGSO and MEO,respectively.And the clock accuracy for real time BDS can reach 0.5~4.5 ns,and 0.2~2.0 ns for GEO,IGSO and MEO,respectively. Based on the this result,the real time precise pointing position(PPP)performance following BDS can achieve decimeter level.
BDS;Real time determination;Satellite clock;Precise point positioning; iGMAS;Satellite orbit
10.3780/j.issn.1000-758X.2015.05.001
(编辑:车晓玲)
中国博士后科学基金第52批面上(2012M521883),全球连续监测评估系统分析中心建设与运行维护(GFZX0301040308-05)资助项目
2015-01-07。收修改稿日期:2015-05-20
