基于PLS的拾放机械手位姿分析
2015-05-08余发山尹文宽刘根锋
余发山 尹文宽 刘根锋
(河南理工大学电气工程与自动化学院,河南 焦作 454000)
基于PLS的拾放机械手位姿分析
余发山 尹文宽 刘根锋
(河南理工大学电气工程与自动化学院,河南 焦作 454000)
为提高拾放机械手位姿的精确度,对采集到的末端执行器位移信号进行了研究。主要采用多分辨率小波变换法提取机械手运动时产生的位移信号的小波系数标准偏差作为特征矢量,将特征矢量输入PLS进行特征提取和动作模式分类,最终实现了对拾放机械手位移信号的四种不同动作模式的分类。试验结果表明,采用多分辨率小波变换法进行特征提取的PLS分类方法,具有更高的识别率,运算速度更快,对于拾放机械手的位姿分析具有一定的借鉴意义。
拾放机械手 位姿分析 偏最小二乘法(PLS) 小波变换 模式识别 特征提取
0 引言
机械手也可称为操作机,具有和人臂相似的功能,可在空间抓放物体或进行其他操作的机械装置。拾放料机械手按其结构可称之为并联结构机械手,并联机械手由于具有刚度大、定位精度高、承载能力强、自重负荷比小、易实现高速及无积累误差等特点,得到了极大的发展[1],在工业上主要进行自动识别、搬运、整列、分拣、组装等操作[2]。
由于在拾放机械手进行位姿分析时采集到的位移信号存在干扰,文献[3]在虚拟样机的基础上,通过采用D-H法建立专用机器人的位姿方程进行位姿分析。文献[4]通过采用小波包变换在位姿分析前对位移信号进行去噪,有效消除了采集位移信号的干扰,提高了运动学的求解精度。文献[5]通过设计基于反馈增益的反步法控制器消除机器人动态误差模型中的部分非线性项,采用神经网络对模型不确定性进行补偿,并利用自适应鲁棒控制器在线补偿神经网络的误差,实现了移动机器人对任意位姿的精确分析。
本文采用多分辨率小波变换法提取机械手运动时产生的位移信号,将小波系数标准偏差作为特征矢量来计算,将特征矢量输入偏最小二乘法(partial least square,PLS)进行特征提取和动作模式分类,PLS是一种能够将线性相关的数据从高维空间投影到低维特征空间,并最终建立特征向量间的线性回归关系的方法。目前模式识别大部分做法都是将特征提取和分类器分别进行设计,这会导致特征提取和分类器设计不能有机地结合起来,分类器的识别率和运行速度不理想。因此,寻求两方面的有机结合,进一步提高识别性能,是一个日益关注的课题。
1 位移信号的小波分析
小波变换是一种新兴的数学分支,通过伸缩和平移小波形成的小波基来分解(变换)或重构(反变换)时变信号的过程。在模式识别领域内,它是特征提取的一种经典方法。小波变换在时频域内具有双重定域和多分辨率分析的能力,因此能够广泛应用在信号处理、生物医学和物理学等众多领域[6]。
小波变换是基于傅里叶变换提出的一种“自适应变化”的时频窗结构理论。它是一种时间—频率域上的分析方法,通过有效特征向量,能够减少计算量[7]。本文首先通过位移传感器收集机械手在拾放过程中的位移信号,然后采用多分辨率小波分析变换法提取位移信号的小波系数的标准差,作为特征向量。
设ψ(t)是绝对可积且平方可积函数。

(1)
(2)
式(2)为小波的允许条件,其中ψ(ω)是ψ(t)的傅里叶变换。若ψ(t)满足式(1)和式(2),称ψ(t)为母小波,对母小波进行伸缩和平移后的函数为:

(3)
通常,ψa,τ(t)称为小波基函数,其中a称为伸缩因子,τ称为平移因子。把有限信号f(t)和ψa,τ(t)做内积,即:
(4)
要使式(3)和式(4)逆变换存在,ψ(t)必须满足条件:

(5)


(6)

(7)

(8)
式(6)表明,小波函数必然具有振荡性。


(9)
随着小波变换的发展,正交小波变换的快速算法的实现,产生了多分辨率(multi-resolution analysis,MRA)小波变换法。MRA是指对需要分析的信号f(t)进行多尺度的分解,并在各个尺度下处理分析,它用一系列的近似函数去逼近信号f(t)。不同尺度的小波函数构成的函数空间的基是不相同的,这体现了不同的频率特性[7]。如果将信号f(t)不断地向函数空间投影,就可以得到信号在其任何一个子空间中的分量值,从而实现了对小尺度对应的高频分量和大尺度对应的低频分量的分析。一般来说,低频分量对应信号中的近似分量,高频分量对应细节分量。这些近似分量和细节分量能充分表达信号的局部性能。因此,小波系数包含信号的重要信息可以作为分类器的特征向量。
离散序列x(n)的多分辨率分析可用Mallat算法求得:

(10)

(11)
式中:h0为一个低通滤波器,h1为一个高通滤波器;xj(n)为原始信号;f(t)的逐渐平滑,即反映了原始信号的近似(概貌)信息;dj(n)为x(j-1)(n)和x(j)(n)之间的差异,反映了信号的细节部分。
本文采用“db5”对机械手动作信号进行3层分解,结合式(8)和式(9)计算分解后的所有的近似分量和细节分量的标准偏差,作为特征向量。3层分解示意如图1所示。
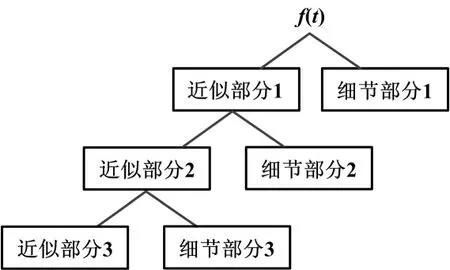
图1 3层分解示意图
图1中,f(t)代表机械手动作信号,按照图1结构对下移动作信号做3层分解,如图2所示。
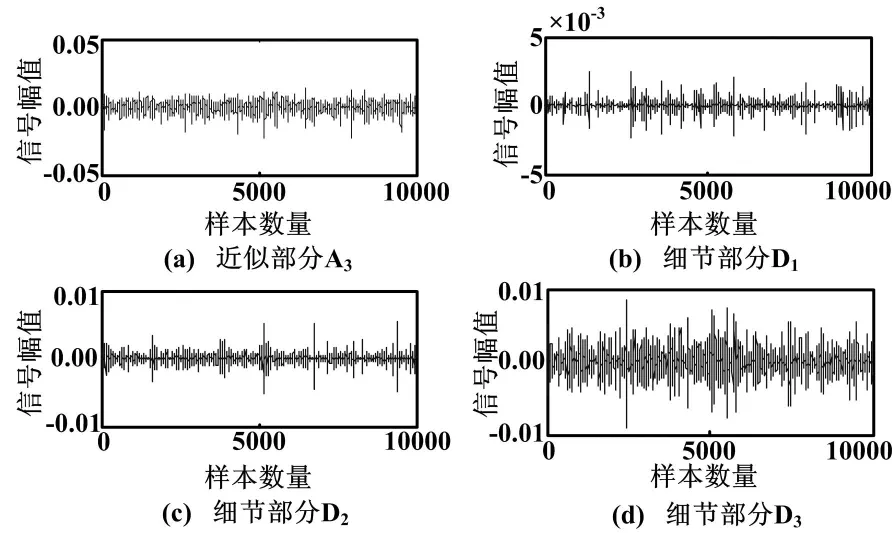
图2 下移动作信号3层分解图
2 位移信号PLS算法
分类器也称作分类模型或者目标函数,其本质是设定一个目标函数f(x),将处理后样本数据集的属性x映射到已经设定好的类别标签y上[8]。在模式分类中,分类器起到决策机制的作用,分类器设计的好坏直接影响模式识别的分类性能。常用分类器主要有bayes分类器、fisher分类器、BP神经网络等。
偏最小二乘法(PLS)最早由Herman Wold于20世纪60年代提出,后来,Wold S和Haetens将其应用于化工过程[9]。PLS是最小二乘法的一个新发展,它不仅可以有效地克服普通最小二乘回归方法的共线性问题,而且它在选取特征向量时强调自变量对因变量的解释和预测作用,去除了对回归无益噪声的影响,完成了特征提取的过程,使模型具有更好的鲁棒性和预测稳定性[10-11]。鉴于偏最小二乘法对自变量和因变量的解释和预测作用,在一些文献中又被称为特征结构投影法[12-13]。
2.1 对于两类动作分类问题
如果有m个自变量x1,x2,...,xm,n个因变量y1,y2,...,yn,用矩阵形式表示是X=[x1,x2,...,xm]T和Y=[y1,y2,...,yn]T。在本文中将Y矩阵称为类别变量。它是一个n×1的列向量,元素只有0或1。假设一个样本属于第i类,则有yi=1,其他yj=0(j≠i)。PLS利用训练样本X和Y建立回归模型,当输入测试样本时,利用已经建立的模型对变量Y进行分类预测[14]。PLS在进行回归模型建立时,同时对自变量矩阵X和类别矩阵Y进行主成分提取,并尽可能使两者的主成分在线性相关性上达到最大[15-16]。模型建立过程如下。
① 计算X相对于X的主成分向量t的负荷向量:
pT=tTX/(tTt)
(12)
式中:t和后式中的u的计算具体计算参考。
② 计算Y相对于Y的主成分向量u的负荷向量:
qT=uTY/(uTu)
(13)
③ 计算u对t的回归系数
β=uTt/(tTt)=tTu/(tTt)
(14)
④ 计算X的残差矩阵
E=X-tpT
(15)
⑤ 计算Y的残差矩阵
F=Y-βtqT=Y-tbT
(16)
其中:

(17)
⑥ 令X=E、Y=F,重复步骤①~⑤,计算下一个主成分向量,直至X的秩为0,全部成分计算完毕。通常迭代次数k一般不超过10次。
⑦ 预测时根据p求出待测样本的主成分向量t′,然后根据下式求出预测值:
y′=t′bq
(18)
类别判定规则为:y′=1,待测样本为第1类;y′=0,待测样本为第2类。
2.2 对于多类动作判别问题
PLS对于分多类问题,是建立在分两类问题的基础上的,即所谓的一对多法构造PLS多值分类器。具体方案是:文中下移、上移、左移和右移共4类,利用3个PLS子分类器实现四分类。第一个分类器将第一类和其他三类分开,第二个分类器将第二类和第三、第四类分开,第三个分类器将第三类和第四类分开,最后将3个分类器相互连接就构成了四类分类器。四分类示意图如图3所示。

图3 四分类示意图
3 PLS算法结果分析
本文是以郑州润华工业自动化有限公司生产的拾放料机械手作为研究对象,通过使用位移传感器从机械手拾放操作过程中得到所需数据。
机械手共有下移、上移、左移、右移4种动作模式,分别用1、2、3、4表示。每种动作采集1 000个数据。对各个动作模式动作进行3层小波分解后取系数的标准偏差作为特征项。每个模式共8个特征项,将PLS算法中进行主元分析时累积贡献率设置为92%。训练样本数目取280个,测试样本取120个。为了能比较PLS的识别率能力强弱,在样本和其他条件相同的情况下,将PLS算法与贝叶斯、BP神经网络、RBF神经网络和fisher算法进行对比。
PLS分类结果如图4所示,每个样本的纵坐标就是它的类别归属。
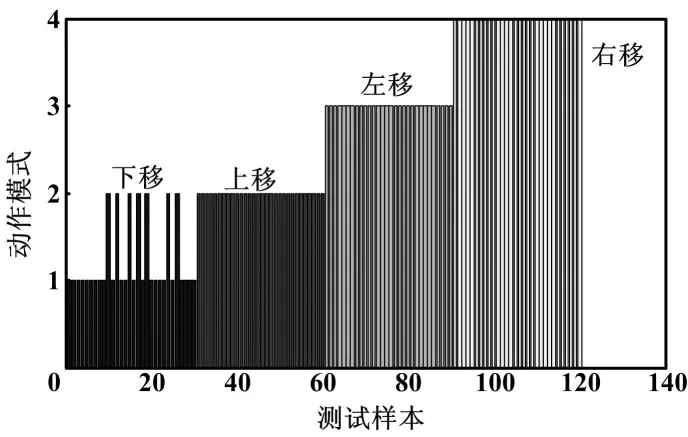
图4 PLS分类图
从图4可以直观地看出只有下移动作分类有错误的情况,正确识别率(120-7)/120=94.2%。下面是有无主成分分析(principal component analysis,PCA)降维的比较,PLS算法与贝叶斯、BP神经网络、RBF神经网络和fisher算法对比分析如表1所示。

表1 各个算法对比分析
从表1可以看出,PLS识别率高于贝叶斯、BP神经网络和fisher等分类器。为了便于比较,将数据进行PCA降维,取累积贡献率为92%,数据从8维降维3维,然后分别用贝叶斯、BP神经网络、RBF神经网络和fisher算法进行模式识别。表2是降维后的算法对比。表2中,1代表PCA+Bayes算法;2代表PCA+BP算法;3代表PCA+RBF;4代表PCA+Fisher算法;5代表PLS算法。

表2 结合PCA各个算法识别率
从表2可以看出,经过PCA降维处理后,Bayes、BP神经网络和fisher等算法识别比不降维有所提高,但总体还是低于PLS算法的识别率。在测试中我们发现PLS比BP(RBF)神经网络鲁棒性好,运算速度快,fisher运算速度有点慢,如果样本可区分度不大,fisher算法需要几分钟左右。正因为PLS算法具有较好的鲁棒性、运算速度快,其才被广泛地用于过程建模和过程控制方面。
4 结束语
偏最小二乘法(PLS)是主元分析(PCA)、主元回归(PCR)、典型相关分析(CA)等多种数据处理方法有机结合的综合应用,它可以预测分析和数据处理分析,实现了特征提取和分类器设计的有机结合,可以达到较好的识别能力。PLS是一种多线性回归软测量建模统计分析方法。它将多元回归问题转化为若干个一元问题,适用于样本数目少而变量之间存在多重相关性且变量数目多的建模情况,这是传统经典算法没有的优点。因此,本文提出的PLS算法对拾放机械手位姿分析有一定的借鉴意义。
[1] 赵永杰.高速轻型并联机械手动态设计理论方法[D].天津:天津大学,2006.
[2] Miler K.Maximization of workspace volume of 3-DOF spatial parallet[J].ASME Journal of Mechanical Design,2002,124(2):347-350.[3] 杨萍,宁鹏,张淑珍,等.水轮机修复专用机器人的位姿分析[J].机械设计,2004,10(10):11-13.
[4] 游辉胜,方康玲,薛孝琴.基于matlab小波包的工业机器人位姿分析[J].机器人技术,2008,24(2):215-216.
[5] 贾鹤鸣,宋文龙,陈子印,等.基于神经网络反步法的移动机器人路径跟踪控制[J].南京理工大学学报,2014,2(1):27-33.
[6] 麻书钦,范海峰.基于小波变换和时间序列的网络流量预测模型[J].河南理工大学学报:自然科学版,2013,32(2):189-192.
[7] 荆双喜,简彦成,冷军发.矿用通风机滚动轴承振动故障诊断研究[J].河南理工大学学报:自然科学版,2012,31(6):698-701.
[8] 秦锋,杨波,程泽凯.分类器性能评价标准研究[J].计算机技术与发展,2006,16(10):86-88.
[9] 廖春华,杜建强,程春雷,等.改进的偏最小二乘法回归推荐算法[J],江西师范大学学报:自然科学版,2012,36(6):627-630.
[10]Nouna K, Anders B, Svante W.PCA and PLS with very large data sets[J].Computational Statistics & Data Analysis, 2005 (48) :69-85.
[11]Svante W, Michael S,Lennart E. PLS-regression: a basic tool of chemometrics[J].Chemometrics and Intelligent Laboratory Systems,2001(58) :109-130.
[12]王桂增,叶昊.主元分析与偏最小二乘法[M].北京:清华大学出版社,2012:41-45.
[13]宁禄乔.PLS算法研究[D].天津:天津大学,2006.
[14]董学锋,戴连奎,黄承伟,等.结合PLS-DA与SVM的近红外谱软测量方法[J].浙江大学学报:工学版,2012,46(5):825-829.
[15]楼安平,杨新.基于偏最小二乘法与支持向量金的人脸识别[J].计算机仿真,2005,22(12):166-168.
[16]Wold H. Nonlinear estimation by iterative least squares procedures[C]. Research Papers in Statistics,New York:Wiley, 1996.
Position and Attitude Analysis Based on PLS for Pick & Place Manipulator
To improve the accuracy of the posture of manipulator, the displacement signals collected from end effector are researched. The standard deviation of wavelet coefficients of the displacement signal generated by manipulator movement is extracted by adopting multi-resolution wavelet transform, and then used as characteristic vector for calculation. The characteristic vector is input partial least square (PLS), for feature extraction and motion pattern classification, finally, classification for four of the motion patterns of displacement signals of pick & place manipulator is implemented. The test results show that the PLS classification method using multiresolution wavelet transform for feature extraction possesses higher recognition rate, faster operation speed, this provide reference significance for position and attitude analysis for pick & place manipulators.
Pick & place manipulator Analysis of position and attitude Partial least square Wavelet transform Pattern recognition Feature extraction
余发山(1952-),男,1977年毕业于焦作矿业学院电气工程专业,获学士学位,教授;主要从事自动化与工业过程控制等方面的教学及科研工作。
TP241+.2;TH-3
A
10.16086/j.cnki.issn1000-0380.201510003
修改稿收到日期:2015-03-11。
