辅助支承汽轮机转子静态特性分析
2015-05-07雒兴刚初世明
雒兴刚, 初世明
(哈尔滨汽轮机厂有限责任公司,哈尔滨 150046)
0 引言
目前大型汽轮机组转子中的低压转子由于重量大、跨距长、叶片级数多、旋转半径大且自带联轴器后使外伸悬臂加大,这种特殊结构给动平衡带来很大的困难[1]。增加辅助第三支承是目前国内外兴起的一种新的平衡方法,所以研究两支承状态下汽轮机转子的静态特性和增加辅助第三支承后汽轮机转子的静态特性,具有非常大的意义[2]。
1 两支承方式长悬臂转子力学模型的建立
本文以国产600 MW低压转子作为研究对象,应用45°法将转子分为多轴段积木块进行模化,通过转子动力学分析软件研究转子支承的力学特性,进而对比分析装配两轴承状态下和增加辅助第三支承后汽轮机转子的力学特性。
首先建立两轴承转子力学模型,转子两轴承系统为2个可倾瓦轴承,装配2轴承情况下,建模见图1。

图1 装配2轴承低压转子力学模型
从图1中可见,低压转子悬臂端较长,而且质量较大,另外该转子跨距较大,转子两支承必然在外伸端造成较大的回转半径,因此会给不平衡响应以及转子稳定性带来很大影响,因此需要对该转子的静态、动态特性进行计算和详细分析。
1.1 两支承状态下汽轮机转子静态分析
600 MW低压转子在两轴承情况下的各项参数,包括跨距、重量、挠度、力矩等,见表1所示。

表1 两轴承情况转子重力挠度
从表1可以看出两轴承状态下跨距非常长,而且挠度很大。这样形成的力矩也很大,会给整个转子动态特性带来很大影响。
应用转子动力学分析软件,来计算装配两轴承情况下转子的动力挠度,如图2所示,为转子重力挠度曲线。
从图2可以看出,该转子在两支承处静态挠度曲线呈正弦波,曲线在外伸端呈现非常陡峭的上升趋势,即使在静止状态,悬臂端也拥有较大的静态位移量,因此可以预见两支承状态下在外伸端将存在较大的不平衡响应。
1.2 两支承状态下长悬臂转子的轴承载荷情况
600 MW汽轮机转子在两支承情况下的静载荷参数如表2所示。
从表2可以看出,两支承状态下轴承支反力明显不均,悬臂端支反力远大于另一端轴承支反力,这样的转子高速旋转时必然会产生较大的激振力。
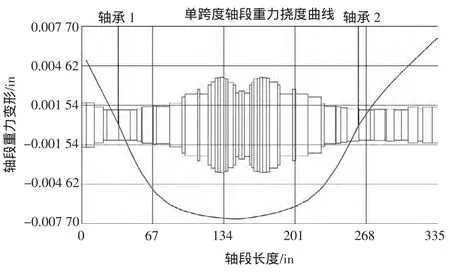
图2 装配两轴承时转子重力挠度分布
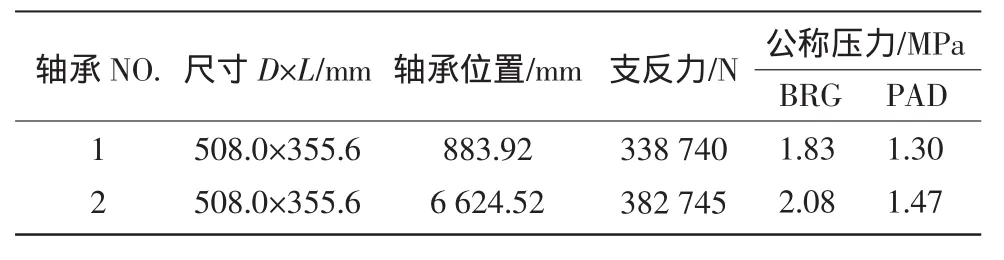
表2 两支承情况轴承静载荷
2 建立增加辅助支承后长悬臂转子的力学模型
根据相同汽轮机转子的各轴段数据,用转子动力学分析软件建立力学模型如图3所示。

图3 增加辅助支承后低压转子力学模型
从图3中可以得出,转子原两支承位置不变,增加辅助支承后转子悬臂端缩短,其回转半径变小,载荷分配也更加合理。
2.1 增加辅助支承后的长悬臂转子静态挠度分布
增加辅助支承后,转子在重力作用下的静挠度见图4。
从图4可以得出,增加辅助支承后转子在轴跨间重力挠度没有发生显著变化,但在悬臂端挠度曲线变得非常平坦,这说明增加辅助支承后,悬臂端对整个转子的振型影响变得很小,不平衡贡献度也会相应地变小,因此这种支承方式会使转子更加稳定。
增加辅助支承后转子重力挠度见表3。
和两支承情况下对比分析转子重力挠度发现,当增加1个轴承之后,由于改变了转子电端悬臂轴的边界条件,轴承支反力重新分配,因此转子挠度增大。

图4 增加辅助支承后转子静态挠度分布

表3 增加辅助支承后转子重力挠度
2.2 增加辅助支承后长悬臂转子的轴承载荷情况
建立力学模型后,增加辅助支承后,经计算,各轴承的载荷情况发生改变,如表4所示。
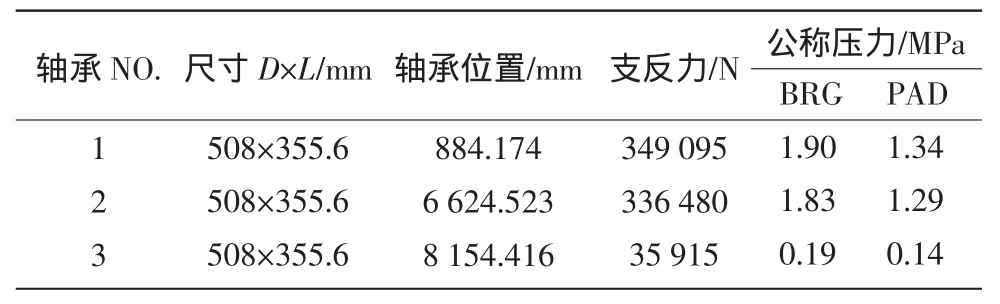
表4 增加辅助支承后轴承静载荷
对比两种情况下各轴承所受的支反力可以看出,在转子端部再安装1个轴承可以使1#轴承支反力增大3.06%,而2#轴承支反力减小12.09%。从各轴承的公称压力也可看出,增加辅助支承后可以改变其他轴承的载荷条件,使前2个轴承受载更均匀。
3 结论
1)单跨转子,增加1个辅助支承后,由于改变了转子电端悬臂轴的边界条件,轴承支反力重新分配,因此转子挠度增大。
2)增加辅助支承可以改变其他轴承的载荷条件,使前2个轴承受载更均匀。
[1] 邓旺群,唐广,高德平.转子动力特性及动平衡研究综述[J].燃气涡轮试验与研究,2008(2):57-62.
[2] 饶金阳.汽轮机低压转子高速动平衡时支承方式的研究[J].科技信息,2010(1):1019-1021.
