折叠翼飞行机器人(D-UAV)控制系统研究
2015-05-07樊永超陆永华王代武
樊永超, 陆永华, 王代武
(南京航空航天大学 机电学院,南京 210016)
0 引 言
目前世界上的防空平台主要是地面防空系统和舰载防空系统,空中的防御手段除了有限的机载防空导弹之外,再无其它。以色列装备的“哈比”无人机作为一种多用途无人机,它可以通过攻击敌方雷达辐射源以达到压制、攻击、摧毁敌方防空系统和打击对方组织的地面防御系统。法国达索公司正致力于“鹄”系列技术验证机的研制,目的是研发出一系列无人机,主要可分为陆军的战术无人机、用于高空长航时侦察的无人侦察机和无人战斗机[1]。在2006年珠海航空展上中国无人机“翔龙”亮相,该机与美国RQ-4“全球鹰”类似,主要用于执行高空长航时侦察任务。本文设计的低空巡航自毁式无人机目前还无人研究[2]。
在近地空间布置一种折叠翼飞行机器人D-UAV(Deformable-Unmanned Aerial Vehicle)防御方阵,上下左右,每隔数百米就布置一个D-UAV单元,由这些单元节点组成,整体可移动,个体可悬停,垂直攻击式的防御方阵体系。悬停状态下,D-UAV悬停在空中等待指令信号,一旦发现目标由预警雷达发出控制信号,D-UAV立即收起旋翼,启动尾部的固体火箭发动机,D-UAV就像导弹一样去攻击目标,属于一种自毁式攻击,对于没收到攻击信号的D-UAV可以反复回收利用,这样一种UAV防御方阵对于近地敌机是一种极大的威胁。本文研究单个D-UAV的控制系统,从起飞、侧飞、悬停等待、旋翼收起、攻击一个完整的控制过程。
1 飞行原理
由直升机动力学知识可知,旋翼的拉力与当前飞行高度的空气密度、旋翼的转速、旋翼桨盘的半径以及旋翼的拉力系数有关。
直升机空气动力学公式[3]:

式中:T 为旋翼拉力,kg;ρ为空气密度,kg·s2/m4;Ω 为旋翼角速度,1/s;R为旋翼旋转半径,m;CT为旋翼拉力系数;MK为旋翼反扭矩;mk为旋翼扭矩系数。
由拉力计算公式可知,旋翼拉力与旋翼转速的平方、旋翼旋转半径成正比,其中旋翼的拉力系数CT与旋翼的翼型以及螺距有关,是一个复杂的参数,对于直升机上有些常用的旋翼翼型都可以通过查阅表格获得,同样mk也是通过查表获得。本文所用的旋翼是一种常用的小型航模旋翼,旋翼升力与旋翼转速、旋翼直径、螺距等参数没有明确的关系方程进行表述,因此,通过对旋翼进行测绘,获得旋翼直径、螺距值,然后通过仿真软件进行旋翼升力计算。
试验前期对旋翼拉力的计算进行了理论分析,主要运用数值分析,正交试验,通过MATLAB仿真,归纳出旋翼拉力的经验公式:

式中:F为旋翼拉力,N;n为旋翼转速,r/min;d为旋翼旋转直径,m;k=sinα,α 为旋翼螺距。
如图1所示,D-UAV机体坐标系(xyz)与地面坐标系(XYZ)之间存在3个运动角α、β、γ,利用角度关系可以列出运动学方程:

式中:x、y、z分别为地面坐标下的 3 个位移量;fx、fy为沿x、y轴方向运动的空气阻力;m、J分别为D-UAV的质量和绕z轴的转动惯量;TΣ为z轴方向的合力矩;g为重力加速度;F为上述经验公式得出的旋翼拉力。
本文初步设计时估算出D-UAV的总质量4 kg(包括电源、传感器、电机等各种元器件),总体外形如图2所示,D-UAV长度365 mm,截面为圆形,圆半径约51.5mm,桨盘直径560 mm,旋翼转速3 600 r/min,螺距 α=11.3°,总质量3.8 kg左右。

图1D-UAV机体坐标与地面坐标
2 工作流程
设计的D-UAV结构如图2所示。D-UAV包括图2(a)的悬停状态,以及图 2(b)的攻击状态。整流帽结构是根据导弹飞行时的空气力学特性设计的,一方面减小DUAV垂直向上发射时的空气阻力,另一方面当D-UAV收到攻击信号时,整流帽向下运动带动旋翼折叠,实现旋翼收起的目的。大尾翼内装有螺旋桨,通过电机带轮带动旋转,目的是克服主轴电机旋转产生的反扭矩,保持DUAV平衡。小尾翼一方面和大尾翼一样也具有抵消扭矩的作用,另一方面当D-UAV向上发射时,可以旋转小尾翼,改变飞行时的方向。
本文主要研究D-UAV的控制系统,实现D-UAV的起飞,悬停并且具有一定抗风能力,收到命令后能够迅速地收起旋翼攻击目标或着陆回收。如图3所示D-UAV工作流程图,研究的重点是D-UAV的稳定悬停,并且能够抵抗风速小于4 m/s的侧风影响。

图2 D-UAV三维结构图

图3D-UAV控制流程图
为了实现控制功能,我们搭建了硬件平台。D-UAV控制系统主要由控制器、驱动单元、执行单元以及各种传感器组成。如图4所示,系统硬件结构框图包括主控制器MCU(单片机),8通道2.4G无线接收器无线驱动单元,用于驱动各种舵机与直流电机,陀螺仪、无线数传模块用于测量、传输D-UAV的角度及角加速度信号以及供电模块、地面控制接收器等。
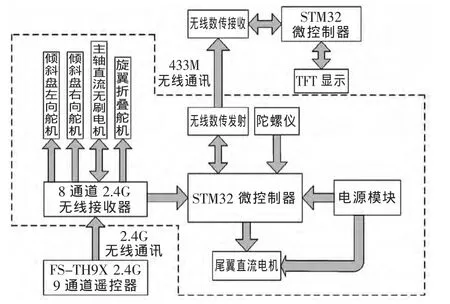
图4 系统硬件结构框图
控制系统主要包括8通道2.4 G无线接收器和MCU主控制器。
如图5所示,8通道2.4G无线接收器一共有8个输出通道,D-UAV的控制使用到了其中5个通道。CH1、CH2连接控制D-UAV倾斜盘左向、右向舵机,这2个舵机控制着倾斜盘,从而实现D-UAV的任意方向的飞行。CH3控制D-UAV旋翼旋转的电机-无刷直流电机,这种电机体积小,功率大,额定电压12 V左右,输入电流50 A,需要动力电池供电。CH4连接旋翼折叠舵机,CH4通道输出信号,D-UAV就收起旋翼,启动尾部火箭发动机,进行目标攻击。CH6输出PWM信号,此信号配合通道CH3同时输出,控制D-UAV的偏航角。

图5 D-UAV控制系统硬件连接
MCU一方面接受8通道2.4 G无线接收陀螺仪输出的角加速度,根据这2个信号叠加输出控制尾翼电机的PWM信号,其中用到模糊PID控制算法,使D-UAV既快又准地根据无刷直流电机的转速变化去调节尾翼电机。同时MCU实时地将D-UAV的姿态角通过无线模块NRF905传输到地面接收器并且显示出来,便于试验数据的采集与处理。
3 系统硬件设计
3.1 主控制器模块
图6为STM32最小系统引脚定义,图中只给出了需要跟外设连接的部分。PA9、PA10的TX、RX与陀螺仪的串口接连,用于读取陀螺仪绕三轴旋转的角度、角速度以及角加速度,也可以读取当前温度值。PB12、PB13、PB14、PB15是STM32的SPI2片内外设接口,这4根引脚分别与无线NRF905的SPI接口连接,用于传输STM32从陀螺仪读出的角度信号。PE7、PE8、PE9这3个引脚决定无线数传模块的工作模式。PD6用于检测数据是否发送完,准备下一次数据发送等待信号。PB6是输入捕获2.4G无线接收器通道6的PWM信号,也是输出PB0信号的重要依据之一。PB0引脚用于输出控制尾翼直流电机的PWM信号,尾翼控制的精度以及响应的速率直接影响飞行器飞行的稳定性。

图6 STM32最小系统
地面的接收器也是STM32F103VET6单片机最小系统,它除了控制地面无线接收器NRF905接收D-UAV的位姿信号外,还通过FSMC模拟8080接口控制TFT彩屏,用于实时地显示接收到的三轴角度信号,便于数据的采集与处理。

图7 NRF905无线模块
3.2 无线通讯模块
控制系统用到2种无线模块:NewMsg-RF905无线收发模块和FS-R8B 2.4 G 8通道接收器。
无线收发模块NewMsg-RF905与MCU采用SPI接口连接,如图7所示,可以通过编程控制PWR_UP、TRX_CE和TX_EN 3根引脚使其工作在4种模式:掉电模式;SPI编程模式;发送模式;接受模式。
当需要发送数据时,首先将PWR_UP、TX_EN拉高,置低TRX_CE使RF905进入编程模式,将需要发送的数据、接收器的地址分别写入到发送寄存器、发送地址寄存器中,然后拉高TRX_CE,射频寄存器自动开启,数据打包后自动发送出去,发送完后数据发送完成引脚DR被置高,准备下一帧数据的发送。当需要接收数据时拉PWR_UP、TRX_CE,置低 TRX_CE,RF905 就会进入接收模式,RF不断地监测,等待接收的数据,当监测到同一频段的载波时,载波检测引脚CD被置高,当接收到一个相匹配的地址时,AM引脚被置高,延时一段时间后接收完毕,RF905自动移去字头、地址和CRC校验位后,将接收数据完成引脚DR置高。RF905发送接收一帧数据的字节数可编程实现,最多可达32个字节。
无线接收器FS-R8B 2.4 G 8通道接收器和FSTH9X 2.4 G 9通道遥控器配合使用,用于控制方向舵机、无刷直流电机以及旋翼折叠舵机等。

图8 FS-R8B 2.4 G 8通道接收器
FS-R8B 2.4G的8个通道输出都是频率50 Hz,高电平0~3.5 ms的PWM信号波。如图8所示,CH3控制的是无刷直流电机的驱动器-电调,通过改变PWM占空比实现无刷直流电机调速,除此之外该通道还给此接收器供电,因此CH3具有双向功能,输出一般只接无刷电调,其他7个通道的功能是一样的,必要时可以互换。CH3和CH6的输出信号是同时改变的,变化的方向一致,变化的线性率可以设置。起飞时主轴无刷电机转速逐渐提高,电机的输出扭矩也逐渐加大,相应的CH6的输出信号的占空比逐渐增大,主控制器收到的信号相应发生变化,通过软件算法及时提高尾翼电机转速,平衡无刷直流电机旋转产生的扭矩,保持D-UAV稳定地飞行。
CH1、CH2分别控制方向倾斜盘左向舵机和右向舵机。这2个舵机连接着倾斜盘,通过控制倾斜盘的倾斜角度,实现D-UAV任意方向的飞行。舵机的输出转角与倾斜盘的方位角之间存在着非线性关系,需要通过复杂的数学计算,大量的试验修正,才能获得精确的数学表达式。舵机的最大输出力矩、保持力矩以及刚度都会影响飞行的稳定性,本文倾斜盘的倾斜角控制在5°~10°之间,采用的2个方向舵机输出力矩达到1.6 kg/cm。
CH4连接旋翼折叠舵机,输出固定的占空比PWM信号,控制D-UAV旋翼收起。当D-UAV收到攻击信号时,旋翼折叠舵机旋转固定的角度,D-UAV立即收起旋翼,启动尾部的固体火箭发动机,使目标附近的D-UAV垂直向上发射攻击目标。旋翼折叠舵机需要克服大摩擦力矩,因此本文选用MG945舵机,输出扭矩达12 kg/cm左右。
3.3 陀螺仪模块

图9 陀螺仪模块
陀螺仪的作用是读出D-UAV三轴的角度,角速度以及角加速度数值。角加速度是驱动尾翼直流电机的重要依据之一,此信号与CH6的输出信号进行叠加,同时控制尾翼电机的转速,使D-UAV稳定地悬停以及调整偏航角。角度信号通过无线RF905传输给地面工作站,实时地显示出来,便于数据的采集与处理。如图9所示,陀螺仪与MCU既可以采用串口通讯,也可以利用I2C接口,但是采用I2C接口通讯时无法读出DUAV姿态值(角度值),所以本文选择串口通讯。MCU无法输出指令给MPU6050模块,模块的配置都是掉电保存的,上电后第3 s自动校准,校准后Z轴的角度会重新初始化为0。MPU6050输出的每帧数据分为3个数据包,分别为加速度包、角速度包和角度包。3个数据包顺序输出,波特率通过上位机设置为115 200 kps时每隔10 ms输出1帧数据,每个数据包输出时都包含有标识这个数据包的标头,通过标头可以判别数据包的类型。
4 系统软件设计
软件部分实现D-UAV的起飞、悬停以及侧飞,主要是陀螺仪的输出信号、主轴无刷直流电机转速以及尾翼电机控制信号三者之间的协调配合。悬停、侧飞流程如图10、图 11所示。
如图12所示,主程序初始后立即采集CH6的PWM信号并转换为平均电压ui,此时主程序查询USART1是否产生中断,如果没有产生中断,CH6的信号就直接控制尾翼,提高程序的快速性;如果产生中断,在中断服务程序中对陀螺仪输出的信号进行处理,分别对3个数据包:角加速度、角速度、角度进行计算存储返回。返回后主程序对ui、绕主轴的角度α和绕主轴的角加速度a¨进行模糊化处理去控制尾翼电机,图10中TW为尾翼电机旋转产生的扭矩,该扭矩主要是抵消主轴直流无刷电机旋转产生的扭矩TZ,陀螺仪根据二者之差△T测出角度α和角加速度α¨,当绕主轴的角加速度、角度都为零时,D-UAV达到稳定状态。
D-UAV飞到指定的位置还需要侧飞,侧飞的指令是由2.4 G FS-TH9X无线发送机和无线接收器FS-R8B控制。当需要侧飞时FS-TH9X操作摇杆发出侧飞指令,FSR8B收到信号后控制CH1、CH2输出PWM信号,倾斜盘左向舵机和右向舵机分别转过一定的角度,通过倾斜盘倾斜实现D-UAV指定方向的侧飞。D-UAV从垂直起飞变换到侧飞时,由于旋翼产生拉力方向改变,因此竖直方向产生的升力就变小,无法平衡重力,所以在倾斜的过程中要增大主轴无刷直流电机的转速,提高旋翼产生的拉力,这个过程也叫做拉力补偿,和悬停过程一样,补偿拉力的过程中也要相应提高尾翼电机的转速,从而保持DUAV位姿。

图10 悬停流程图
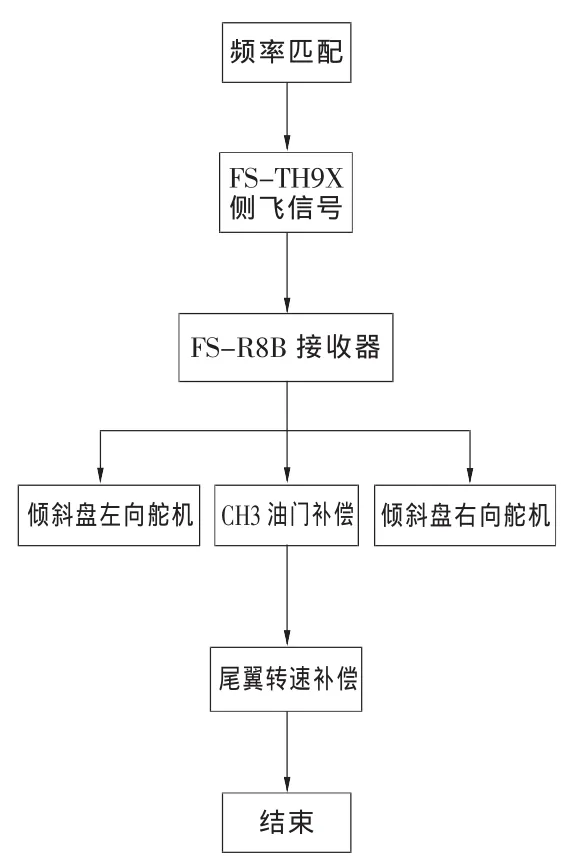
图11 侧飞流程图
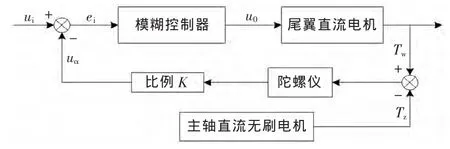
图12 控制系统框图
5结 语
本文设计的D-UAV控制系统结合传统的无线传输模块,加入了嵌入式控制系统,在实现控制飞行功能的同时,使控制系统的稳定性和精度得到了提高,尤其在DUAV侧风状态下也能保持飞行的稳定性。通过大量的飞行试验,反复修正CH6和CH3信号之间的关系,使DUAV成功排列出适用于低空防御的飞行方阵。
[1] 弗里德曼.全球作战无人机[M].聂春明,译.北京:中国市场出版社,2011.
[2] Sevcik K,Oh P.Testing Unmanned Aerial Vehicle Missions in a Scaled Environment[J].Journal of Intelligent and Robotic Systems,2008,54(1-3):297-305.
[3] 王适存.直升机空气动力学[M].南京:南京航空学院,1976.
[4] 王斌,罗秋凤,王海涛.某小型无人机的飞行控制计算机的硬件设计[J].计算机测量与控制,2006,14(10):1355-1357.
[5] 宋彦国,张呈林.小型无人直升机模糊飞行控制系统设计[J].南京航空航天大学学报,2007(1):103-106.
[6] 孙兴宏.基于微机的某型无人机飞控系统的硬件设计及软件[D].西安:西北工业大学,2007.
[7]王赓,盛焕烨,吕恬生,等.“天行者”小型无人直升机自主飞行控制系统设计[J].航空学报,2008(增刊 1):170-177.
[8] 汪斌.无人模型直升机自主飞行控制方法研究和系统构成[D].上海:上海交通大学,2005.
[9] Song Yanguo,Zhang Chenglin,Chen Renliang.Synthesis of helicopter fuzzy flight control system and its simulation[C]//AHS 51st Annual Forum.Baltimore:American Helicopter Society,2004:1300-1308.
[10] Shim D H,Han J S,Yeo H T.A Development of Unmanned Helicoptersfor Industrial Applications [J].Journal of Intelligent and Robotic Systems,2008,54(1-3):407-421.
[11] Amanda H,Natalie K,David P.Unmanned Aerial Vehicles(UAVs) for Surveying MarineFauna:A Dugong Case Study[M].PLOS ONE,2013:8-11.
