矿浆均密搅拌控制方法研究
2015-05-07高冲姜磊马学毅张兴华王世杰
高冲, 姜磊, 马学毅, 张兴华, 王世杰
(1.沈阳工业大学 机械工程学院,沈阳110870;2.北方重工集团 矿山机械分公司,沈阳 110870)
0 引 言
矿浆搅拌装置是矿浆搅拌成套设备中的重要组成部分,在矿业生产中得到广泛应用,在医药、化工、材料合成行业的生产线中也十分常见[1]。为保证矿浆搅拌效果,现多采用搅拌装置配置高功率的电动机的方法,但矿浆的高浓度、高黏度、高密度等特殊属性,使得搅拌装置虽然尽可能地减少沉槽的发生,但是不可避免地增大了功耗,降低了生产效率[2]。除此之外液位增加时,主轴自然压力随着减小,但相应增加了提升矿浆所耗的电能以及减小了搅拌器的有效容积,这也不利于矿浆搅拌装置工作。针对上述问题开发了一种基于PLC的矿浆匀密搅拌控制系统,实现系统通过检测搅拌矿浆浓度,调节电机输出转速,达到实时调节搅拌强度、保证排料浓度的目的。
1 矿浆搅拌装置的设计原理
矿浆搅拌装置工作的最终目的在于提高矿浆的搅拌效果。大型金属矿浆搅拌装置的搅拌目的是将固、液两相物系非均相分散,使其处于悬浮状态[3]。此类搅拌装置的搅拌效果可以由浓度的高低来表示。在物料添加量相同时,颗粒的轴向浓度随着搅拌装置的转速的升高而提高[4-5]。这是搅拌装置的电机输出高转速,为设备提供较高的搅拌动力,混合物料在高搅拌动力的作用下,能够搅拌得更加充分均匀,使物料在槽底堆积量降低。当矿浆浓度低时就表明需要提高矿浆搅拌强度。本装置就是根据此原理进行设计的。
具体应用中,根据DF-6420超声波浓度计的工作原理是当超声波在矿浆类悬浮液中传播时,根据矿浆中固体量的多少及粒子大小与其振幅变化的关系,测量超声衰减量得到相应浓度值。根据声学原理,平面超声波在矿浆中传播时,其电压E的变化可用下式表示:

式中:Er为发射电压;α为衰减系数;L为传播距离。
悬浮粒子引起的衰减率可由下式求得:

由浸入式传感器接受到的声波幅度将伴随矿浆浓度的增加而衰减,因此声波幅度对应转换后的电压值也随矿浆浓度的增加而衰减,将浓度-电压衰减曲线经过标定后,即可从测量电压得到浓度值。因此,浓度输入信号通过PID算法控制,根据浓度与电机转速的线性关系,通过指令调节输出的模拟量信号给变频器,从而控制电机。
2 PLC控制系统硬件设计
2.1 控制要求
在搅拌装置侧壁安装有液位开关,上液位开关ST1、中液位开关ST2、下液位开关ST3;KM2、KM3分别为进料电磁阀和出料电磁阀。
1)在初始状态下,容器为空,向容器内添加矿浆,此时启动搅拌装置可以由人工当按下开关SB1,KM线圈得电,变频器和电机接入三相交流电源,搅拌装置启动;也可以直接向装置内加入矿浆,当液面到达下液位开关时,下液位开关动作,搅拌装置启动。
2)当矿浆液面高于出料口高度,则上液位开关动作,此时进料电磁阀闭合,以降低液面。当液位降低到中液位开关以下,进料电磁阀恢复到原有的通路状态。
3)超声波浓度测量排出矿浆浓度,通过PID控制,根据电机转速与排料浓度的拟合曲线所得的数量关系,相应输出电机转速,保证排出矿浆达到要求范围。
4)当变频器故障时,开关动作,KM线圈失电,指示灯显示变频器发生故障,变频器与三相交流电源中串联的KM开关断开,变频器失电,起到安全保护的作用。

图1 矿浆匀密搅拌控制装置系统硬件接线图
2.2 硬件电路的设计
按照控制要求,以西门子S7-300系列PLC为例,设计的PLC与变频器组成的控制系统硬件接线图如图1所示,I/O分配表如表1所示。系统主要由以下3个功能模块组成:1)控制模块。S7-300系列产品具有高性能的中央处理器,其各种性能的模块可以很好地满足和适应自动化控制任务。简单实用的分布式结构和通用的网络能力,使得应用十分灵活,当控制任务增加时,可以自由扩展[6]。2)检测模块。浓度采用超声波浓度测量计采集矿浆搅拌装置内的模拟量信号,速度传感器检测电机的实际输出电压信号,不断调节转速至要求范围内。3)执行机构。包括变频器、电机、电磁阀等。整个工段的控制系统主要完成了对现场数据的采集、滤波;采集的模拟量信号通过控制回路中PID(比例、积分、微分)参数的设置及控制以及其与速度的数量关系的设定计算;液位控制阀等功能。

表1 系统输入/输出信号地址分配表

图2 控制系统工作原理图
3 控制算法和软件设计
该装置涉及多种控制,下面将着重讲述浓度控制部分。在实际应用中对矿浆浓度使用闭环PID控制,PID是典型的闭环控制算法,是连续系统中应用最成熟、最广泛的调节方式[7]。本装置是通过电机转速与矿浆浓度的关系(用W表示),在每次PID循环中相应地调节电机转速,由于控制器输出的控制信号是用于完成矿浆搅拌装置的转速的调节,即其输出值与转速的大小一一对应的关系,故采用位置式PID算法。PLC控制系统设计原理图如图2所示。
其中PID控制器的原理表达式为

式中:t为时间;u(t)为 PID 算法的输出;e(t)为系统设定值与过程检测值的偏差;Kp为放大系数 (增益或放大倍数);TI为积分时间常数;TD为微分时间常数。
PLC控制程序的PID算法采用的其内部自带的指令功能块来执行,PID回路的编号、给定值范围、比例增益、采样时间以及积分时间,对浓度进行PI运算。按照设定的采样周期来执行PID功能块。
图3为控制系统工作原理图。当向导参数设置后,自动生成第X号回路的初始化子程序、中端程序、符号表和数据块。图4为PID初始化指令,完成对PI运算的采样时间、比例增益、积分时间和微分时间等的初始化。

图3 系统控制流程图
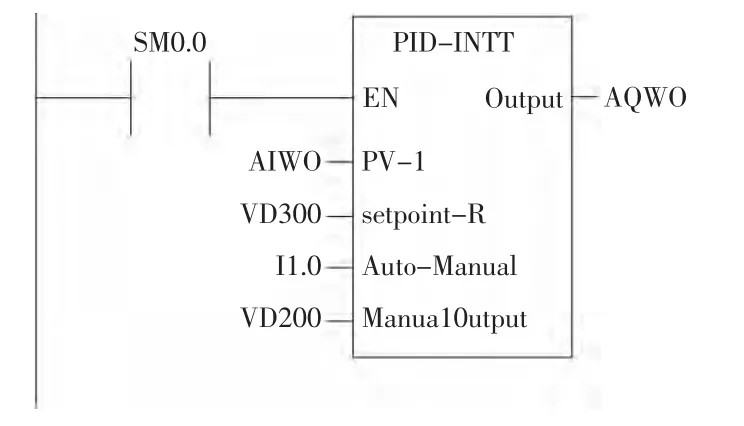
图4 PID初始化指令
4结 论
矿浆均密搅拌装置系统,将浓度和转速模拟量检测信息及液位开关数字量信息传送至PLC控制系统进行相应计算及控制,达到了根据工况需求调节搅拌强度、安全控制液位、保证排料质量的目的。该系统是在原有设备基础上进行改进,应用方便、结构简单,符合节能理念,并为搅拌装置提供适当的搅拌空间,实现了对矿浆浓度的自动控制。
[1] Alvarez M M, Zalc J M,Shinbrot T,et a1.Mechanisms of mixing and creation of structure in laminar stirred tanks [J].AIChE Journal,2002,48(10):2135-2148.
[2] 杨建桥,黄德镛.矿用充填料搅拌机研究进展[J].中国非金属矿工业导刊,2011(5):61-63.
[3] 陈志平,章序文,林兴华.搅拌与混合设备设计选用手册[M].北京:化学工业出版社,2004:3-5.
[4] 杨峰苓,周慎杰,张翠勋,等.无挡板搅拌槽的固液悬浮特性[J].四川大学学报,2012(4):185-190.
[5] 王淑婵,张延安,张超,等.种分槽改进Intermig桨搅拌性能的实验研究[J].过程工程学报,2011(2):204-208.
[6] 廖常初.PLC编程及应用 [M].北京:机械工业出版社,2010:122-123.
[7] 马明,陈海峰.基于PLC的真空挤砖机进料湿度控制系统的设计[J].机械设计与制造,2011(1):36-37.
