水稻钵苗旋转式拔秧机构
2015-05-07郑鑫文学洙
郑鑫, 文学洙
(延边大学工学院机械工程系,吉林延吉133002)
0 引言
水稻钵苗移栽是一种高产的水稻移栽新技术,具有钵苗浅栽、无缓苗期、分蘖早、根系发达等优点[1]。水稻钵苗移栽机不仅能够保证植苗的直立度,而且不伤秧,相比插秧方式能增产10%~15%,目前国内外都在投入研究中。日本研究的水稻钵苗摆栽机,价格过高、结构复杂,不适合中国的水稻国情[2]。现国内已研究出几种水稻钵苗移栽机:多杆式移栽机构,结构较为复杂,移栽效率低,受机构限制,移栽效率很难再提高;集取苗与栽植功能为一体的水稻钵苗移栽机机构,在旋转齿轮盒上装有2个对称的移栽壁,具有平稳性[3],且工作效率高,但是在植入土中有伤秧的可能性;由中国农业大学研制的水稻钵苗对辊式拔秧机构[4],该机构的输秧辊参数受到育秧盘结构尺寸的影响,且拔秧力呈曲线形态,不能保持恒定的力。而本文介绍的旋转式拔秧机构结合国内外钵苗移栽机的特点,将拔秧过程与栽植过程分开进行,具有价格低廉、工作效率高的特点,拔秧机构可以保持恒定的拔秧力并且旋转到指定的位置,摆放秧苗。该拨秧机构已获得国家发明专利。
1 旋转式拔秧机构工作原理
本文所研究的钵苗移栽机是在原有插秧机的基础上进行改装的,所以钵苗秧盘无需另行配套,使用正交式秧盘即可。为了减小工作量,设计了实验台来对各参数进行分析。实验台使用的送秧机构是由非圆齿轮传动的具有间歇性的简易送秧机构,而在样机中使用棘轮机构及螺旋轴机构传动的秧箱进行送秧。设计拔秧机构前对水稻秧苗抗拉断力及穴盘拔秧所需的力进行了试验。从实验数据可知,秧苗的抗拉断力远远大于拔秧力,因此采用此拔秧机构将秧苗拔出是可行的[5]。如图1所示为旋转式水稻钵苗送秧、拔秧机构简图。

图1 水稻钵苗送秧、拔秧机构简图
该机构是由分秧轨道、拨杆、拢秧帘、拔秧齿轮壳、拔秧爪以及摆秧台组成,拔秧部分左、右爪的表面粘有一层弹性材料,以免在夹取秧苗时损伤秧苗,同时可以增大秧爪表面的摩擦力。该机构包括传动和拔秧爪两部分,其工作原理是:非圆行星轮系组成的回转体绕太阳轮转动,同时固结在行星轮轴上的拔秧爪一方面绕行星架作匀速圆周运动,另一方面随着行星轮相对行星架作非匀速间歇转动,这样在两个运动的合成下,拔秧爪的尖点形成了特殊的拔秧轨迹。拔秧爪在距秧苗钵体表面一定距离的位置将秧苗拔起,并带动秧苗一起运动,按着固定的轨迹运动到摆秧台合适的位置,将秧苗摆放到摆秧台上,随后由打移植机构将摆秧台上的秧苗打入土中(本文不对打移植机构介绍)。
旋转式拔秧机构,利用拔取方式取苗,具有秧苗损伤小,机构简单以及振动小的特点。而本文重点是设计一个可以在指定位置拔取秧苗以及摆放秧苗的拔秧爪机构。
2 拔秧爪总成简图
文中所提到的拔秧爪总成简图如图2所示,当左右凸爪在弹簧力的作用下与内侧凸轮左侧面、右侧面接触时,秧爪被打开,随着拔秧壳绕内侧凸轮的转动,左右凸爪转动到内侧凸轮开口的位置,在弹簧力的作用下,左右凸爪焊合件绕着凸爪轴心转动同样大小的角度,秧爪闭合,此时即为拔秧的位置。而在回转体上装有在压片作用下与回转体固结的可调的拔秧牙嵌,拔秧牙嵌与内侧凸轮牙嵌相结合,即可控制拔秧爪开口的初始位置。
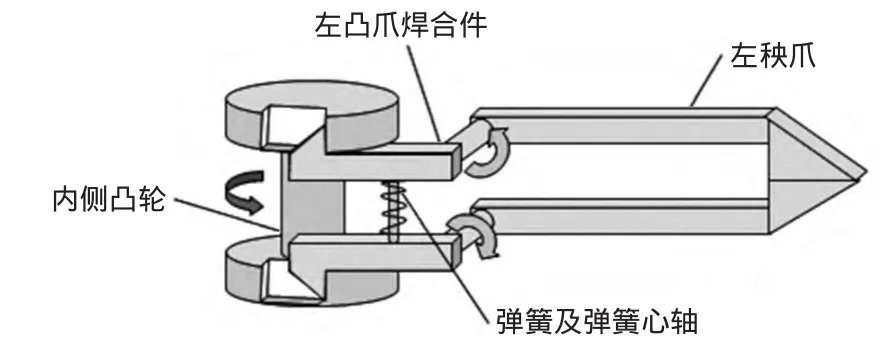
图2 拔秧爪总成简图
2.1 秧爪开口大小的确定
在左右凸爪焊合件尺寸不变的情况下,开口大小由内侧凸轮左侧面到右侧面的距离S决定,内侧凸轮如图3所示。

图3 内侧凸轮
当S减小时,秧爪开口增大。然而钵苗秧盘单穴直径是17 mm,所以在此秧爪开口不能超过20 mm。

图4 内侧凸轮开口角度
2.2 秧爪开闭爪的确定
如图4内侧凸轮开口角度φ,秧爪开闭爪早晚随着φ的增大而增加,所以可以通过实验来任意定位在轨迹上摆放秧苗的位置。实验过程中,取凸轮开口角度 φ 为 86°、88°、100°并分别进行加工试验,在秧爪每秒 80次、100次、120次下分别进行试验,发现秧爪都提前开爪,齿轮盒旋转导致秧苗在惯性力及离心力的作用下甩出摆秧台。同样增加开口角度达到126°后,秧苗能够准确稳定地被摆放到轨迹中规定的位置,并且不会受离心力和惯性力的影响,此时拔秧爪尖端的力均处于衰减状态,也是选择摆秧位置的依据。拔秧位置如图1所示,摆秧位置如图5所示。

图5 摆秧位置
2.3 秧爪夹紧力的确定
根据对秧苗拔秧力的力学实验,得到在各种工况下,拔秧力F的范围为1.4~4 N。在此要使用极端法,取最大的拔秧力,以应对拔取各种秧苗。在秧爪的表面上粘有一层弹性材料(黑色胶皮),通过实验测出材料表面的摩擦因数μ,再由已知的拔秧力F,可以求出秧抓尖点需要的夹紧力

式中σ为安全系数。
这样通过静力学可以计算出所需的弹簧力Ft。

式中k为弹簧刚度系数。
依据式(3)和两凸爪间垂直距离,确定弹簧的自然长度L,取得合适的弹簧力,以免弹簧力过大导致秧爪伤秧,或者弹簧力过小,拔不出秧苗。

图6 拔秧壳盖
2.4 拔秧壳盖
为了防止秧爪在闭爪的过程中,产生左右移动,同时限制弹簧的压缩长度保持不变,在拔秧壳盖上左右两侧,分别设有两个凸台,起到限位作用,其中间距离刚好与S相等,拔秧壳盖如图6所示。
3 试制与试验
对旋转式拔秧机构实验台的设计与试制后,经过多次拔取以及摆放秧苗的试验,得到内侧凸轮开口夹角为128°时,能在预定的位置拔取秧苗及摆放秧苗。在对实验过程进行了录像记录,在每秒120次内可以准确地拔秧与摆放秧苗。
4 结论
1)旋转式拔秧机构可实现准确拔秧,并能够在准确的位置将秧苗摆放至摆秧台,具有结构简单、稳定性好、振动小等特点。
2)容易对拔秧爪各参数进行更改,使其满足拔秧与摆秧需要。
3)通过该机构的运动及试验分析,确定了机构工作参数,其中内侧凸轮开口角度设定128°,秧爪开口角度20°较合适。通过多次拔取秧苗的试验,可知该机构满足水稻钵苗拔取要求。
[1] 张洪程,戴其根,岳枫,等.抛秧稻产量形成的生物学优势及高产栽培途径的研究[J].江苏农学院学报,1998,19(3):11-17.
[2] 成永芳.日本RX-6型水稻钵苗移栽机引进试验简报[J].农机与食品机械,1999(3):27-31.
[3] 俞高红,黄小艳,叶秉良,等.旋转式水稻钵苗移栽机构的机理分析与参数优化[J].农业工程学报,2013,29(3):16-22.
[4] 宋建农,黄育仕,魏文君,等.水稻钵苗对辊式拔秧机构[J].江苏大学学报:自然科学版,2006,27(4):291-294.
[5] 宋建农,王萍,魏文君,等.水稻秧苗抗拉力学特性及穴盘拔秧性能的力学实验研究[J].农业工程学报,2003,19(6):10-13.
