变电所绝缘子水冲洗机器人设计
2015-05-07于兰英吴文海谭万秋
姚 波,于兰英,吴文海,柯 坚,谭万秋
(西南交通大学机械工程学院,四川成都 610031)
铁路变电所是铁路电力系统重要组成部分,负责将区域电网电能转换为适合电力牵引的电能。变电所绝缘子长期暴露在空气中,灰尘和其他污染物集聚在绝缘子表面,当空气湿度较大时,绝缘子表面污染物吸收水分,使得绝缘子表面的电导率增大,绝缘子的电气绝缘性大大降低,可能导致污闪事故[1]。为预防污闪事故的发生,需定期对绝缘子表面进行清理。目前主要的清理方式是带电水冲洗,包括固定式水冲洗和移动式水冲洗两种,其中固定式水冲洗一般应用于环境污染严重地区;移动式水冲洗使用移动水冲洗设备(如消防车或轮式带电水冲洗车),采用人工手持水枪的方式对绝缘子进行带电水冲洗,这种方式对冲洗操作人员的技术水平和操作流程要求较高,并且需要较高的安全防护措施[2-3]。本文提出的绝缘子冲洗机器人与水冲洗车相结合,可取代人工对绝缘子进行冲洗,提高冲洗效率和自动化水平。
1 水冲洗机器人冲洗方案研究
水冲洗机器人主要针对铁路变电所内电压等级在110kV以下的绝缘子,铁路变电所内主干道路面宽度一般大于3.5m[4],而所内巡视小道一般宽为1m,大型水冲洗车辆只能停在主干道上,无法靠近绝缘子分布区域。为对变电所内绝缘子进行精确冲洗,笔者采取的冲洗方案为冲洗车+冲洗机器人的组合形式,冲洗机器人可通过巡视小道靠近绝缘子区域。如图1所示,水冲洗车载有柴油发电机、电动机、离心泵、水箱等水冲洗配套设备[2]。工作时柴油发电机驱动电动机,电机带动离心泵,水箱内的高电阻率水经离心泵增压后,由冲洗机器人水枪射出。
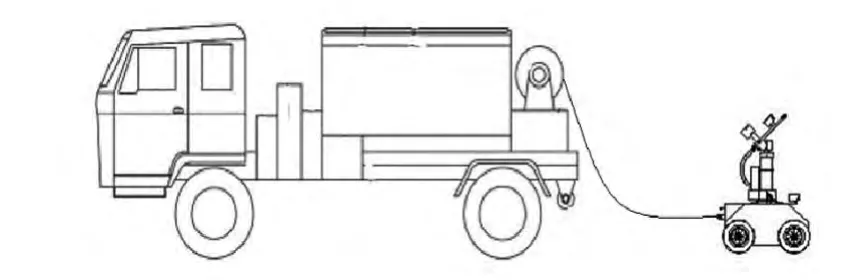
图1 冲洗方案
2 水冲洗机器人总体结构设计
绝缘子水冲洗机器人如图2所示,包括冲洗机构、行走机构、通水管路、控制箱、蓄电池等部件。行走机构主要实现冲洗机器人的位置移动;冲洗机构主要实现水枪的瞄准;控制箱控制机器人各机构的运动;蓄电池为机器人各项设备提供动力;通水管路连通水冲洗车水箱和机器人水枪;下摄像机用于实时提取机器人周围环境信息;上摄像机和光电距离传感器安装在水枪支架上,上摄像机用于提取绝缘子图像信息,光电距离传感器用于测量绝缘子与水枪之间的距离;冲洗机器人采用防淋雨设计,外壳用不锈钢薄板制成;机器人尾部地线与变电所的地线端相连,起安全保护作用。
2.1 水冲洗机器人行走机构
水冲洗机器人行走机构主要实现机器人的自由移动。

图2 绝缘子水冲洗机器人结构示意图
因为铁路变电所内道路主要为水泥路面,路面平整且附着情况良好,所以水冲洗机器人采用轮式移动底盘,如图3所示。底盘轴距L=600mm,轮距B=720mm,为精简底盘结构和提高运行可靠性,转向方式采用滑移转向方式,机器人的最小转向半径,可以在宽度仅为1m的巡视小道转向。
水冲洗机器人的移动采用远程遥控,由于运动精度要求不高,因此可采用双直流无刷电机作为驱动源,每个电机输出经过减速机后带动两根同步带,以此驱动机器人一侧的两个车轮;机器人前端的车轮内侧安装有电磁离合器,在机器人冲洗作业时为保持底盘静止,电磁离合器通电结合锁死车轮。
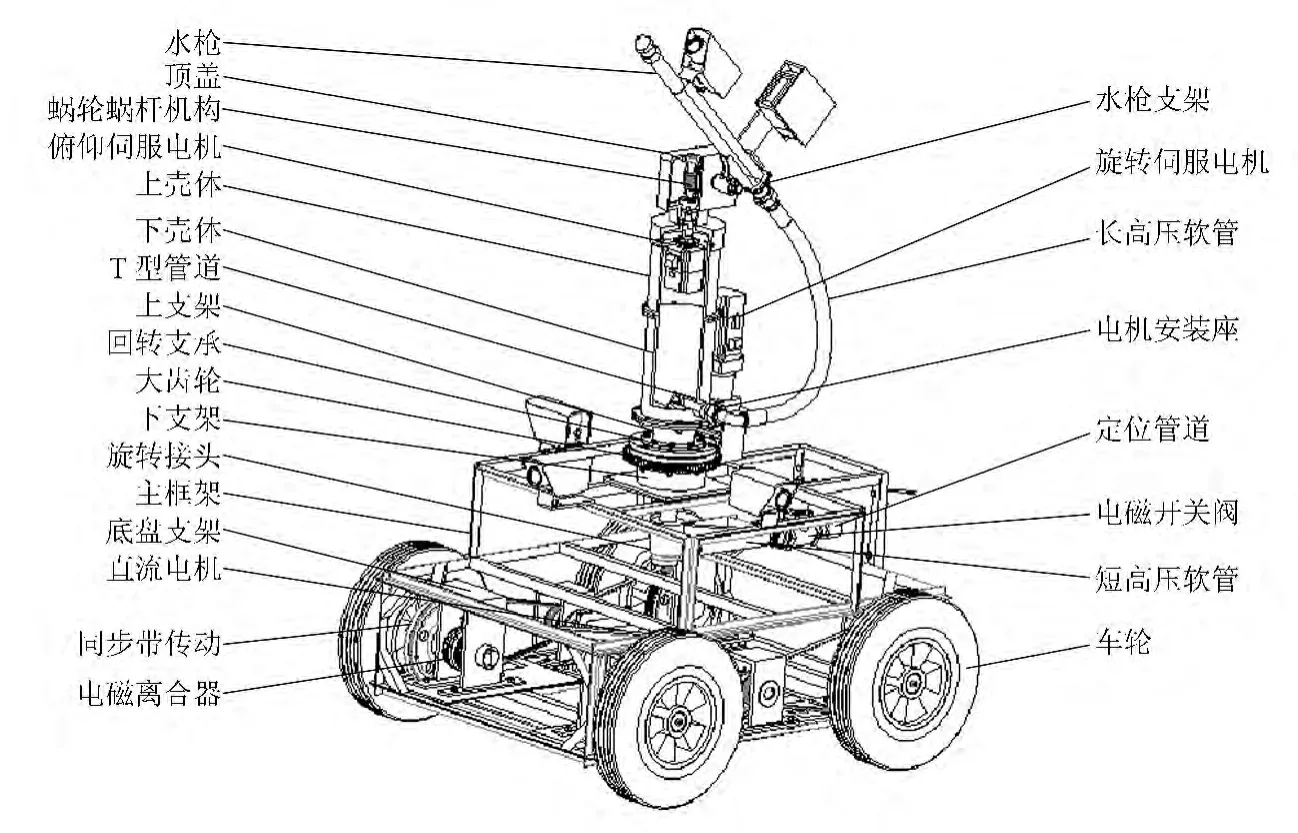
图3 水冲洗机器人内部结构示意图
2.2 水冲洗机器人冲洗机构
水冲洗机器人冲洗机构功能为调整水枪姿态,瞄准绝缘子实现冲洗。机器人水枪安装高度为1.1m,绝缘子底部距地面高度大于 2.5m[4],绝缘子长度为1.0m~2.4m,另根据带电水冲洗规范要求,可知110kV级别绝缘子冲洗水柱长度不得小于3m[5],由几何关系,可确定机器人冲洗作业时,水枪的俯仰角度变化范围为16°。由于在绝缘子瞄准过程中,机构运动精度要求较高,因此选用伺服电机作为冲洗机构驱动电机。
冲洗结构如图3所示,包括旋转机构和俯仰机构[6],旋转机构通过齿轮传动机构带动旋转支承和其上支架转动;俯仰机构采用有自锁功能的蜗轮蜗杆传动机构,带动水枪俯仰运动。两机构均采用伺服电机驱动,伺服电机控制精度高、运行平稳,可实现对绝缘子的精确瞄准,其中旋转伺服电机配带制动器。
2.3 水冲洗机器人管路系统
水冲洗机器人管路系统如图3所示,水枪通过高压软管与焊接在下壳体的T型管道连接,T型管下部安装旋转接头,可实现管路的旋转运动,旋转接头连接电磁开关阀,控制整个管路系统的连通和关闭。冲洗机器人与水冲洗车之间采用纤维增强软管连接,对水冲洗车上的冲洗配套设备起绝缘保护作用。整个管路系统最大工作压力为2MPa,考虑水枪喷射流量,管路内径选择为19mm。
2.4 水冲洗机器人主要性能参数
水冲洗机器人主要性能参数见表1。
3 水冲洗机器人滑移转向条件分析
水冲洗机器人采用滑移转向方式,底盘尾部拖动有软管,软管最长为20m,经过计算,需克服摩擦力最大为50N,对机器人滑移转向性能存在较大影响,需对机器人能否实现滑移转向进行分析。
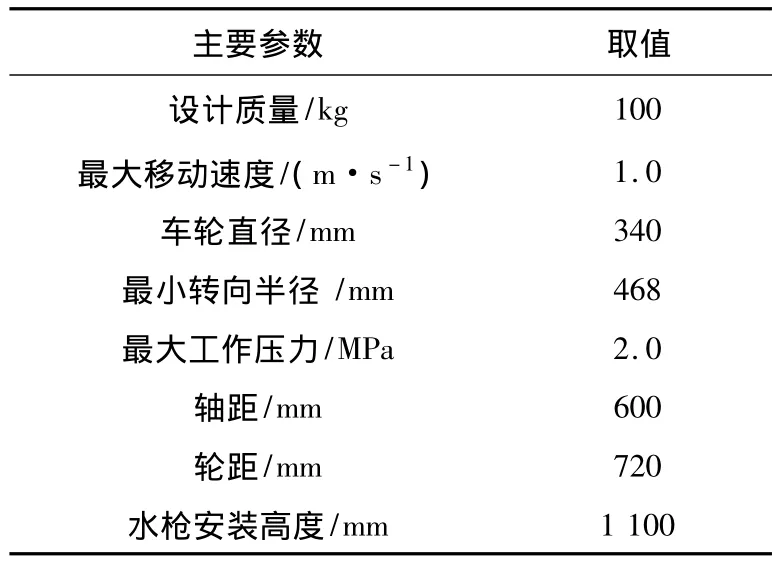
表1 水冲洗机器人主要性能参数
机器人滑移转向时四轮受力情况复杂,为方便分析,假定机器人以低速转向,忽略加速度的影响,并作以下限定[7]:
1)忽略轮胎的接地面积,将地面与轮胎的接触看作点接触,轮胎的中心为接触点。
2)忽略离心力影响,车轮纵向速度为常量。
3)假定每个轮胎的附着力相等,即

式中:Fφ为单个轮胎的附着力;φ为附着系数。
4)机器人转向速度较低,不考虑载荷转移,则每个轮胎的滚动阻力

式中:f为滚动阻力;μ1为滚动摩擦系数。
5)转向时,每个轮胎的侧向阻力P与车重G成正比,即

式中:P为侧向阻力;μ2为滑动摩擦系数。
简化后的底盘受力如图4所示,点O为底盘几何中心,假定原地转向时绕瞬心O转动。
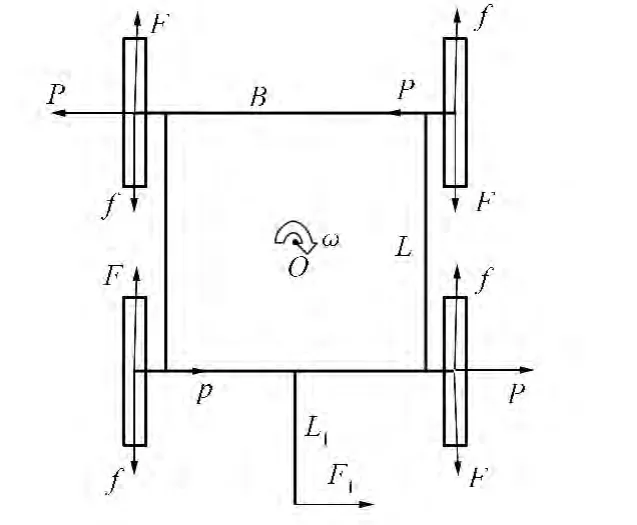
图4 水冲洗机器人转向四轮受力图
由式(2)、(3)和力矩平衡可得:

式中:F为每个车轮的驱动力;B为底盘轮距;L为底盘轴距;L1为拖动水管与轮轴距离;F1为水管对机器人的拉力。
冲洗机器人工作路面为混凝土路面,φ=μ2=0.9,μ1=0.02,G=1 000N,L1=0.06m,F1=50N。当四轮机器人能够实现滑移转向时,需满足,即:
将冲洗机器人的B和L的值带入式(5),计算结果满足条件,即冲洗机器人可拖动水管实现滑移转向。
4 水冲洗机器人作业稳定性分析
当冲洗机器人进行冲洗作业时,水柱对机器人存在反冲力,在机器人轮胎锁死的情况下,轮胎和地面可能出现相对滑动,当反冲力足够大时机器人甚至可能会出现倾翻现象,造成极大安全隐患,因此有必要校核机器人稳定性。
变电所路面最大坡度仅为 3.5°[4],对作业稳定性影响较小,忽略不计,又因冲洗机器人的轮距大于轴距,可知水枪朝行进方向水平冲洗时,冲洗机器人出现滑动或倾倒的可能性最大。冲洗机器人选择的水枪喷嘴大小和冲洗压力不同时,作用给机器人的冲洗反作用力不同。根据冲洗实验所得数据,冲洗最大反冲力F2=100N。
机器人的最大静摩擦力为 f1,计算得 f1=Gμ2>F2,即最大静摩擦力大于反冲力,机器人冲洗作业时底盘不会出现轮胎滑移现象。
假定机器人重心位于底盘中垂线上,机器人的倾翻力矩为 M1,稳定力矩为 M2,水枪安装高度H=1.1m,底盘轴距 L=0.6m,根据公式 M1=F2H,M2=0.5LG,计算得M1< M2,即稳定力矩大于倾翻力矩,可知冲洗机器人朝行进方向水平冲洗时不会出现倾倒现象。综合可得机器人冲洗作业时稳定性符合要求。
5 结束语
本文针对铁路变电所环境,开发设计的新型绝缘子水冲洗机器人结构简单可靠、体型小、控制简单。但由于条件限制,设计过程主要倾向于理论分析和计算,缺乏实物实验支撑,后续将研究通过机器人的制造和相关实验,对机器人结构进行优化。
[1] 徐和明,曹建.绝缘子污闪事故发生的原因及防止措施[J].安徽电力,2005,22(1):19 -25.
[2] 王佩,于兰英,王国志,等.铁路牵引变电所轮式带电水冲洗车设计[J].中国铁路,2013(1):79-81.
[3] WANG Ruzhang,SUN Lin.Safety and technique of hot washing[C]//ESMO'93 - 1993 IEEE 6th International Conference on Transmission&Distribution Construction&Live-line Maintenance Proceedings.Nevada,USA:IEEE,1993:225 -239.
[4] TB 10009-2005铁路电力牵引供电设计规范[S].北京:中华人民共和国铁道部,2005.
[5] GB/T 13359-2008电力设备带电水冲洗导则[S].北京:中国标准出版社,2008.
[6] 王国志,王兴民,单宝成,等.KJ-A型电气化铁道绝缘子带电水冲洗装置的研制[J].电气化铁道,2003(1):26-28.
[7] 张国君,杨世文.四轮车轮滑移转向结构条件分析[J].拖拉机与农用运输车,2007,34(4):22 -24.
