执行器失效故障的PD型迭代学习容错控制
2015-05-06夏钧陶洪峰
夏钧+陶洪峰

摘 要:针对发生执行器失效故障的时变控制系统,提出了一种基于迭代学习律的容错控制方法。该方法采用了PD型迭代学习控制律,利用重复过程的批次信息反复进行迭代学习,缩小控制器的输出误差,跟踪系统预设的期望轨迹。随后,利用算子理论和 范数论证了系统保持鲁棒稳定和良好跟踪性能的充分条件。该条件能够有效抑制执行器故障,将系统的实际输出收敛在预设轨迹的邻域内。仿真结果说明,此算法收敛速度快,不仅能确保故障系统渐进稳定,而且具有良好的跟踪性能,是一种易于实现并且稳定、有效的容错控制算法。
关键词:容错控制;迭代学习;PD型学习律;执行器故障
中图分类号:TP273 文献标识码:A DOI:10.15913/j.cnki.kjycx.2015.08.006
随着现代社会生产力的不断提高,容错控制系统已经成为了学术界和工程界研究的焦点。容错控制系统能够保证系统在执行器或传感器发生故障的情况下,不需要调整控制策略依然可以保持鲁棒稳定和一定的系统性能。这些特点使得容错控制系统被广泛运用于航天、化工、核能等安全性能要求极高的领域。正因为它应用范围广,设计简单,并且有很强的实时性,所以,成为了热点研究课题。
近年来,许多学者研究了发生执行器故障的容错控制系统。文献[6]利用线性矩阵不等式(LMI)技术对非线性系统进行状态反馈补偿,设计了离线可恢复故障模式的容错控制器,提出了4种主动容错控制器来满足系统的不同需求。由于使用了被动容错控制方法,控制器的保守型较强。文献[7]针对高速运行条件下的PMSM系统的位置传感器故障,利用缩放法估计系统的转速和位置,然后结合最大似然算法,使系统保持鲁棒渐进稳定。文献[8]在卫星姿态控制系统发生了一个或多个飞轮故障的情况下,用BackStepping方法设计了在线自适应容错控制器,使得控制器对参数、干扰和执行器故障有很强的鲁棒性,保证了系统闭环的稳定性。但是,该方法只针对执行器完全失效的情况,并没有讨论其他执行器故障比如卡死、部分失效等。文献[9]利用T-S模糊模型设计了可靠控制器,最后利用Lyapunov方法证明了系统的稳定性,取得了良好的效果。
迭代学习控制算法被广泛应用于工业制造、机器人控制等重复性强的生产过程中。文献[10]将迭代学习过程抽象为时间和批次2个维度的学习过程,将传统的迭代学习过程转换为二维模型,使其输出满足预设的跟踪条件。但是,该文献并没有考虑执行器故障的情况,并且系统需要满足一定的线性条件才能使用。
本文提出了利用迭代学习控制算法解决重复系统发生执行器故障后的控制问题。针对连续时变系统,提出了一种开环PD型迭代学习律,并结合算子理论和范数理论分析了系统控制器保持稳定的充分条件。仿真结果表明,本文的算法收敛性快、实时性强,保证了系统在发生故障的情况下的鲁棒稳定性。
1 问题描述
考虑如下线性连续时变系统:
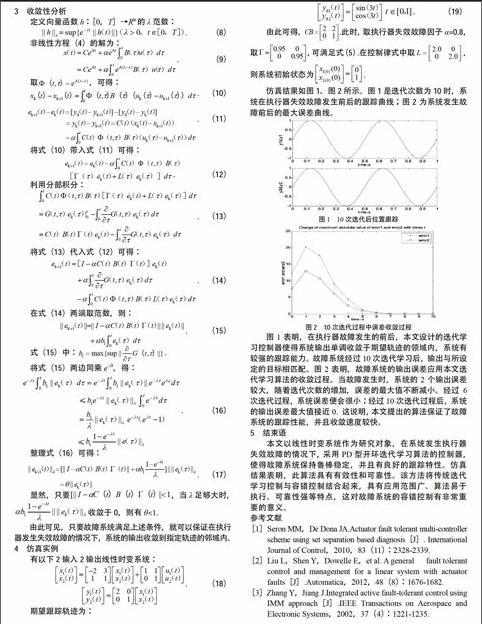
图1表明,在执行器故障发生的前后,本文设计的迭代学习控制器使得系统输出单调收敛于期望轨迹的领域内,系统有较强的跟踪能力。故障系统经过10次迭代学习后,输出与所设定的目标相匹配。图2表明,故障系统的输出误差应用本文迭代学习算法的收敛过程。当故障发生时,系统的2个输出误差较大,随着迭代次数的增加,误差的最大值不断减小。经过6次迭代过程,系统误差便会很小;经过10次迭代过程后,系统的输出误差最大值接近0. 这说明,本文提出的算法保证了故障系统的跟踪性能,并且收敛速度较快。
5 结束语
本文以线性时变系统作为研究对象,在系统发生执行器失效故障的情况下,采用PD型开环迭代学习算法的控制器,使得故障系统保持鲁棒稳定,并且有良好的跟踪特性。仿真结果表明,此算法具有有效性和可靠性。该方法将传统迭代学习控制与容错控制结合起来,具有应用范围广、算法易于执行、可靠性强等特点,这对故障系统的容错控制有非常重要的意义。
参考文献
[1]Seron MM,De Dona JA.Actuator fault tolerant multi-controller scheme using set separation based diagnosis[J]. International Journal of Control,2010,83(11):2328-2339.
[2]Liu L,Shen Y,Dowelle E,et al. A general fault tolerant control and management for a linear system with actuator faults[J].Automatica,2012,48(8):1676-1682.
[3]Zhang Y,Jiang J.Integrated active fault-tolerant control using IMM approach[J].IEEE Transactions on Aerospace and Electronic Systems,2002,37(4):1221-1235.
文章编号:2095-6835(2015)08-0008-04
[4]Hwang I,Kim S,Kim Y,et al.A survey of fault detection isolation and reconfiguration methods[J].IEEE Transactions on Control Systems Technology,2010,18(3):636-653.
[5]吴方圆,孔峰,姚江云.线控转向汽车传感器的智能容错设计[J].计算机仿真,2012,29(5):343-347.
[6]余臻,刘利军,沈毅. 容错控制器设计及其在线优化选择容错控制[J].控制理论与应用,2014,31(4):417-424.
[7]韩艳萍,李红梅.位置传感器故障的PMSM系统容错控制[J].合肥工业大学学报,2013,36(5):551-554.
[8]蔡超,姚雪莲,齐瑞云.卫星姿态系统执行器故障的自适应控制设计[J].航天控制,2013,31(4):46-55.
[9]张刚,王执铨,韩祥兰.执行器故障下不确定非线性系统的鲁棒保成本控制[J].信息与控制,2006,35(4):474-480.
[10]Wang Limin,Mo Shengyong,Zhou Donghua,et al. Robust delay dependent iterative learning fault-tolerant control for batch processes with state delay and actuator failures[J].Journal of Process Control,2012, 22(7):1273-1286.
〔编辑:白洁〕
