基于步法的跑步机速度跟踪控制方法
2015-05-06孙怡宁马书芳
刘 洋,周 旭*,孙怡宁,刘 遥,马书芳
(1.中国科学技术大学自动化系,合肥 230026;2.中国科学院合肥智能机械研究所,合肥 230031)
基于步法的跑步机速度跟踪控制方法
刘 洋1,2,周 旭1,2*,孙怡宁2,刘 遥1,2,马书芳1,2
(1.中国科学技术大学自动化系,合肥 230026;2.中国科学院合肥智能机械研究所,合肥 230031)
目前,电动跑步机的加减速都是通过手动按钮控制,制约了健身者改变速度的自由性,对于电动跑步机应用拓展也产生了诸多不利影响。本文提出了一种基于步法的跑步机速度跟踪控制方法:通过在电动跑步机跑步带下安装压力传感器,获取运动时脚底与跑步机之间的作用力信号,分析运动时的步法信息,判别人体的运动趋势,据此控制电机加速或减速,使得跑步机速度随着人体运动速度的变化而改变。实验表明,该方法能够达到预期的速度跟踪效果,可为今后的进一步研发和电动跑步机技术升级提供有益参考。
跑步机;步法;速度跟踪;控制方法
走、跑是康复医学和运动健身领域最常见的有氧健身运动,也是促进健康最简捷、最有效、最科学的运动健身方式之一[1]。近年来,由于气候、环境、场地和生活方式等因素的影响,户外跑步健身变得越来越困难,用于室内健身的运动器材受到人们的普遍青睐。其中,跑步机最为普及。
跑步机分为机械式和电动式:前者以人力为动力,驱动跑步机运转,需要人体付出更大的蹬力,容易产生疲劳和运动损伤,目前逐渐被电动跑步机替代[2];后者以马达为动力,克服了机械式跑步机的缺点。但是,当前电动跑步机的速度调节依赖按键或者运动者的心率变化[3],导致运动者需要不断地被动变速,以适应跑步机,严重的限制了运动者的自由运动。因此,研究跑步机上人体运动和速度变化的规律,调节马达速度以适应人体运动速度变化,对于改善健身者的跑步体验、拓展跑步机的应用范围具有重要意义。
目前,国内外的一些研究对速度跟随方法进行了有益尝试:通过束缚在人体上的装置,实时检测人体位置,控制马达转速,将人体向既定位置带动[4-6]。这类方法存在一些瓶颈问题:①同样的位置偏差可能是由远及近引起,也可能是由近及远引起,极易引起误判;②马达会在脚触板的任意时刻变速,人体很难控制,易引起加减速震荡;③束缚在肢体上的位置检测装置影响人的正常运动。
本文提出了一种基于步法的速度跟踪控制方法:不在运动者身上安装任何测量装置,而是通过检测运动者运动时脚底与跑步机之间的作用力信号,实时进行步态分析,获取人的步法特征,判别运动人体的加、减速趋势,据此在下一步触地时刻调整伺服马达的转速,实现跑步机的速度跟随控制,可有效克服前述方法的不足。
1 系统结构与工作原理
系统总体结构如图1所示。改造传统电动跑步机,在跑带下方安装两块测力平台,检测脚底与跑步机之间的作用力(简化系统考虑,本文只检测Z向压力,测力平台尺寸:L=650 mm,N=50 mm,W=350 mm)。两块测力平台按图2所示安装。
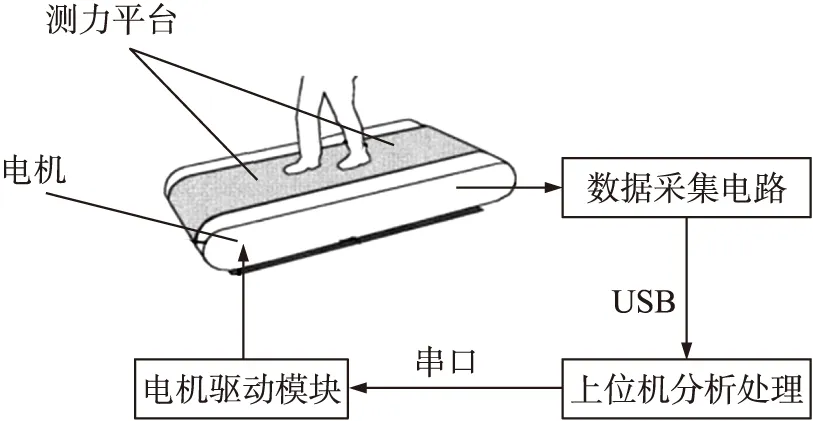
图1 系统总体结构

图2 两块测力平台安装示意图
数据采集电路将测力平台传感器感应的信号进行滤波、放大、A/D转换及数字滤波[7],经由USB接口传输至上位机。上位机根据实时数据进行分析处理、计算压力中心COP和实时速度,判别加、减速趋势,转换成马达速度指令,通过串口发送至马达控制器。
2 跑步机速度跟踪控制方法
2.1 速度跟踪控制基本原理
取两块测力平台的中心为坐标原点,定义Y+为走/跑的正前方向,X+为右手方向,Z为脚底正压力方向,如图3所示。
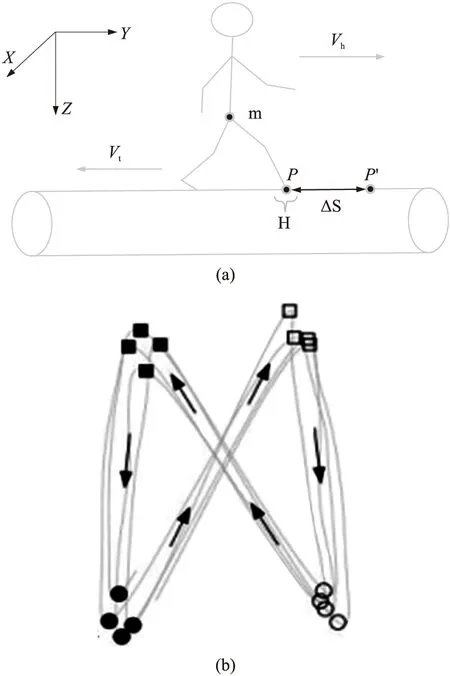
图3 跑步机上的运动模型
走/跑是周期性的动作,每个周期可分为失去平衡、恢复平衡两种阶段[8],为分析方便,本文将每个周期过程等效为匀(变)速过程。
如图3(a)所示,忽略左右脚的差异,设P、P′分别为每个周期开始、结束(也是下个周期的开始)时脚底压力中心COP位置,t为周期,Δs为P、P′的相对距离,a为每个周期内的等效加速度,Vt为跑步带的速度。
当人在单个周期内匀速运动,即等效加速度a=0时,人的速度为Vt,人的质心m的Y轴上的投影相对地面保持不变,其脚着地时产生的COP落在很小的范围H内,相邻两次的落点之间的相对距离Δs近似为0。
当人在单个周期内加速时,人相对于跑步带移动的距离大小为S1=Vtt+0.5at2,而跑步带相对地面移动距离大小为S2=Vtt,故人相对于地面移动的距离Δs=S1-S2=0.5at2,则在t时间内人的速度的变化为ΔV=at=2Δs/t。据此,提出了跑步机速度跟随控制的公式:
VP=VP′+KP2Δs/t
(1)
其中Kp为修正系数,范围为0~1.0。
2.2 步行或者跑步周期的划分
当正常人在跑步带上行走时,实际产生的压力中心COP如图3(b)所示,形如“蝴蝶”[9],FCL、FCR分别为左、右脚着地瞬间的压力中心点,FOL、FOR分别为左、右脚离地瞬间时的压力中心点,行走过程中存在双脚支撑阶段,即FCL→FOR或者FCR→FOL,产生交叉曲线。当人在跑步带上跑步时,出现双脚腾空阶段,双脚支撑阶段消失,交叉曲线消失,FOR、FOL分别为左、右脚着地瞬间的压力中心点,FCR、FCL分别为左、右脚离地瞬间的压力中心点,此时仅存在FOL→FCL(右脚)和FOR→FCR(左脚)两条曲线。
“走”的步态周期可划分为:左(右)脚离地→右(左)脚支撑→左(右)脚着地→双脚支撑→右(左)脚离地,“蝴蝶”曲线中FOL或FCR即为实际的P点(下一步为P′点)。“跑”的步态周期可划分为:左(右)脚着地→左(右)脚支撑→左(右)脚离地→腾空期→右(左)脚着地,“蝴蝶”曲线中FOL或FOR即为实际的P点(下一步为P′点)。P、P′的距离之差即为Δs值,两点的时间间隔即为t。
2.3 基于测力平台的变速特征提取
如图2所示,F(i,t)(i=1~8)表示传感器i在t时刻所采集到压力数值,则测力平台在t时刻所检测到的人运动产生的Z向垂直力为:

(2)
在t时刻,根据力矩平衡方程可知COP(X(t),Y(t)),其中:
(3)

(4)
因此,可获得人在跑步机上走、跑时,F(t)、X(t)、Y(t)的实时曲线,经过分析可以划分出步态周期中的各个阶段[10],人在跑步机上行走或者跑步时的P、P′位置分别如图4、图5所示。其中由于跑步时腾空期间的COP无法获知,本文将腾空前瞬间的COP值作为其值,并假设保持不变。
图4、图5显示测试结果与以往研究一致[11-14],验证了本文实验装置获取的信息是准确的。

图4 在跑步机上行走时,F(t)、X(t)与Y(t)的曲线图

图5 在跑步机上跑步时,F(t)、X(t)与Y(t)的曲线图
3 实验与结果分析
为了对本文提出的跑步机速度跟踪控制方法进行验证,在中科院合肥智能机械研究所运动与健康信息技术研究中心搭建了实验平台,如图6所示。

图6 实验平台
以一名男性测试者(24岁,174cm,60kg)为实验对象,该实验对象经过20min左右的学习适应后(取Kp=0.55),已经能够很好地在该系统上完成自主速度跟随实验。
图7、图8为变速过程中检测到的Δs、t曲线,图9为速度跟踪曲线,图10为速度匹配过程中的误差曲线。实验表明,运动人体变速时,引起单个周期内的相对移动距离和周期变化,根据式(1)可得到期望的速度,系统控制马达转速不断与之匹配,从而达到速度跟随的效果。

图7 运动过程中的Δs(mm)曲线图

图8 运动过程周期t(s)曲线图

图9 跑步机速度V/(Km/h)曲线

图10 误差曲线图
4 结束语
本文提出了一种基于步法的跑步机速度跟踪控制方法,不需要在运动者身上安装任何装置,只在脚着地的时刻控制伺服马达转速,跟随运动人体速度的变化趋势。实验结果表明,该方法可以在一定范围内实现跑步机速度的跟随控制,为进一步研究奠定了基础。
本文尚未使用目前跑步机市场上广泛采用的变频器,而采用伺服电机达到控制效果,且未考虑异常步态[15]、左右脚的步态差异性,这将是笔者下一步的研究重点。
[1] 郭峰.健身走跑在全民健身中运用的方法探索[J].安徽电子信息职业技术学院学报,2010,9(5):108-110.
[2]爱莲郎.跑步、健身与科学选择跑步机[J].文体用品与科技,2004(5):1-1.
[3]朱梁.健康监测跑步机的研发[D].浙江理工大学,2013.
[4]崔文琪,李峰.下肢康复机器人系统中的跑步机速度跟随自适应控制方法[J].现代制造工程,2013(9):30-34.
[5]Lichtenstein L,Barabbas J,Woods L R,et al.A Feedback-Controlled Interface for Treadmill Locomotion in Virtual Environments[J].ACM Transaction on Applied Perception,2007,4(1):1-22.
[6]Minetti A E,Boldrini L,Brusamolin L,et al.A Feedback-Controlled Treadmill(Treadmill-on-Demand)and the Spontaneous Speed of Walking and Running in Humans[J].Journal of Applied Physiology,2003,95(2):838-843.
[7]刘文静,王民慧,汪亚霖.强磁场下微弱信号检测系统的设计[J].传感技术学报,2013,26(6):865-870.
[8]钱竟光,宋雅伟,叶强.步行动作的生物力学原理及其步态分析[J].南京体育学院学报,2006,5(4):32-39.
[9]Roerdink,Melvyn,Coolen,et al.Online Gait Event Detection Using A Large Force Platform Embedded in A Treadmill[J].Journal of Biomechanics,2008,41(12):2628-2632.
[10]Verkerke G,Hof A,Zijlstra W,et al.Determining the Centre of Pressure During Walking and Running Using An Instrumented Treadmill[J].Journal of Biomechanics,2005,38(9):1881-1885.
[11]Cross R.Standing,Walking,Running,and Jumping on A Force Plate[J].American Journal of Physics,1999,67(4):304-309.
[12]Kram R,Griffin T M,Donelan J M,et al.Force Treadmill for Measuring Vertical and Horizontal Ground Reaction Forces[J].Journal of Applied Physiology,1998,85(2):764-769.
[13]Kluitenberg B,Bredeweg S W,Zijlstra S,et al.Comparison of Vertical Ground Reaction Forces During Overground and Treadmill Running A Validation Study[J].Research Quarterly for Exercise and Sport,2013,84(2):213-222.
[14]杨先军,李春丽,夏懿.电动跑步机上步态特征获取系统的设计[J].传感技术学报,2012,25(6):751-755.
[15]李世明,石凤莉.不同走步姿态的运动生物力学对比分析[J].天津体育学院学报,2007,22(6):504-508.
Method of Treadmill Speed-Tracking Control Based on Human Pace
LIUYang1,2,ZHOUXu1,2*,SUNYining2,LIUYao1,2,MAShufang1,2
(1.Department of Automation of University of Science and Technology of China,Hefei 230026,China;2.Institute of Intelligent Machines,Chinese Academy of Science,Hefei 230031,China)
At present,the speed of electric treadmill is controlled by manual button,which limits the freedom of changing the speed and also produces negative influence on expanding applications of the electric treadmill.This paper proposes a method of speed-tracking control of electric treadmill which is based on human pace.By mounting force sensors under the treadmill belt,the method can obtain the force signal of foot when taking exercises on the treadmill,and the information of human pace can be acquired by analyzing the signal.It can tell the trend of the movement and send the command to drive motor at the same time.Thus,the speed of the electric treadmill changes as the speed of the human changes.The experimental results show that this control algorithm can reach a satisfying effect on speed-tracking control,and also provides reference for the further research and technology upgrading of electric treadmill.
treadmill;pace;speed-tracking;control strategy

刘 洋(1991-),男,硕士研究生,主要研究方向为人体运动行为感知技术,798285127@qq.com;

周 旭(1975-),男,硕士生导师,安徽枞阳人,研究方向为HMI信息获取方法与测试装置、智能康体装备、人体运动行为感知技术、自动控制及嵌入式系统等,xzhou@iim.ac.cn。
2014-09-09 修改日期:2014-11-19
C:7210A
10.3969/j.issn.1004-1699.2015.02.012
TP275;TP274.2
A
1004-1699(2015)02-0217-04
