锻造操作机大车行走液压控制系统仿真研究
2015-05-05郭加宁邓子龙韦丽娃
郭加宁,邓子龙,韦丽娃
(辽宁石油化工大学机械工程学院,辽宁 抚顺113001)
0 引言
锻造操作机是辅助锻造作业的重要设备,具备瞬时响应速度快、定位精度高、工作稳定、抗干扰能力强和缓冲性能良好等优点。由于液压传动具有瞬时响应速度快、可实现无级调速、输出功率大易于实现自动化和过载保护等优点,所以操作机一般采用液压传动[1]。锻造操作机主要任务是夹持锻件辅助压机进行锻造,而操作机大车行走系统用于完成轴向进给。决定锻件质量的主要因素是操作机大车行走系统的定位精度。以20MN锻造操作机大车行走液压控制系统为研究对象,利用AMESim软件进行建模仿真[2],分析了空载和额定负载时操作机大车行走液压系统的动态特性,为操作机大车行走液压控制系统的改造提供理论基础。
1 操作机大车行走液压系统工作原理
20MN锻造液压机的操作机是全液压操作机。操作机大车行走机构主要由传动链轨、链轮、传动链和变速机构等组成,采用机械传动液压驱动的方式。液压马达的主要功能是完成操作机大车的运动和定位,同时缓冲大车启停引起的液压冲击[3]。
操作机大车行走液压系统的原理图如图1所示。前后两组链轮组成操作机车体行走部分,位于车体后部的是主动轮链轮,采用1组双液压马达分别在大车两侧同步驱动,左右2个对称的电液比例控制系统分别控制液压马达的旋转方向、速度和角度来满足操作机大车行走的工艺要求[4]。2个阀控马达系统由同一油源供油,因此系统中油液的流量和压力基本相同。电液比例方向阀通过不同的得电情况控制大车2个马达正转和反转,通过减速器将液压马达输出的转矩传递到驱动大车行走的链轮上,链轮在轨道上运动,将圆周运动转化为操作机的直线运动[5]。
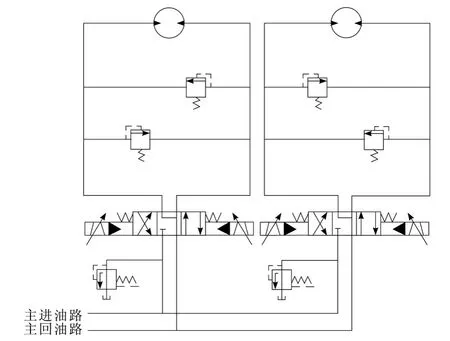
图1 操作机大车行走液压系统原理
2 操作机大车行走液压系统建模仿真
AMESim/Sketch模式下,选择所需元件建立系统的仿真模型。系统仿真模型的每个元件都有一个与之对应的数学模型,AMESim为每个元件库都提供了若干个子模型。子模型太复杂会增加系统的求解难度,而子模型太简单又会导致系统分析结果失真,不能真实的反映系统的动态特性,因此根据实际系统的工作原理以及分析内容搭建操作机大车行走系统仿真模型[6]。通常操作机大车行走系统是由检测元件、液压控制元件和工控机组成的闭环位置控制系统。通过对系统进行简化后,得到操作机大车行走系统的仿真模型如图2所示。操作机大车行走系统主要由液压马达、电液比例阀、减速箱、齿轮齿条、位移传感器和负载等组成。外负载的位置传感器检测并反馈位置信号,与工控机给定位置信号进行比较,大车行走系统的位置控制通过PID控制器来实现。
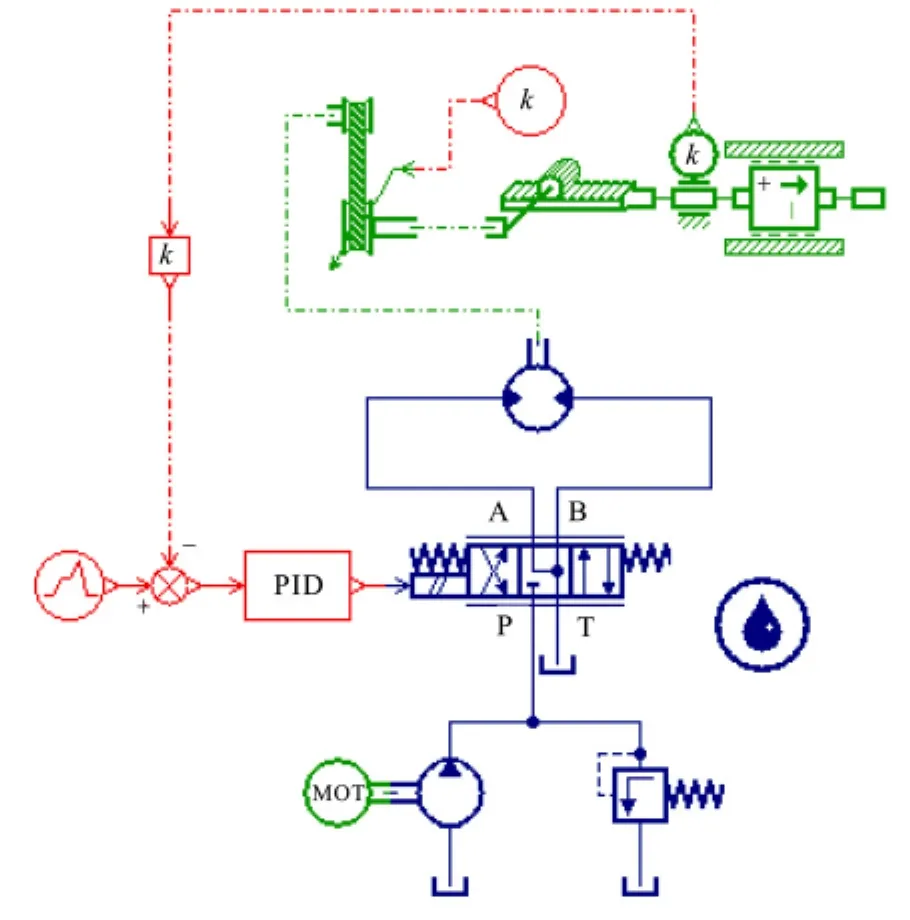
图2 操作机大车行走系统仿真模型
在AMESim/Parameter参数模式下,设置操作机大车行走系统仿真模型的主要参数如表1所示。
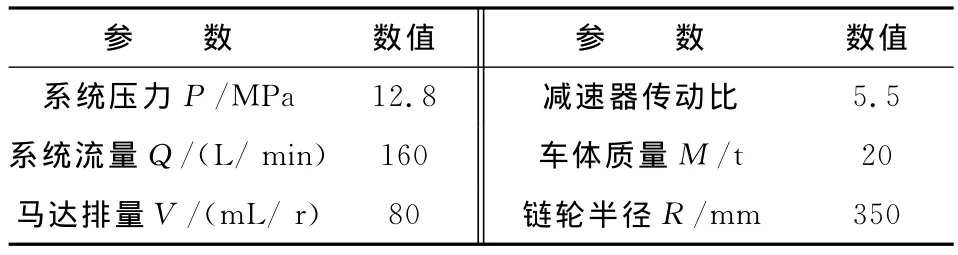
表1 大车行走系统仿真模型的参数设置表
3 仿真结果与分析
实际生产过程中,要求操作机和锻造主机能实现联动送进操作和自动控制。在主机完成一个锻造行程后,操作机在主机的指令下完成下一次锻造的轴向送进操作。只有锻造操作机在自动锻造和联动锻造的过程中具有较高的位置控制精度,才能保证锻件的尺寸精度,操作机的轴向自动送进误差的范围为10%[7]。
系统的基本模式是常锻操作模式,设定大车行走系统的单位阶跃信号值为0.05,即要求操作机大车行走0.05m,设定仿真时间为2.5s,采样周期为0.01s。在空载和额定负载工况下,运行仿真系统分别得到系统的动态特性曲线如图3所示。
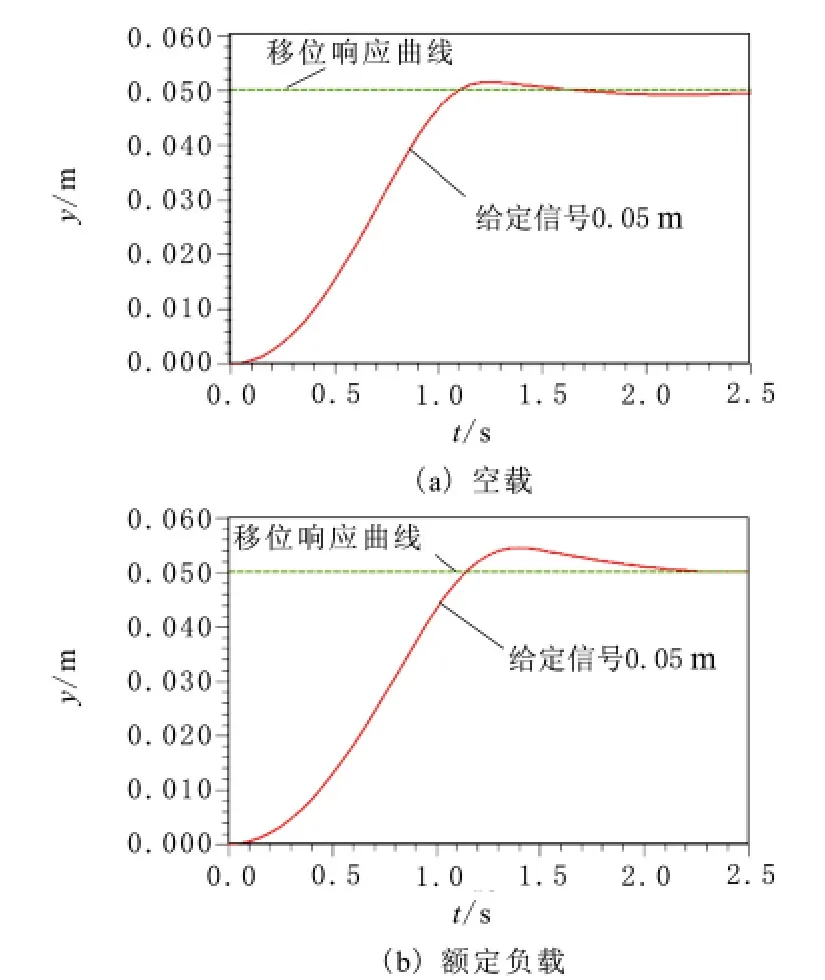
图3 操作机大车行走0.05m时系统的动态特性曲线
通过图3可以得出 ,系统在两种工况下的最大的超调量都控制在10%范围内。在空载工况下,系统需要大约0.6s的上升时间,系统的稳定时间接近1.6s;在额定负载工况下,系统需要大约0.7s的上升时间,系统的稳定时间接近2.2s,明显多于空载时所需的时间。这是由于额定负载时,系统具有较大的惯性,系统的启动加速度比较小,导致操作机大车行走系统瞬时响应速度下降。通过调节PID控制器的控制参数,可以迅速提高系统的瞬时响应速度,同时系统的超调量随之增大。对于操作机大车行走液压系统来说,电液比例方向阀频繁换向,在换向过程中液压系统内部会产生较大的冲击,较大的冲击会损坏关键液压元件,从而影响系统的正常运行。综合以上分析操作机大车行走系统在空载和额定负载的工况下,系统需要1.6~2.2s达到稳定,满足锻造次数为20次/min的使用要求。
4 结束语
通过对20MN锻造操作机大车行走系统分别在空载和额定负载工况下瞬态响应的研究分析,得出操作机大车行走系统在空载和额定负载工况下进给0.05m时,系统需要1.6~2.2s达到稳定,满足10mm的锻造要求。
[1] 周斌,李阁强,江兵,等.20t锻造操作机大车行走液压控制系统设计[J].液压与气动,2014(6):92-93.
[2] 付永领,祁小野.AMESim建模与仿真[M].北京:北京航空航天大学出版社,2006.
[3] 傅新,徐明,王伟,等.锻造操作机液压系统设计与仿真[J].机械工程学报,2010(11):49-53.
[4] 陈柏金,徐明昊,张红颖.液压锻造操作机大车行走机构的位置控制系统[J].华中科技大学学报(自然科学版),2011,39(8):6-8.
[5] 刘杰.基于虚拟样机的锻造操作机阀控马达系统仿真研究[D].秦皇岛:燕山大学,2010.
[6] 翟富刚,孔祥东,姚静,等.锻造操作机夹钳回转系统动态特性仿真研究[J].液压与气动,2010(3):61-63.
[7] 孔祥东,刘杰,翟富刚,等.基于AMESim的锻造操作机大车行走液压控制系统仿真研究[J].机床与液压,2010(13):128-129.