一种下肢外骨骼康复机器人优化的结构设计与控制仿真分析
2015-05-05张玉叶张小栋石强勇
张玉叶,张小栋,江 城,王 贺,石强勇
(1.咸阳师范学院物理与电子工程学院,陕西 咸阳712000;2.西安交通大学机械与电子工程学院,陕西 西安710049)
0 引言
康复医学理论和临床治疗证明,对患者进行由简单到复杂,由协助到监护,直至患者能够生活自理的康复训练有非常重要的意义[1]。基于康复机器人社会需求和科学价值,开发一款下肢外骨骼康复机器人,其结构设计已完成论证,结构设计简洁,自适应性强,已申请发明专利。在结构设计基础上,参考文献[2-3],对康复机器人的运动学以及动力学建模进行了研究,参考文献[4],对下肢外骨骼康复机器人的自适应控制方法进行了研究,并进行二自由度仿真,为课题的深入研究打下基础。
1 下肢外骨骼康复机器人机械结构设计及运动学关系
设计的康复机器人总体结构如图1所示,采用曲柄滑块机构驱动关节旋转,电机采用混合式丝杆电机,最大推力为800N,简化了设计结构,膝关节平均驱动力矩为40N·m,髋关节平均驱动力矩为50N·m。电机通过联轴器带动滚珠丝杠转动,从而带动固定于丝杠螺母上的髋关节滑块移动,滑块移动带动髋关节推杆运动使得大腿杆摆动,实现关节角度规律变化。本文中轨迹控制的输入量是关节角度,以髋关节为例其运动学关系几何简图如图2所示,图中标注的尺寸单位为mm,定义大腿和小腿相对于水平地面垂直的位置为下肢外骨骼的控制零位,大腿相对于零位向前摆动为正角度,向后摆动为负角度;膝关节相对于零位向后摆动为正角度;以髋关节为研究对象,则根据髋关节运动学关系几何图形得髋关节滑块运动学关系为:

图1 助行下肢外骨骼康
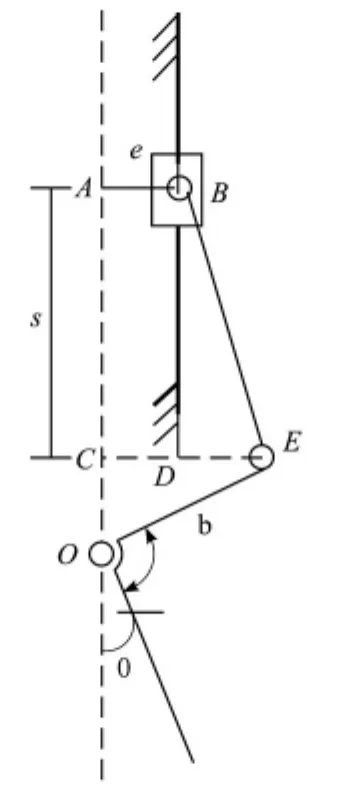
图2 髋关节运动学关系

1.1 髋关节外展/内收运动关节设计
髋关节外展/内收运动关节有2种工作模式,在康复训练初期,由于病人无主动力,因此将外展/内收关节锁死,使动力外骨骼只能在矢状面内运动;当病人恢复一定的运动能力后,外展/内收关节改为由压力可调弹簧压缩缸支撑的被动运动关节,在病人主动参与下动力外骨骼完成在三维空间运动,髋关节的外展/内收运动关节如图3所示。

图3 髋关节外展/内收运动关节
1.2 骨盆设计
相关研究表明,骨盆的旋转、倾斜、横向移动对于正常步态的实现是非常重要的。其中,骨盆横向移动对于实现在正常步态过程中身体重心的转移非常重要。因此,综合考虑了结构设计的复杂度与功能性,在骨盆支撑结构中设计了主动式骨盆横向移动机构。横向运动范围为±40cm,正常步态在±30 cm之内。滚珠丝杆传动副均采用台湾TBI滚珠丝杆,型号为DFS01610-2.8,支撑座型号型号为BK10(固定侧),BF10(支撑侧),线性导轨型号为BCH20A。
1.3 自适应支撑减重(BWS)系统设计
脑卒中患者一般情况下不能够正常站立支撑自身体重,为了达到在减重步行训练中实现自主控制的减重支撑的目的,设计了一种减重支撑系统,该减重支撑系统由槽型凸轮和弹簧组成。调查研究显示,不同个体之间的人在一个步态周期内身体的重心轨迹差别不大,仅存在细小差别。可以得到身体的重心轨迹函数曲线,如图4所示。用此拟合曲线作为数控铣床上槽形凸轮的函数曲线输入,就得到重心轨迹曲线的Z轴数据,该数据决定了轨迹曲线的差别范围,进而也确定了弹性模式和弹簧的弹性形变。在硬件选材上,滚珠丝杆传动副选型为均采用台湾TBI,滚珠丝杆型号为DFS01610-2.8,支撑座型号为BK10(固定侧),BF10(支撑侧),线性导轨型号为BCH20A。人体在一个步态周期内,重心轨迹Z方向的数据变化为:

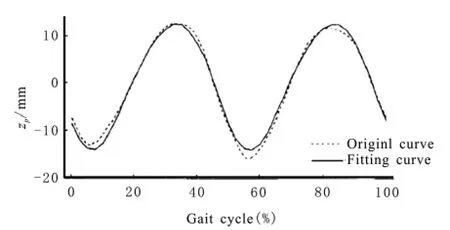
图4 步态周期内重心轨迹
2 下肢外骨骼康复机器人康复策略
2.1 运动控制
康复训练模式分为被动模式、助力模式、主动模式和抗阻模式[2]。被动模式下,肌力丧失,完全由机械腿带动人腿进行康复运动,康复训练机器人(机械腿)要提供足够的力进行被动训练;助力模式下,当肌力有一定的恢复,但患者又不能完全进行步态训练,需要借助机械腿助力;主动模式下,两腿能够进行基本步态训练,此时机械腿和人腿之间维持很小的作用力以保持机械腿对人腿的跟随运动;抗阻模式下,主要是提供一定量的与腿运动方向相反的力以达到对肌肉的强化训练。位置控制原理框图如图5所示,着力于被动模式下的运动控制探讨,以延伸到其他模式下运动控制的实现[3-4]。

图5 位置控制原理
2.2 被动屈伸训练控制策略
被动屈伸训练阶段通过控制电机,使得电机驱动负载而获得要求的机构转动。由于对机械腿的控制是基于位置的控制[5],此策略在训练开始前便选择好要进行的运动轨迹曲线数据,待训练开始后,按照一定的规则进行数据转换,最后转换成可以控制伺服电机的脉冲信号,外骨骼机器人按照不断存储轨迹数据,显示实时传递回来的关节位置、速度等数据。让电机在不同的时刻转动对应的角度。
选用电机编码器分辨率10 000,记作F,单位为脉冲(pulse),而电机每转一圈所需脉冲数是f,单位为脉冲(pulse),单坐标平台用的滚珠丝杠螺距5 mm。为了确定位置伺服控制模式下电机的脉冲当量δp,即每一个电脉冲负载产生的直线位移量,必须先设定驱动器的参数为Pr48(第1指令脉冲分倍频分子),Pr4A(指令脉冲分倍频分子倍率),pr4B(指令脉分倍频分母),那么指令脉冲分倍频的分子Pr48、分子倍率Pr4A和分母Pr4B必须满足[6]:

机器人设置f=5 000,即5 000个脉冲驱动电机转一圈,系统中设定Pr48=10 000、Pr4A=0、Pr4B=5 000。关节的传动方式采用滚珠丝杠直接传动,滚轴丝杠导程为5mm,运动控制卡每发出5 000个脉冲驱动电机转一圈,也就是驱动滚珠丝杠滑块移动5mm。可换算成如果运动控制卡每发出一个脉冲,滑块移动1μm,那么电机位置脉冲量与滑块位移量的关系为:

以髋关节为例介绍控制方法。髋关节摆动角度与髋关节滑块位移量关系如图2。选择参数,参考采样定理,选择采样点,可以计算出髋关节一个摆动周期内滑块每个位置的位移量Lh和速度vh。同理也可以得到膝关节一个摆动周期内滑块每个位置的位移量和速度[6]。
3 下肢外骨骼康复机器人控制器设计及稳定性分析
外骨骼机器人大腿杆长度为l1,与竖直垂线之间的夹角为髋关节角θh,小腿杆长度为l2,与大腿杆延长线的夹角为膝关节角θk。根据以上下肢外骨骼康复机器人系统的物理模型,可为其建立完整的拉格朗日动力学方程为[7]:

下肢外骨骼康复机器人系统的标称动力学模型为:

根据参考文献[8-9]中的计算力矩控制设计方法,则系统的标称输入力矩和输入加速度矢量分别为:


因此,外骨骼康复机器人系统的标称力矩输入为:

由式(1)和式(6)得误差方程:

这是基于机器人标称模型的前馈加反馈控制,前馈的作用在于抵消各关节的耦合,反馈的作用在于补偿跟踪偏差。式(10)表明如果选择合适的反馈增益KD,KP,轨迹误差可渐进稳定收敛于0。
4 仿真分析
先对已经测的人体步态数据进行拟合,把下肢步态运动的髋关节曲线数据输入到 Matlab中,利用 Matlab自带的f(x,y,n)=polyfit(t,y,n)多项式拟合函数对步态数据进行多项式拟合,得到拟合的多项式公式表达式。这些曲线可以做为下肢康复机器人控制系统中被动康复策略的控制数据[10]。通过所述控制算法控制下肢康复机器人的各个关节跟踪相对应的关节曲线就能实现机器人的正常步态行走康复训练。

图6 膝关节转角轨迹

图7 髋关节转角轨迹
仿真结果如图6、图7所示,虚线所表示的曲线为实际轨迹曲线,点划线所表示的曲线为期望的轨迹曲线,从图6、图7对比可以看到,实际轨迹能够快速跟踪期望轨迹,开始时小幅度地跟随曲线趋势的变化,存在的位置误差被控制在人体关节运动的安全范围内,并且保证指数意义下渐近稳定、全局收敛一致有界,验证了控制模型的正确性。
5 结束语
以开发的下肢外骨骼康复机器人为研究对象,从工程实际出发,进行结构设计,着重介绍了其自适应支撑减重装置,在此基础上,针对下肢外骨骼康复机器人动力学模型的非线性特点,采用了基于标称模型计算力矩控制器,通过采样,采用有偏差跟踪的控制方法,对其进行了仿真。仿真结果显示所采用的控制策略在跟踪精度上有优势,为下一步工作的展开提供了方向。
[1] 王广志,任宇鹏,季林红,等.机器人辅助运动神经康复的研究现状[J].机器人技术与应用,2004(4):9-14.
[2] 方郁.可穿戴下肢助力机器人动力学建模及其控制研究[D].合肥:中国科学技术大学,2009.
[3] 程卫卫.下肢行走康复训练机器人整体机构设计及运动分析[D].郑州:河南科技大学,2011.
[4] 陈贵亮,李长鹏,刘更谦.下肢外骨骼康复机器人的自适应控制研究[J].制造业自动化,2012(34):5-7.
[5] Hornby T G,Zemon D H,Campbell D.Robotic-assisted body-weight-supported treadmill training in individuals following motor incomplete spinal cord injury[J].Phys Ther,2005,85(1):52-66.
[6] 周一新,蒋毅,张洪,等.胫骨轴向旋转运动与膝关节屈伸运动耦合的研究[J].中华骨科杂志,2004(12):747-750.
[7] 张立勋,颜庆,杨勇,等.下肢康复训练机器人AVR单片机控制系统[J].机械与电子,2004(10):52-55.
[8] 尤跃东,殷跃红.下肢外骨骼机器人运动学分析与轨迹控制实现[J].机械与电子,2012(10):65-67.
[9] Markicwica B R.Analysis of the computed-torque drive method and computer-controlled manipulator.Technology Memo[R].Jet Propulsion Lab,Pasadena,CA,1973.
[10] 陈乐,胡良谋.滞后校正在电液伺服控制系统中的应用与仿真[J].机床与液压,2005(2):114-115.