一种光栅条纹图像非线性矫正算法的DSP实现
2015-05-03孔小丽王召巴
孔小丽,金 永,王召巴
(中北大学 电子测试技术国家重点实验室,山西 太原 030051)
0 引 言
投影栅线法是结构光学测量技术的重要分支,直接利用被调制条纹的相位畸变信息就可以得到物体表面高度的信息。投影栅线法将余弦光栅投影到玻璃表面,利用玻璃缺陷会导致云纹变形来实现检测[1-3]。在玻璃缺陷检测过程中,LED光源导致产生不一致的光栅云纹图像。在非线性矫正算法中,“逐行”矫正算法具有计算量小,矫正精度高,处理时间较快、实用性强等优点;“曲线拟合”法有更高的矫正精度和动态范围,有更好的实用前景。
随着玻璃缺陷检测系统不断追求小型化、高成像质量,以及嵌入式和集成电路技术的发展,对图像处理软件的要求也越来越高。数字信号处理(DSP)技术拥有特有的稳定性、可重复性、强大的数据处理能力,因此将引入到玻璃缺陷检测系统中,以实现玻璃缺陷检测系统的小型实时化[4-5]。本文介绍了一种以TMS3206437为核心,用于“曲线拟合”矫正算法的玻璃条纹图像实时处理系统。
1 图像矫正
理想状态下,在玻璃缺陷检测系统中,各图像处理和采集单元之间采用并行处理,每路分别独立地实现玻璃表面条纹图像的采集和处理。在采集的玻璃条纹图像中,同一列的无缺陷条纹图像的灰度值一致,光栅云纹在空域上表现为周期的正弦函数,同一行的条纹曲线的灰度值呈余弦分布。由于LED光源的光强不一致以及CCD相机、投影仪图像采集卡自身参数影响,导致线阵CCD相机采集的条纹曲线的背景灰度和对比度发生变化,同一行的条纹曲线并不是理想的余弦分布;并且这种变化的频率较低,使得频域内背景灰度的频谱发生扩展,造成条纹的频率与背景灰度的频率混叠,无法准确地提取出条纹的频率。因此,需要对图像进行逐行矫正处理,以消除频谱图中高级次的谱点干扰。
玻璃表面的条纹图像可表示为

其中:(x,y)——条纹图像上任意像素的坐标,x=1,…,5 150,y=1,…,200N;
I(x,y)——条纹图像的灰度值;
f0=1/p——条纹的频率;
p——透射光栅的栅距;
a(x,y)——背景灰度分布;
b(x,y)——条纹的幅值;
b(x,y)/a(x,y)——条纹对比度;
ψ(x,y)——条纹相位。
本文在玻璃表面上形成的条纹周期为10个像素,所选取的光栅栅距p=1mm,因此条纹曲线的频率f0=0.1。理想情况下,条纹图像中同一行的灰度分布应为理想的余弦曲线,即 a(x,y)、b(x,y)和 ψ(x,y)均为常数,设 a(x,y)=A、b(x,y)=B 和 ψ(x,y)=0,则一条理想的条纹曲线I′(x)可表示为

参数A和B的确定方法为:检测开始前,采集200行无缺陷条纹图像,按照下式求得一条均值条纹曲线I″(x):


2 系统硬件设计
玻璃条纹图像处理系统以TMS320DM6437为核心进行构建,结构如图1[6-8]所示。
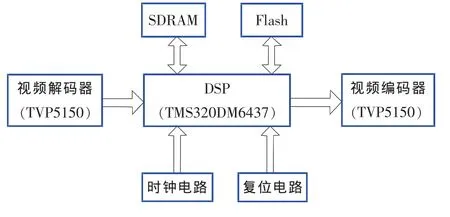
图1 玻璃条纹图像处理系统结构框图
系统接收模拟PAL制玻璃条纹信号视频输入,解码成为数字图像信号。视频解码芯片采用TVP5l50PBS,与DM6437的S-Video相连,它将模拟PAL制视频信号转换成YCbCr为4∶2∶2的BT.656数字视频格式[9]。在DM6437中,采用“曲线拟合”校正算法对玻璃条纹图像数据进行非均匀性校正处理,将校正后的图像数据输出到DM6437的VGA视频口。S-Video工作在display模式,与视频编码芯片相连。视频编码芯片采用SAA7121,它可以将符合BT.656格式的数字视频信号直接转换成PAL制或者NTSC格式的模拟视频信号,系统输出的视频信号格式为PAL标准模拟信号。数字图像数据经过编码器编码后,生成PAL制的复合视频信号,通过显示器显示出来[10]。
由于TMS320DM6437的内部SRAM容量只有64K×16位,需要设计外部存储器用于存储图像数据。DDR芯片容量为2048Mb。Flash芯片数据宽度为8位,容量为32Mb,用于存放校正参数和程序代码[11]。
3 系统软件设计
玻璃条纹图像处理系统的软件流程如图2所示。程序中,DM6437以非连续帧模式进行图像采集和显示。DM6437视频处理子系统(VPSS)包括了视频处理前端(VPFE)和视频处理后端(VPBE),独立于DSP内核工作,分别用于外部图像输入设备和视频输出设备。VPFE采集完1帧图像后,通知DSP内核进行处理并同时继续下1帧的采集。在下1帧采集完成之前,DSP完成“曲线拟合”校正处理,将数据放入显示缓冲区,并启动EDMA将缓冲区中的数据搬移至VPBE显示。

图2 应用程序流程图
通过设置相关寄存器的值,DM6437的EMIF(外部存储器接口)可以和各种类型的存储器芯片相连。
相关寄存器的设置值如表1和表2所示。
DM6437的VPFE配置为8位BT.656视频数据的Capture模式,用于采集图像数据。VPBE则配置为Display模式,将图像数据组合成8位BT.656视频数据流,输出给视频编码器。
4 实验及结果
以TMS320DM6437为核心的玻璃条纹图像矫正处理系统,实现了“曲线拟合”非线性矫正算法。选取玻璃生产过程中具有代表性的4种典型缺陷,包括夹杂缺陷、气泡缺陷、划伤缺陷以及光学变形缺陷中的疖瘤缺陷,进行实时矫正,对比图如图3~图6所示。

表l DDR相关寄存器的设置值

表2 Flash控制寄存器设置值
对比图3、图4、图5可以看出,经过矫正的玻璃条纹图像的背景灰度和幅值趋于一致,降低了光强不一致所引起的频谱混叠。从图中可以看出,使用“曲线拟合”法校正后的图像,边缘更加清晰,背景更加均匀。

图3 气泡缺陷校正前后图像对比

图4 划伤缺陷校正前后图像对比

图5 疖瘤缺陷校正前后图像对比

图6 夹杂缺陷校正前后图像对比

表3 两种方法处理时间对比 ms
此外,文中在32位,3.4GHz Intel处理器,4.0GB内存的计算机上选用Matlab 2012b进行DSP与传统软件处理时间的对比实验,结果如表3所示。由表可知,DSP处理方法的处理时间明显比软件处理的处理时间短,通过与软件求解算法相比,该系统可很大程度上提高条纹图像的矫正处理速度。
5 结束语
非线性矫正技术是玻璃缺陷检测的关键技术之一。文中以TMS320DM6437为核心构建了玻璃条纹图像处理系统,并实现了“曲线拟合”矫正算法。实验结果表明,该算法的矫正效果较好,可以使矫正后的图像,边缘更加清晰,背景更加均匀,并且计算量小,满足实时性要求。与软件求解算法相比,该系统可以在保证检测准确度的同时,很大程度上提高条纹图像的矫正处理速度。
[1]石兵华,金永,王召巴.基于数字光栅投影的浮法玻璃缺陷检测方法研究[J].光电子·激光,2014(3):521-525.
[2]韩仲卿,杨圣.基于同心圆光栅的远心三维测量系统[J].应用光学,2012,33(5):920-925.
[3]郭文静,石兵华,金永.关于提高傅里叶变换轮廓术测量精度的研究[J].应用光学,2013,34(5):845-848.
[4]黄竹邻,柳刚,何兆湘,等.基于TMS320C6711 DSP的红外热成像非均匀性校正技术[J].光电子技术与信息,2005,18(3):80-84.
[5]胡斌强,苏绍,王跃科.基于DSP的周期信号等效采样系统设计与实现[J].计算机测量与控制,2006,14(11):1557-1559.
[6]陈志华,张洪涛,陈坤.基于TI DSP的红外图像采集预处理系统的软硬件实现[J].红外,2006,27(7):16-19.
[7]张洪涛,陈志华.基于TIDSP的红外图像采集系统硬件设计[J].湖北工业大学学报,2006,21(5):32-34.
[8]张彦铎,陈驰,于宝成.高速图像采集系统的研制[J].武汉工程大学报,2013,35(5):67-71.
[9]李武森,迟泽英,陈文建.高速DSP图像处理系统的模拟视频输入接口设计[J].南京理工大学学报,2003,1(27):102-105.
[10]代少升,袁祥辉.提高DSP图像处理系统实时性的一种有效方法[J].光学精密工程,2003,11(6):617-620.
[11]TMS320C6000 CPU and Instruction Set Reference Guide[M].San Francisco:Texas Instruments Incorporated,October 2000.
