三桩定位反铲挖泥船载荷分析研究
2015-05-03季湘岚陈新权
季湘岚,杨 启,陈新权
(上海交通大学 a.船舶海洋与建筑工程学院;b.海洋工程国家重点实验室,上海 200240)
三桩定位反铲挖泥船载荷分析研究
季湘岚a,杨 启b,陈新权b
(上海交通大学 a.船舶海洋与建筑工程学院;b.海洋工程国家重点实验室,上海 200240)
鉴于目前还没有系统的反铲挖泥船载荷计算的模型和方法,结合三桩定位反铲挖泥船的作业特点,分析三桩定位的反铲挖泥船环境载荷和作业载荷计算方法,建立在环境载荷和工作载荷共同作用下挖泥船三根钢桩的载荷计算模型,为反铲挖泥船设计制造提供载荷计算方法。
反铲挖泥船;钢桩;载荷分析
反铲挖泥船通过三桩定位完成作业。作业时3根定位桩提升船体部分,使3个定位桩产生一定的对地压力以克服挖掘反力和波浪等作用力。[1]船体提升的高度根据反铲机的切削力和波浪情况而定。3根桩插入水底,并受到6个自由度方向的受力,是一个复杂的超静定问题。在挖掘过程中,挖掘机动臂左右旋转以便挖掘更大的面积,同时船体受潮汐和波浪变化影响,吃水和浮力都在不断变化,因此钢桩的受力也在不断变化。
目前,国内对于钢桩台车的自主研发相对薄弱[2],世界上研究反铲挖泥船桩受力特点的人很少,尚没有查到一种完整地给出反铲船桩受力计算的模型。工程应用中常假设在挖掘过程中有向上拔起趋势的临界状态钢桩受力为零来计算[3]。文中将研究反铲挖泥船外载荷计算模型,建立一套完整的反铲挖泥船在环境和作业外载荷作用下船舶和定位桩载荷计算分析模型。
1 坐标系的建立
为了分析船舶和定位钢桩的载荷情况,建立如下坐标系,以船舶几何中心为原点,沿船长方向为x轴,正方向指向船艏;沿船宽方向为y轴,正方向指向左舷;竖直方向为z轴,正方向竖直向上,见图1。力的方向以受力图中的方向为正方向,计算值为负则表示相反。

图1 坐标系的建立
2 船舶环境外载荷分析
船舶在沿海作业施工时收到风浪流环境条件的作用,其风浪流的计算模型如下。
2.1 风载荷
风载荷的影响相对较小,采用API RP 2A-WSD[4]推荐的系数法估算风载荷F。
F=(ρ/2)V2CSA
(1)
式中:ρ——空气密度,取0.001 226t/m3;
V——风速,m/s;
CS——形状系数
A——物体面积。
2.2 波浪载荷
波浪载荷可以使用ANSYS软件中的AQWA模块进行数值计算[5-6],或者采用其他软件进行模拟。由于船体的对称性,可以取0°、45°、90°、135°、180° 5个浪向进行计算。
2.3 流载荷
采用系数法估算流载荷[7],系数见表1。
(2)

表1 流载荷系数表
3 反铲挖泥船定位桩腿载荷分析
反铲挖泥船定位桩腿在工作时受到工作载荷(挖掘机反力)、环境载荷(风、浪、流)和抬船对钢桩产生的压力3部分载荷作用。工作载荷即挖掘产生的载荷直接通过硬钢臂传递给船体,并通过船体传递给定位桩腿,环境载荷由船体传递给定位钢桩,抬船载荷通过定位桩腿抬船机构直接作用在桩腿上[8-9]。
3.1 工作载荷对定位桩腿的作用力分析
挖掘机臂旋转过的角度设为α,挖掘所受切削反力F与竖直方向的角度设为θ,见图2。F是空间中的力,其中竖直分量引起钢桩压力变化,而水平分量引起钢桩弯矩变化。[10]

图2 切削力示意
挖掘力引起钢桩压力变化的计算模型如下。
(3)
式中:FA1、FB1、FC1——挖掘机反力的垂直分量产生在A、B、C3桩的压力;
F——挖掘机反力;
l1——铲斗距挖掘机座中心距离,见图3;
l2——挖掘机座中心距B、C桩的水平距离;
l3——B、C桩距船舶重心的水平距离;
l4——船舶重心距A桩的水平距离;
α——挖掘机臂旋转过的角度;
θ——切削反力F与垂直方向的角度;
b——B、C桩距中纵剖面的距离。
由式(3)得

图3 切削力竖直分量受力分析
反铲挖掘时,反铲挖机载荷作用在E点,与纵向夹角α。载荷传递到船体上可以分解成x和y方向上载荷,得到F′和F″,见图4。
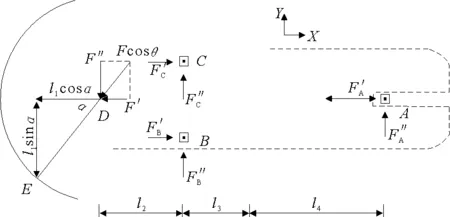
图4 切削力水平分量受力分析

2)y方向上载荷可按下式计算。B、C点较近,假设F″B=F″C,则挖掘机反力引起钢桩弯矩变化的计算模型为
(4)
由式(4)得
挖机水平分力作用在钢桩产生的弯矩可以按下面模型计算求得
(5)
式中:MA1、MB1、MC1——挖掘机反力的水平分量产生在A、B、C 3桩底的弯矩;
Hd——挖掘深度,见图5a);
H——作业水深,见图5b)。
3.2 船舶环境外载荷对定位桩腿作用力分析
船舶受到环境外力通过船与定位桩的链接装置传递给定位桩。环境载荷包括风浪流3个部分,三者合成后可以得出船舶6个自由度上对船体重心的力或力矩:Fx、Fy、Fz、Mx、My、Mz,见图5。以下分别求出6个方向力或力矩对钢桩产生的作用。

图5 反铲挖泥船受力分析
通过分析各种外载荷对桩腿的作用方式,分别建立在各种载荷作用下3个定位桩腿的计算方法,计算模型见表2。
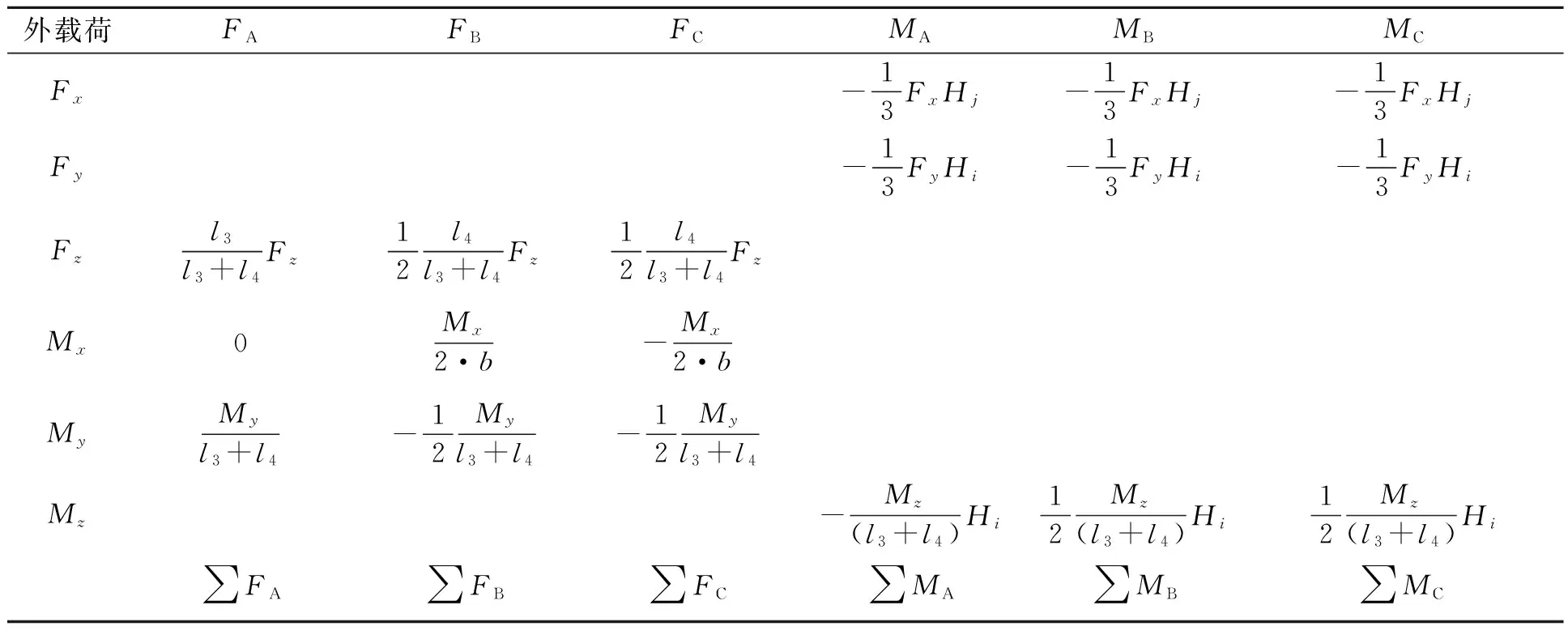
表2 环境载荷引起定位桩载荷计算方法汇总表
表中:Fx,Fy,Fz,Mx——x、y、z、Rx方向的环境载荷;
Fy,Fz——Ry、Rz方向的环境载荷;
FA,FE,FC——3个桩的垂向载荷;
MA,MS,MC——3桩腿底部的弯矩;
H——作业水深;
l3——船舶几何重心距船艏B、C定位桩的纵向距离;
l4——船舶几何重心距船艉A定位桩的纵向距离。
3.3 抬船对桩腿作用力分析
反铲挖泥船作业时由于设备特点,需要把船体上抬一定高度,抬船的高度决定了船舶安全和作业的稳定性。抬船太高,可以克服正常作业下的载荷,但增加了抬船装置的提升能力,又增加了船舶潜在的作业危险性。抬船高度与波浪条件和反铲作业时的载荷大小有关,抬船后船体自重和浮力的差值Ft直接作用在装腿上,3桩受力大小和反铲挖泥船几何重心位置有关,根据分析,3桩载荷计算模型为
(6)
式中:FAt,FBt,FCt——Ft作用产生在A、B、C3桩的压力;
Ft——抬船后船体自重和浮力的差值。
由式(6)得
(7)
综上所述,将反铲挖泥船定位桩受到所有载荷合成后就可得到桩腿最终的计算模型。
4 算例
18m3反铲挖泥船船长76.55m、垂线间长为69m、型宽19.8m、型深4.8m、吃水3m、排水量3 773.7t,钢桩布置图见图7。挖掘机设备以Liebher公司的P995系列为例,动臂13.5m,斗杆长6.5m,斗容18m3,挖掘最大切削力978.6kN。
环境参数见表3。
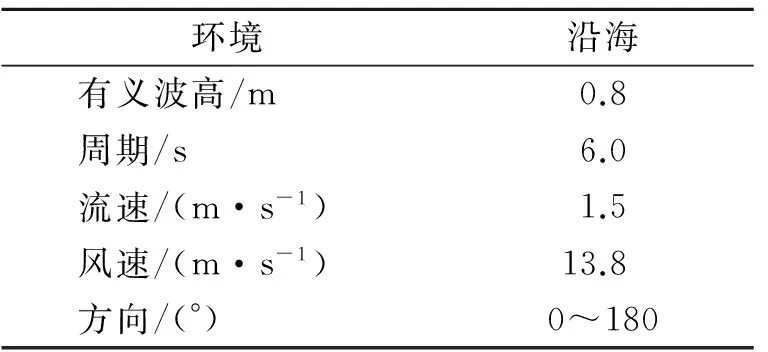
表3 环境参数
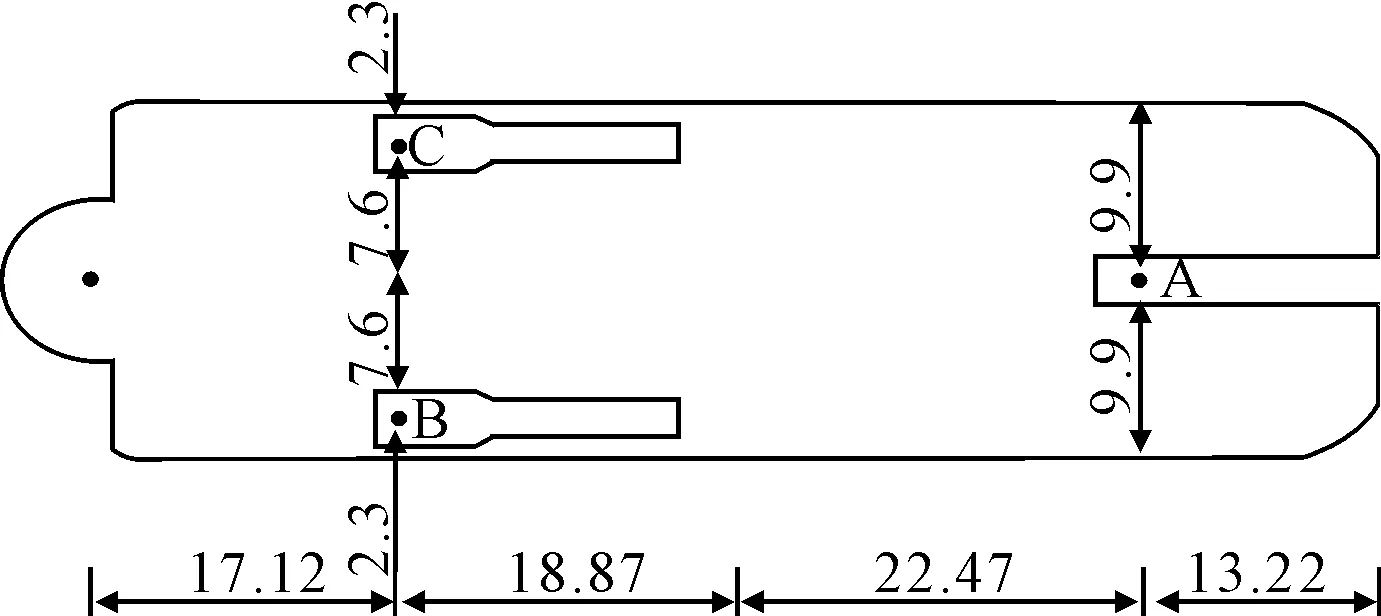
图6 钢桩布置(单位:m)
4.1 桩腿压力随抬船高度的变化
以45°环境载荷为例,假设挖掘机旋转至40°,随着抬船高度的不断增加,3个桩腿的压力也在不断增加。假设风载荷和流载荷随时间的变化不变,波浪力为周期变化,则最终反映在桩腿上的载荷变化。图8是定位桩腿压力随抬船高度变化时桩腿最大值和最小值的变化。

图7 桩腿压力随抬船高度变化
桩腿压力若是为负则表示向上拔起,为了保证船舶作业的安全和作业稳定性,抬船高度需要保证桩腿有足够的对地压力压住桩腿,经计算该船抬船高度设为0.8 m。
4.2 桩腿压力随挖掘机旋转角度α变化
以环境载荷45°方向作用船体上为例,设抬船高度为0.8 m,挖掘机从0°旋转至90°,计算桩腿载荷变化见图9、10。

图8 桩腿压力随旋转角度变化

图9 桩底弯矩随旋转角度变化
由图9、10可见,随着挖掘机角度的增大首桩(A桩)的压力减小,C桩(远离铲斗一侧的桩)的压力逐渐增大,而B桩(靠近铲斗一侧的桩)压力逐渐减小。桩底弯矩的变化相对较小。
4.3 桩腿压力随铲斗运动轨迹的变化
挖掘机铲斗的最远距离连成一个轨迹曲线,见图11~13。

图10 铲斗运动轨迹
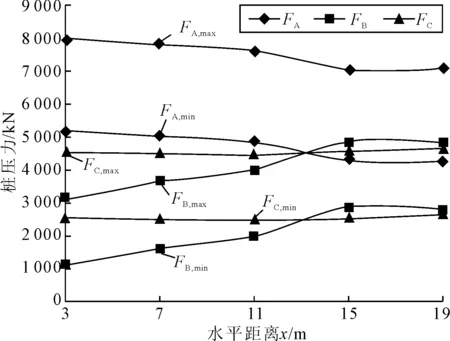
图11 桩腿压力随铲斗运动轨迹变化

图12 桩底弯矩随铲斗运动轨迹变化
以环境载荷方向45°为例,设抬船高度为0.8 m,挖掘机转动40°,桩腿压力和力矩随反铲切削轨迹变化载荷变化见图12、13。挖掘机对桩腿压力或弯矩的影响不仅与铲斗所在的位置有关(即参数l1、α、Hd)还与铲斗切削的角度θ有关。铲斗伸出距离l1的大小也对桩腿压力产生影响,挖掘深度Hd的大小对桩底弯矩产生影响;铲斗切削的角度θ接近0°或180°时对桩腿压力产生影响较大,接近90°时对桩底弯矩产生影响较大。
4.4 桩腿压力随环境载荷角度的变化
环境载荷方向在0°~180°变化时桩腿载荷变化曲线见图14,15。三桩所受压力总体变化规律相同,在90°载荷处较小;但90°载荷下,桩底弯矩较大,变化较为明显。

图13 桩腿压力随环境载荷角度变化
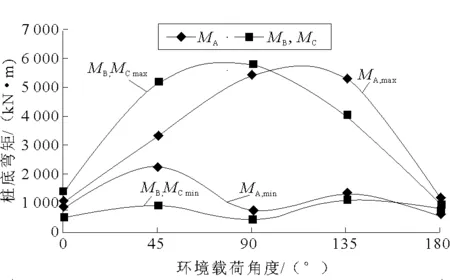
图14 桩底弯矩随环境载荷角度变化
5 结论
1)在对反铲挖泥船设计研究的基础上,得出钢桩定位反铲挖泥船外载荷计算方法和定位桩腿载荷计算模型,所建立的反铲挖泥船载荷计算模型可以为反铲挖泥船设计提供很好的载荷理论计算方法,具有很强的实际应用价值。
2)建立了反铲挖泥船在环境载荷、反铲挖泥作业载荷和船体抬升载荷等复杂外载荷共同作用下的桩腿外载荷计算模型,为反铲挖泥船定位桩腿系统设计提供了外载荷计算的理论依据。
3)结合实例计算,可以根据反铲挖泥船工作能力和作业环境计算分析确定需要的最小抬船高度,确保船舶在施工时的安全性。
4)挖掘机左右旋转角度对靠近挖掘机的两个桩腿载荷有很大影响,实际工程中应尽量采取合适的作业面宽度,尽量减少定位桩腿的最大载荷。并在作业时应尽量让船舶纵向迎流和浪进行施工作业,避免船舶处在横浪和斜浪下承受较大的环境载荷。
总之,所建立的反铲挖泥船外载荷和桩腿载荷理论计算方法在实际应用中还需要考虑船型特点,船舶设计重量重心控制和调整以及船舶在潮汐变化情况下载荷变化等其他因素的影响。
[1] 张晓莉.抓斗挖泥船钢桩的构成和功能[J].中国科技博览,2010(29):34-35.
[2] 余 龙,蒋如宏,谭家华.3 000 m~3绞吸式挖泥船钢桩台车运动仿真[J].船海工程,2007(6):96-99.
[3] 魏虎仁.液压反铲挖掘船作业基本受力计算分析[J].船舶,1996(3):39-44.
[4] API (American Petroleum Institute).API Recommended practice for planning,Designing and Constructing Fixed Offshore Platforms (Working Stress Method) API RP 2A 21th [R].2000.
[5] 陈 鹏,马 骏,黄进浩,等.基于AQWA的半潜式平台水动力分析及系泊性能计算分析[J].船海工程,2013(3):44-47.
[6] 闫功伟,欧进萍.基于AQWA的张力腿平台动力响应分析[J].东南大学学报:自然科学版,2009(S2):304-310.
[7] OCIMF.Prediction of wind and current loads on VLCCs[R].OCIMF 1994,15th Floor 96 Victoria Street London SWIE 5JW,1994.
[8] 李宗生.BACKACTER1100反铲挖泥船钢桩有限元分析[J].物流工程与管理,2012(8):102-104.
[9] 苗得雨.绞吸式挖泥船定位桩系统受力分析[D].天津:天津大学,2008.
[10] 刘伟力,聂 武,冯 峰.挖泥船定位桩设计方法分析与比较[J].哈尔滨工程大学学报,2002,04:5-7.
Study on Loads of Spuds-anchored Backhoe Dredger
JI Xiang-lana, YANG Qib, CHEN Xin-quanb
(a.School of Naval Architecture, Ocean & Civil Engineering;b.State Key Laboratory of Ocean Engineering, Shanghai Jiao Tong University, Shanghai 200240, China)
There is no systemic model and method of loads calculation for spuds-anchored backhoe dredger in the world. The characteristics of working principle of spuds-anchored backhoe dredger are studied to analyze the environmental loads and operating loads. A set of models for the loads of spuds are established, so as to provide a theoretical method of load calculation for the design and manufacture of the backhoe dredger.
backhoe dredger; spud; load analysis
10.3963/j.issn.1671-7953.2015.01.002
2014-07-01
季湘岚(1992-),男,硕士生
U674.31
A
1671-7953(2015)01-0005-06
修回日期:2014-07-09
研究方向:船舶与海洋结构物设计制造
E-mail:zhuiluotianji@126.com
