三角轮系式移动机构动力学建模及仿真
2015-04-26岳龙旺朱敬花吴利涛武可艳
岳龙旺,朱敬花,吴利涛,武可艳
(1.河南工业大学机电工程学院,河南郑州 450007;2.天津世纪天源安全卫生监测有限公司,天津 300191)
0 前言
轮椅是下肢伤残者和年老体弱者出门时必不可少的代步工具,但是传统的轮椅不具备爬楼和越障功能。随着机器人技术的发展,各种新型移动式机器人轮椅不断涌现。对于新型轮椅来说,爬楼和越障能力是衡量其性能的重要指标。具备爬楼和越障功能的移动机器人多采用轮式、腿式、履带式、复合式移动机构。履带式移动机构体积大,比较笨重,能量效率低。在平地行驶过程中劣势比较明显,不能满足快速移动的要求;腿足式移动机构结构复杂、控制难度大,目前仍处于实验室研究阶段;复合式移动机构结构复杂、控制难度大,有效载荷小;轮式移动机构机动性好、结构简单、易于控制、能量消耗低,但其越野性能较差,通常只能越过高度小于车轮半径的障碍物。为提高轮式移动机构的越障能力,国内外专家学者开发了多种轮式移动机构[2-5]。在轮式移动式机构中,三角轮系式移动机构因其既有轮式机构的轻便、灵活、高效,又能实现爬楼和越障功能而受到重视。三角轮系式移动机构的运动学、动力学特性对于保证移动式机器人的爬楼和越障性能、提高乘坐舒适性有重要影响[6-7]。
基于对三角轮系式机构分析与综合,利用拉格朗日法建立了三角轮系的动力学模型,利用MATLAB的Simulation工具箱对其工作特性进行了仿真分析,得到三角轮系控制参数与爬楼机器人工作性能的映射关系,为三角轮系式爬楼越障机器人控制系统设计奠定了基础。
1 三角轮系式移动机构
移动机构的三角轮系结构示意图如图1所示,其单侧三维结构示意图如图2所示。在平整的路面上行驶时,三角轮系中的任意两轮先着地,在运动的过程中约束系杆7不能转动只能随车轮做平移运动,此时的驱动轮系转变为定轴轮系,此时小车在平整路面可以快速行驶,由于此时的两个车轮都为驱动轮,有效利用了三角轮系的质量,也增加了车轮和地面的接触面积,提高了爬楼越障机器人在松软地面的通过能力。根据差动轮系的传动比关系,当爬楼越障机器人遇到障碍物时,系杆7将带动整个三角轮系绕中心轴6转动,通过三角轮系的翻转实现爬楼越障功能。
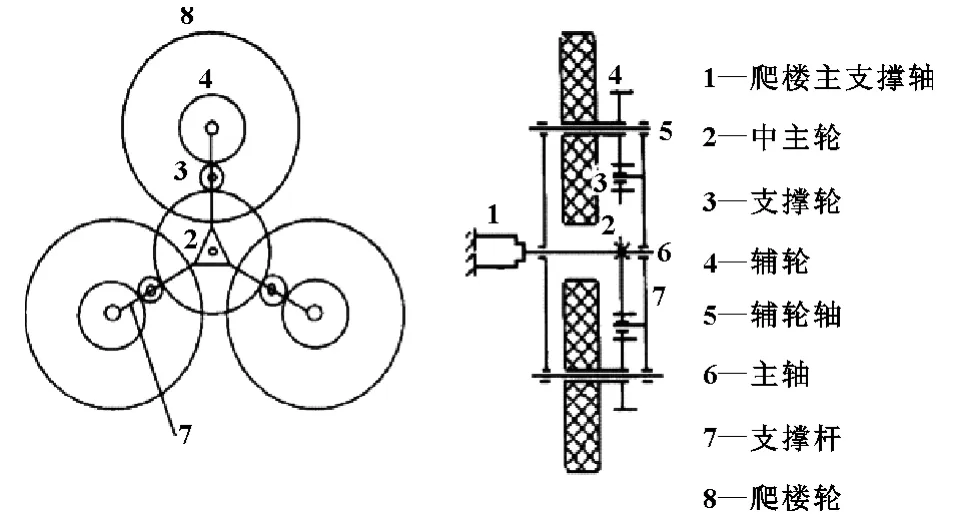
图1 三角轮系结构示意图
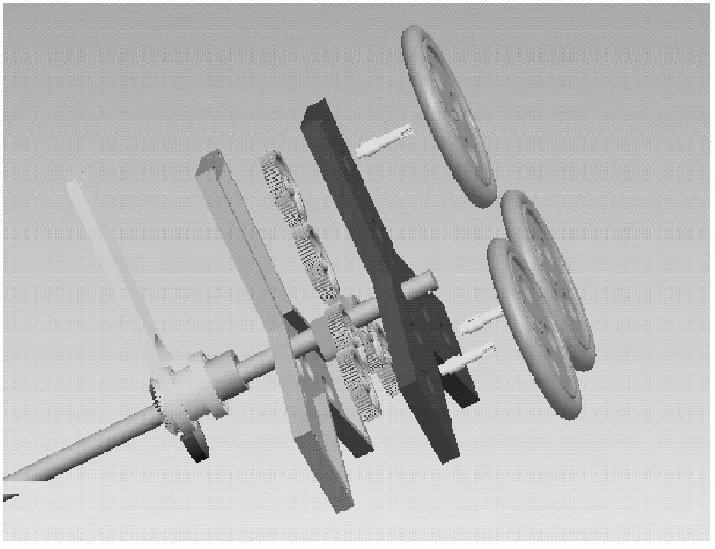
图2 三角轮系单侧三维结构示意图
2 三角轮系拉格朗日动力学模型
为简化计算,假定三角轮系与台阶间不会发生打滑现象。由于运动速度不高,所以可忽略运动系统因惯性力引起的动载荷。采用拉格朗日法对三角轮系进行动力学建模[8-9]。
2.1 三角轮系平移运动动力学模型
当三角轮系作平移运动时,只有各个轮子的自转,没有轮系的公转。当爬楼越障机器人在斜面上做平动运动时,只有一个沿x轴的自由度,取χ为广义坐标,其中θ为爬楼机器人的爬坡角度。以三角轮系的中心为研究对象来研究整个机器人的运动情况,如图3所示。
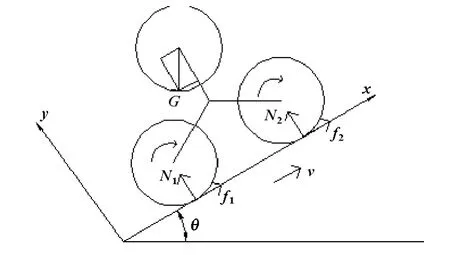
图3 三角轮系平移运动示意图
系统势能Ep即三角轮系中心的高度变化所引起的势能:
系统广义力Qχ为:
其中M力矩为电机作用在三角轮系中两个行走轮的力矩转变成的摩擦力对三角轮系的驱动力,只有当f=时爬楼机器人才向前运转。
应用拉格朗日方程:
得爬楼机器人的动力学模型:
2.2 三角轮系翻转运动动力学模型
当爬楼机器人在攀爬楼梯时两个驱动电机停止工作,只有翻转电机工作,即爬楼机器人在此过程中只发生翻转运动,因此它只有一个翻转自由度,假定其翻转角度为θ,取θ为广义坐标向量,如图4所示。
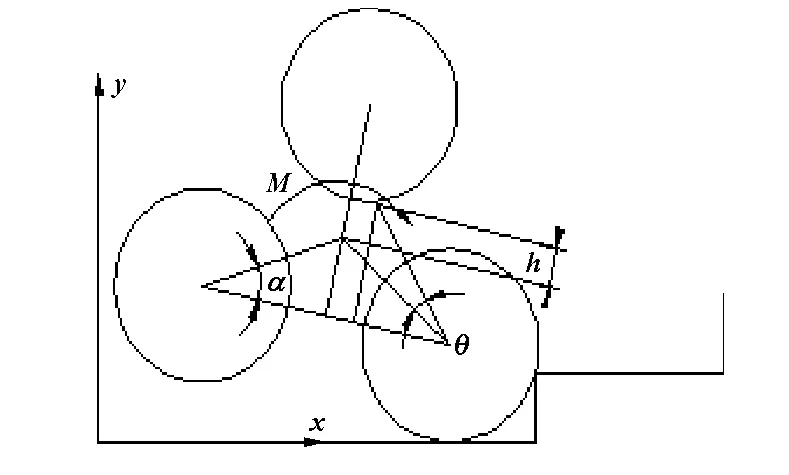
图4 三角轮系爬楼时状态示意图

则系统动能Ek为:。系统势能Ep为:
其中J为爬楼机器人的转动惯量,

其中α=30。
则拉格朗日算子L为:

系统广义力Qχ为:
Qθ=M翻转力矩
应用拉格朗日方程:
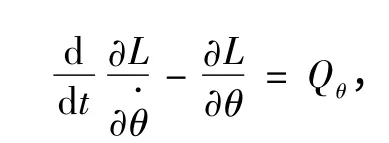
代入上式可得:

经拉普拉斯变换可得:

代入爬楼机器人的具体参数可得其实际模型的传递函数:

取重力加速g=9.8 m/s2。
3 仿真分析
利用MATALAB里面的Simulink(Dynamic System Simulation)工具箱进行仿真。MATLAB中的PID函数可以对爬楼机器人进行控制分析,利用Z-N法则来调整PID参数可以使其达到近似稳定,以实现三角轮系式移动机器人的稳定运行[8-10]。
3.1 PID控制分析
前面已经得到了爬楼机器人小车的开环传递函数,输入为电机输送给机器人小车的翻转力矩Mfanzhuan,输出为小车围绕轮组中心旋转的翻转角度θ,被控对象实际模型的传递函数为:

给系统施加一个脉冲扰动,输出量为爬楼机器人的翻转角度时,系统框图如图5所示。其中KD(s)是PID控制器的传递函数,G(s)是被控对象爬楼机器人小车的传递函数。
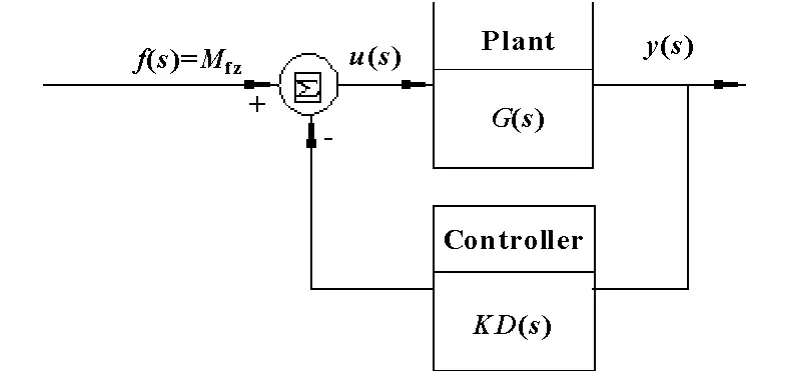
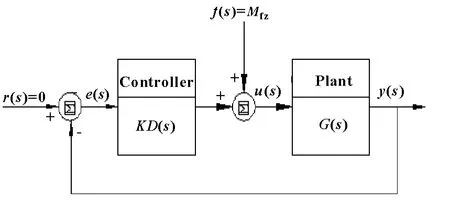
当输入r(s)=0,爬楼机器人的结构框图变成图6所示的传递函数,该系统的输出为:
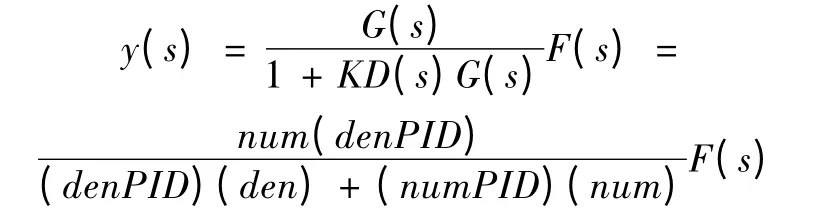
式中:num、den为爬楼机器人传递函数的分子项和分母项,numPⅠD、denPⅠD为控制器传递函数的分子项和分母项,K为PID控制器的增益。
3.2 PID控制器的参数整定
在MATLAB的Simulink工具箱中建立爬楼机器人攀爬楼梯时的模型如图7所示,其中PID controller是封装之后的PID控制器。
利用齐格勒-尼克尔斯第二法则简称Z-N法则进行PID控制器的参数整定,假设Ti=∞,Td=0,即只有比例控制kp,将比例系数kp由零逐渐增大到系统的输出首次呈现持续的等幅振荡,如图8所示,此时对应的临界增益kc=600,振荡周期Tc=0.3 s,根据Z-N法则可知:kp=0.6kc,Ti=0.5 Tc,Td=0.125·Tc,则PID控制器参数为:kp=0.6kc=360,ki=kp/Ti=1 200,kd=kp·Td=108[11]。
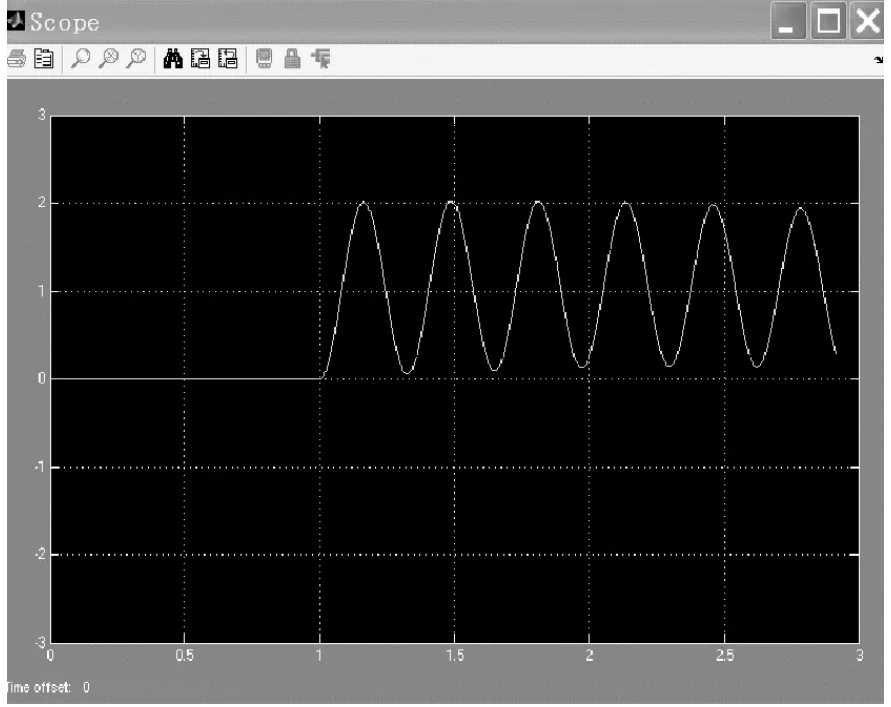
图8 P控制仿真结果图(kc=600)
3.3 仿真分析
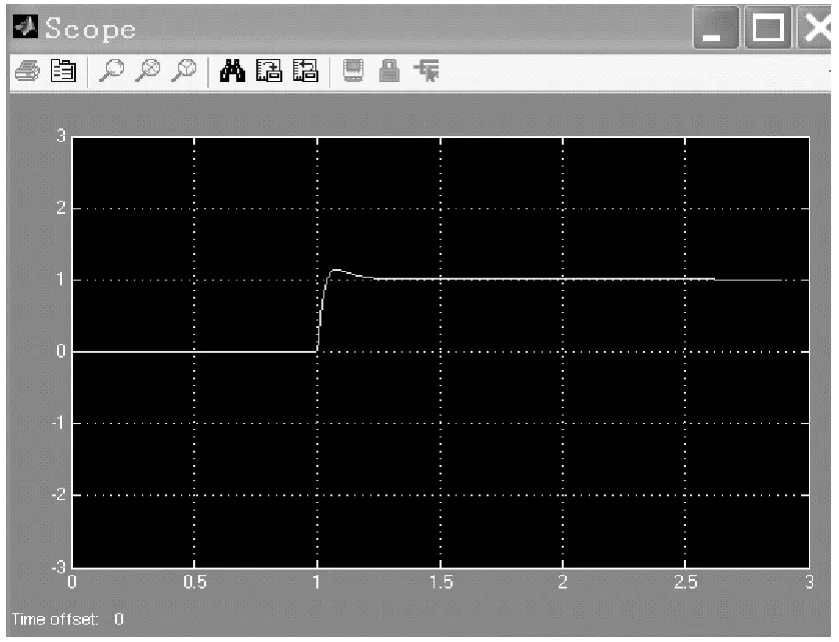
将PID参数值kp=0.6kc=360,ki=kp/Ti=1 200,kd=kp·Td=108[11],代入仿真模型,得控制系统仿真结果如图9所示。由仿真结果图可以看出,系统在1.2 s左右的时间内可以达到稳定,超调量为20%,因此此系统有较好的稳定性。
4 结束语
三角轮系式移动机构的动力学特性是影响爬楼越障机器人性能的重要因素。利用拉格朗日法对三角轮系进行动力学模型,利用MATLAB对控制系统进行仿真,分析结果对于爬楼越障机器人控制系统设计有重要参考价值。
[1]武明,马希金.一种新型爬楼梯轮椅的动力学建模及稳定性分析[J].中国生物医学工程学报,2000,19(3):47-50.
[2]NANDY G C,XU Y.Dynamic Model of a Gyroscopic Wheel[C].Robotics and Automation,1998.Proceedings.1998 IEEE International Conference on.IEEE,1998.
[3]HAYATI S,VOLPE R,et al.The Rocky 7 Rover:a Mars Science craft Prototype[C].Proceedings of IEEE International Conference on Robotics and Automation,1997.
[4]吉炎.悬臂式六轮移动机器人越障性能研究[D].长沙:中南大学,2006.
[5]BOT@4000 Mobility System,Independence Technology.L.L.C.http://www.ibotnow.com[OL].
[6]YUE Longwang,WU Keyan,LIU C B.Study of a New Stair-climbing and Obstacle-traversing Robot[J].Advanced Materials Research,2011,211:686-690.
[7]YUE Longwang,WU Keyan,TU W Q.Design and Analysis of Stair-Climbing and Obstacle-Traversing Robot[J].2011,224(2):224-225.
[8]固高科技有限公司.倒立摆实验系统[M].2005.
[9]鲁墨武,石磊.基于MATLAB的机器人建模与动力学仿真[J].制造业信息化2010,47(10):40-43.
[10]NALECZAndrze G.Influence of Vehicle and Roadway Factor on the Dynamics of Tripped Rollover[J].International Journal of Vehicle Ddsign,1989,10(3):321-346.
[11]邹伯敏.自动控制理论[M].北京:机械工业出版社,2007.