基于Gross认知重评的机器人认知情感交互模型
2015-04-24徐上谋王志良
韩 晶 解 仑 刘 欣 徐上谋 王志良
(1北京科技大学计算机与通信工程学院, 北京 100083)(2北京科技大学自动化学院, 北京 100083)
基于Gross认知重评的机器人认知情感交互模型
韩 晶1解 仑1刘 欣2徐上谋1王志良1
(1北京科技大学计算机与通信工程学院, 北京 100083)(2北京科技大学自动化学院, 北京 100083)
为了增强机器人的认知情感分析能力,依据AVS情感空间和有限状态机(FSM)提出了一种基于Gross认知重评策略的认知情感交互模型.首先,通过分析情感状态之间的欧式距离,研究外界情感刺激对情感状态转移概率的影响;然后,采用有限状态机描述了受到认知重评策略影响的情感状态转移过程;最后,根据情感状态转移概率和7种基本情感的空间坐标,得出受到刺激后机器人情感状态的空间位置.实验结果表明,与不受认知重评策略影响的情感交互模型相比,所提模型能够减少机器人对外界情感刺激的依赖,从而有效地促进了和谐的人机交互体验.
认知情感交互模型;情感状态转移概率;Gross认知重评;AVS情感空间;有限状态机
随着人机互动发展的不断深入,基于维度论的情感空间模型结合了人类情感分布的连续性和复杂性特征,成为情感计算研究的重要方向之一[1].该类模型中的每一个点代表了一种情感状态,每一个维度代表了情感状态的一类特征,只需对维度变量进行简单配置就能描述基本情感状态. Nanty等[2]提出了一种基于愉悦度、激活度和优势度3个维度的PAD(pleasure-arousal-dominance)情感空间模型. AVS(arousal-valence-stance)情感空间模型通过使用3种情感特征(唤醒度、效价、姿态)对某一种外部刺激进行标记,进而将其映射到情感空间来激活某种情感状态[3].
情感的激活需要通过一系列外在因素与内在因素相互作用来实现,是一个复杂的情感状态转移过程[4].它不仅受到外界情感刺激和当前情感状态的影响,还与个体自身的情感认知能力有关.基于维度论的情感空间模型能够较为清晰地描述人类情感状态,符合人类情感的多样性,但却没有充分考虑个体认知能力对情感状态的影响.具有情感认知分析能力的机器人能够对一些突发且不可预测的事情进行调节,有助于促进自然、和谐的人机交互体验.在Gross情感调节理论中,认知重评调节策略依据个体的认知能力来理解事件,改变情感体验,从而使事情合理化[5].
本文在分析AVS情感空间中外界情感刺激对机器人当前情感状态影响的基础上,将基于个性特征的认知重评策略引入到情感状态转移过程中,利用有限状态机(FSM)构建了机器人的认知情感交互模型.然后,将情感状态转移概率与7种基本情感状态的空间坐标位置相结合,得到受外界刺激后的情感状态在情感空间中的位置.
1 基于情感空间的情感状态分析
为了便于分析,根据AVS情感空间中基本情感状态所在的位置区域[6],对7种基本情感进行量化,得到其位置矢量Ei={ai,vi,si}(i=1,2,…,7),其中E1,E2,…,E7分别表示高兴、悲伤、生气、惊讶、恐惧、厌恶和平静.将包含这7种基本情感状态在内的空间区域作为情感活动区域.
情感空间距离的远近在一定程度上能够反映出情感状态之间的转移概率,即情感状态转移概率.情感状态之间的空间距离不同,则转移概率也不同:距离越远,转移概率越小;反之则越大.本文利用欧几里得度量方法,得出外界情感刺激Es={as,vs,ss}到7种基本情感状态Ei={ai,vi,si}(i=1,2,…,7)之间的距离为
i=1,2,…,7
(1)
根据情感空间距离DEsi,可以将每一类基本情感状态划分为多个不同的等级xi=f(DEsi).各个等级的情感状态与基本情感状态的转移概率近似服从高斯分布[7].那么,可以得出外界情感刺激向7种基本情感状态转移的概率为
i=1,2,…,7
(2)
式中,μi,σi分别为第i种基本情感状态的期望和方差,其值由情感等级的分布决定.

2 认知情感交互模型
2.1 Gross认知重评策略
Gross认知重评策略是指个体对于事件情感方面的理解,具有调节个体情感的作用.在认知重评能力足够强时,即将被触发的情感类型可能会被改变. 个体的认知重评能力受到来自个性特征、周围环境和情感类型等多种因素的影响.本文主要分析基于个性特征的认知重评策略对情感状态转移的影响.大五人格理论(five factor model,FFM)是由McCrae等[8]运用统计分析方法提出的,能够分析个体的多种人格特征之间的相互关系.目前,该理论广泛应用于机器人的情感状态研究中[9-10].随着个性特征的增加,认知重评能力不断增强直至逼近某一临界值.为了描述这一过程,认知重评参数的表达式可表示为
(3)
式中,cl∈[0,1]表示第l种人格的评估值在5种人格评估值中所占的比例,由 NEO-PI-R人格量表对大五人格进行评估得到;ρ为个性特征的认知重评能力.
2.2 基于FSM的情感状态转移
个体情感的激活不仅与外界输入刺激有关,还与个体当前的情感状态和认知能力有关(见图1).这一固有性质与有限状态机的功能描述是吻合的,因此本文采用有限状态机对情感状态转移概率进行分析.

图1 情感状态转移过程
i=1,2,…,7
(4)
2.3 情感状态的空间坐标表示

(5)
(6)
式中,(ai,vi,si)为第i种基本情感状态的坐标.
在情感状态转移概率已知的情况下,利用所提方法能够得到AVS情感空间活动领域内任意情感状态的坐标点,从而丰富了机器人的情感状态类型.
3 仿真与实验
3.1 情感状态转移概率分析
根据式(6)可得,在AVS情感空间活动区域中受到外界刺激后机器人的情感状态向第i种基本情感状态转移的概率曲线(见图2).显然,与不受认知重评策略约束的情感状态转移曲线相比,受到认知重评策略约束的情感状态转移概率值均偏低.此现象表明认知重评策略对机器人的情感状态转移起到了一定的调节作用,减少了机器人情感状态对外界情感刺激的过度依赖.
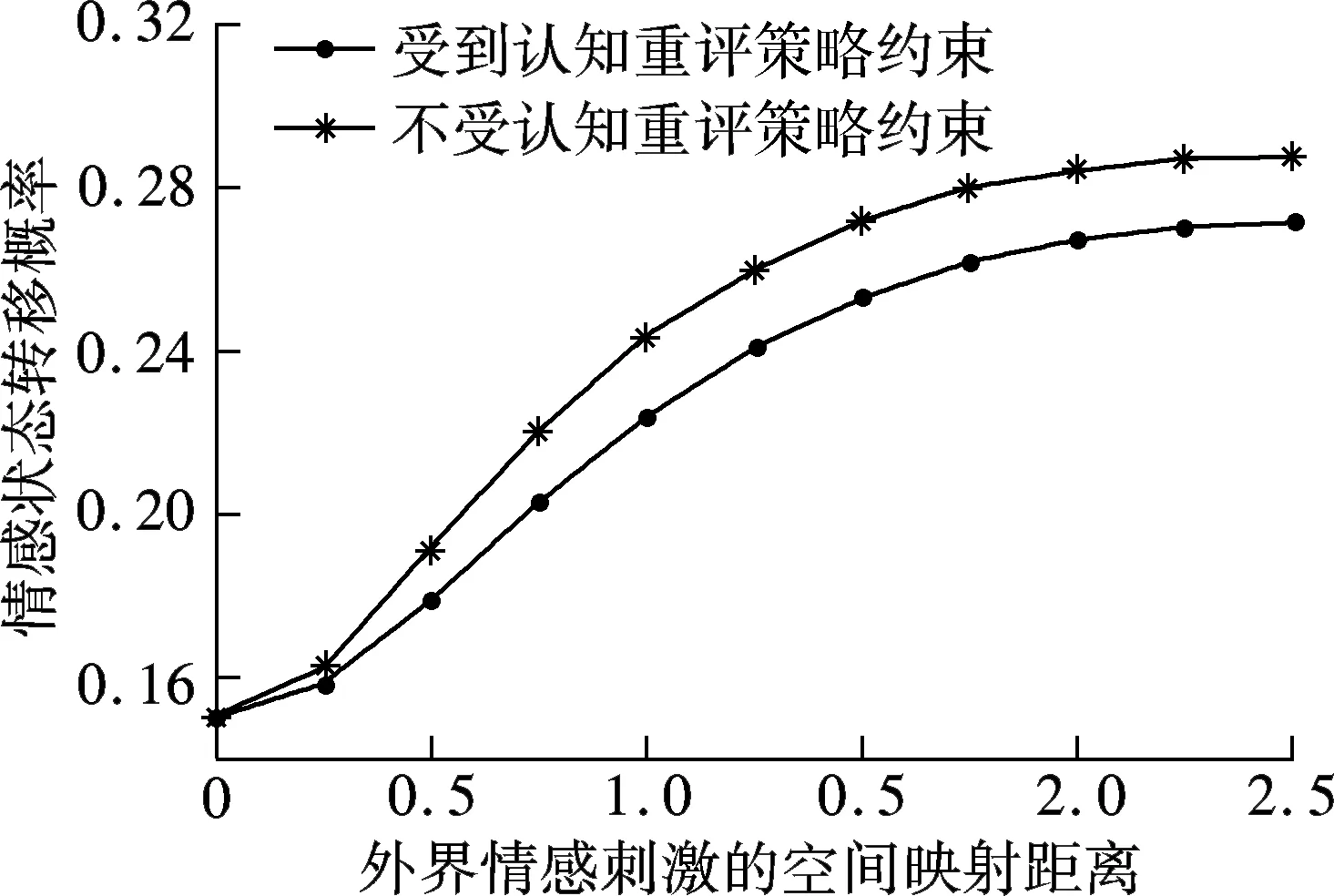
图2 情感状态转移概率比较
当外界刺激相同时,不同认知重评参数下情感状态向7种基本情感状态转移的概率也不相同.其情感状态转移概率的变化如图3所示.由图可知,认知重评参数越强,个体对外界输入刺激的情感制约能力越强,即越趋于平静状态.
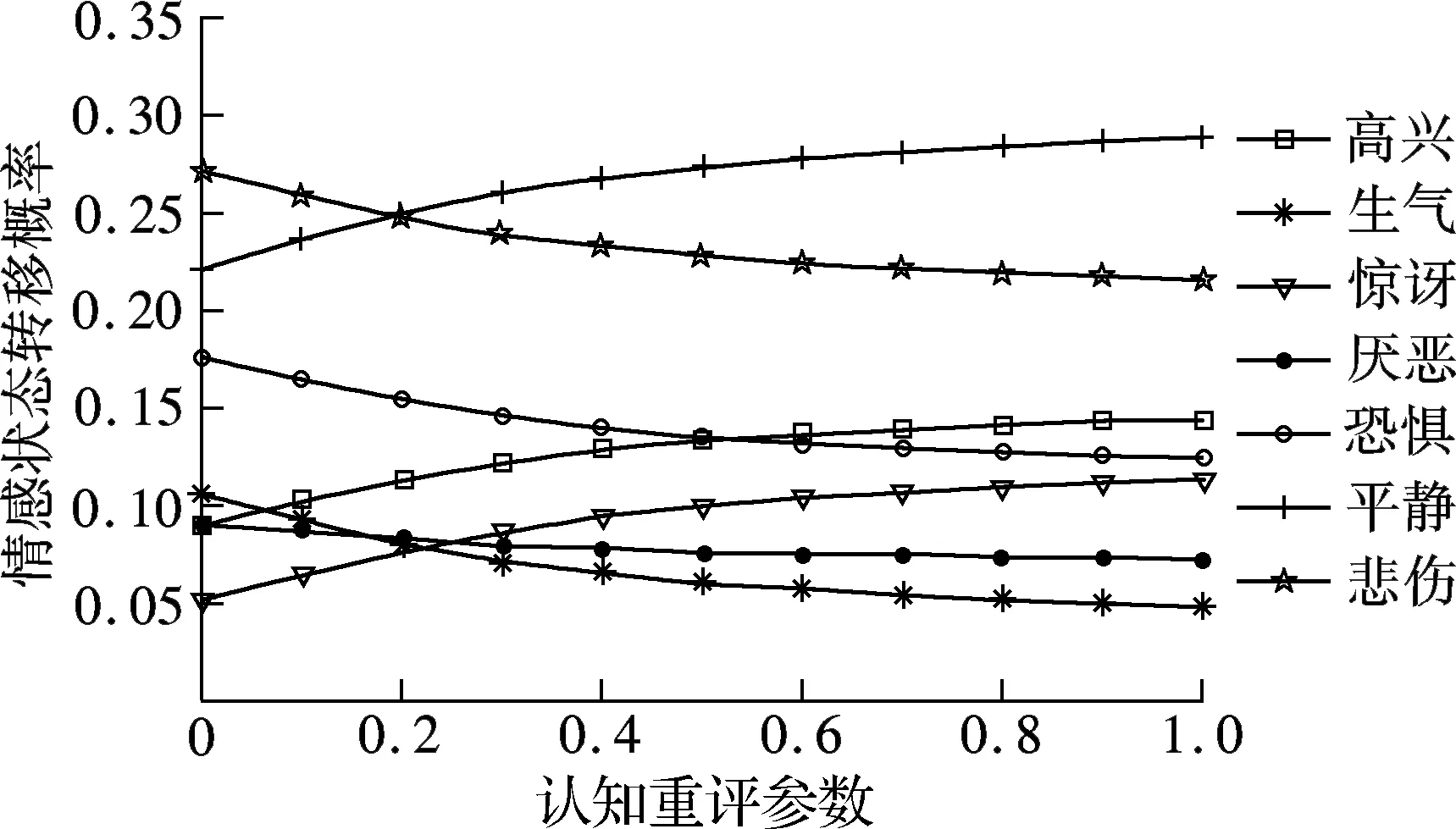
图3 不同认知重评参数下机器人情感状态转移概率
为了更直观地了解认知重评策略对机器人情感状态变化的影响,基于情感状态空间分析了不同认知重评策略下情感的空间变化轨迹.假设机器人的初始情感状态点为Et={1.076 9,0.692 3,0},在某段时间内给予5次相同的外界情感刺激Es={6,4.5,1.5},得到认知重评参数τ=0.4,0.8的情况下机器人的情感空间位置变化情况(即情感状态的变化),结果见图4.图中,“*”为外界情感刺激的空间位置.由图可知,在受到多次外界情感刺激后,机器人的情感状态点逐渐向Es所在位置逼近.但是由于受到认知重评策略的影响,此逼近速度不断下降.在5次相同的外界刺激下,与τ=0.8时的情感运动轨迹相比,τ=0.4时情感状态向外界刺激点的逼近速率更快.由此表明,认知重评策略能够有效地控制情感状态的转移,并且外界刺激对机器人的影响会随着认知能力的增强而减弱.

图4 受到多次相同刺激后机器人的情感状态空间变化轨迹
3.2 认知情感交互模型的有效性验证
在机器人系统平台上对所提模型的有效性进行实验验证.针对同一种情感状态,由于情感强度不同,人类表达情感的动作也不相同.基于此,该实验依据情感强度将机器人的情感动作进行了细分(见表1).

表1 机器人的动作与情感状态对照表
实验中,由受试者选择机器人系统内人脸表情库中的图片(已标定情感类型);然后,机器人提取图片的情感信息,并利用所提模型进行情感状态转移分析;最后,通过肢体动作将情感状态反馈给受试者.人机交互过程中机器人对不同强度下悲伤情感的反馈动作如图5所示.

(a) 低强度

(b) 中强度

(c) 高强度
邀请30位受试者并均分为2组,第1组受试者体验不受认知重评策略约束的机器人情感反馈;第2组受试者体验受到认知重评策略约束的机器人情感反馈.采用Likert量表对机器人不同情感反馈动作的满意度进行调查.其中满意度被分为5个等级:非常不满意(-2)、不满意(-1)、一般(0)、满意(1)和非常满意(1). 调查问卷的分数越高,满意度等级越高;反之则越低.2组受试者对机器人的满意度调查结果见图6.由图可见, 第1组受试者对机器人情感反馈的满意度均高于第2组,且在惊讶状态下的满意度差别最大.这说明引入认知重评策略的情感模型有助于促进自然、和谐的人机交互体验.

图6 机器人情感反馈的满意度统计
4 结语
本文提出了一种基于Gross认知重评策略的机器人认知情感模型.该模型根据情感状态在AVS情感空间中的分布,得到外界刺激对情感状态的影响值;并且通过情感状态转移概率计算出机器人情感状态在空间中的位置,从而实现了连续情感空间中情感状态的转移.仿真实验结果验证了该模型的有效性.然而,人类的情感转移过程是复杂的,该模型只考虑了个性特征对情感状态的影响,并不能比较完整地模拟情感交互过程.如何合理分析多种情感影响因素对情感交互模型的优化作用成为下一步研究的重点.
References)
[1]Rodriguez L F, Ramos F, Wang Y X. Cognitive computational models of emotions[C]//10thIEEEInternationalConferenceonCognitiveInformaticsandCognitiveComputing. Banff, Canada, 2011: 75-84.
[2]Nanty A, Gelin R. Fuzzy controlled PAD emotional state of a NAO robot [C]//2013IEEEConferenceonTechnologiesandApplicationsofArtificialIntelligence(TAAI). Taipei, China, 2013: 90-96.
[3]Russell J A, Bullock M. Multidimensional scaling of emotional facial expressions: similarity from preschoolers to adults [J].JournalofPersonalityandSocialPsychology, 1985, 48(5): 1290-1298.
[4]Reisenzein R, Hudlicka E, Dastani M, et al. Computational modeling of emotion: toward improving the inter-and intradisciplinary exchange [J].IEEETransactionsonAffectiveComputing, 2013, 4(3): 246-266.
[5]Peng X L, Xie L, Liu X, et al. Emotional state transition model based on stimulus and personality characteristics [J].ChinaCommunications, 2013, 10(6): 146-155.
[6]Breazeal C. Function meets style: insights from emotion theory applied to HRI [J].IEEETransactionsonSystems,Man,andCybernetics:PartC:ApplicationsandReviews, 2004, 34(2): 187-194.
[7]孙佩宏,陶霖密.PAD情感空间中情感距离度量方法[C]//第四届和谐人机环境联合学术会议.中国,武汉,2008:638-645. Sun Peihong, Tao Linmi. Emotional distance measurement method in PAD emotional space [C]//The4thJointAcademicConferenceonHarmoniousMan-MachineEnvironment. Wuhan, China, 2008: 638-645. (in Chinese)
[8]McCrae R R, Costa P T. Validation of the five-factor model of personality across instruments and observers [J].JournalofPersonalityandSocialPsychology, 1987, 51(1): 81-90.
[9]Han M J, Lin C H, Song K T. Robotic emotional expression generation based on mood transition and personality model [J].IEEETransactionsonCybernetics, 2013, 43(4): 1290-1303.
[10]Hu X, Xie L, Liu X, et al. Emotion expression of robot with personality [J].MathematicalProblemsinEngineering, 2013, 2013: 132735-1-132735-10.
[11]Hupont I, Baldassarri S, Cerezo E. Facial emotional classification: from a discrete perspective to a continuous emotional space [J].PatternAnalysisandApplications, 2013, 16(1): 41-54.
Cognitive emotion interaction model of robot based on Gross cognitive reappraisal
Han Jing1Xie Lun1Liu Xin2Xu Shangmou1Wang Zhiliang1
(1School of Computer and Communication Engineering, University of Science and Technology Beijing, Beijing 100083, China)(2School of Automation and Electrical Engineering, University of Science and Technology Beijing, Beijing 100083, China)
In order to enhance the robot’s cognitive emotion analysis ability, a cognitive emotion interaction model based on the Gross cognitive reappraisal strategy is proposed according to AVS (arousal-valence-stance) emotion space and finite state machine(FSM). By analyzing the Euclidean distance between the emotional states, the influence of external emotional stimuli on the emotional state transition probability is studied. Then, the emotional state transition process affected by the congnitive reappraisal strategy is described by finite state machine. Finally, according to the emotional state transition probability and the space coordinates of seven basic emotions, the space positions of the robot’s emotional state after emotional stimuli are derived. The experimental results show that compared with the emotional interaction model without the cognitive reappraisal strategy, the proposed model can reduce the robot’s dependence on external emotional stimuli, thus effectively promoting harmonious human-computer interaction experience.
cognitive emotion interaction model; emotional state transition probability; Gross cognitive reappraisal; AVS (arousal-valence-stance) emotion space; finite state machine
10.3969/j.issn.1001-0505.2015.02.014
2014-09-05. 作者简介: 韩晶(1990—),女,博士生;解仑(联系人),男,教授,博士生导师,xielun@ustb.edu.cn.
国家自然科学基金面上资助项目(61170115)、国家自然科学基金重点资助项目(61432004)、“十二五”国家科技支撑计划资助项目(2014BAF08B04) 、北京市融合网络与泛在业务工程技术研究中心2014年度科技创新基地培育与发展工程专项资助项目.
韩晶,解仑,刘欣,等.基于Gross认知重评的机器人认知情感交互模型[J].东南大学学报:自然科学版,2015,45(2):270-274.
10.3969/j.issn.1001-0505.2015.02.014
TP242.6
A
1001-0505(2015)02-0270-05