基于隧道磁阻传感器的三维电子罗盘设计*
2015-04-17李孟委王增跃蒋孝勇李锡广
王 琪,李孟委*,王增跃,蒋孝勇,李锡广
(1.中北大学电子测试技术国家重点实验室,太原 030051;2.中北大学微系统集成研究中心,太原 030051)
基于隧道磁阻传感器的三维电子罗盘设计*
王 琪1,2,李孟委1,2*,王增跃1,2,蒋孝勇1,2,李锡广1,2
(1.中北大学电子测试技术国家重点实验室,太原 030051;2.中北大学微系统集成研究中心,太原 030051)
针对现有电子罗盘在地磁场检测时易受到外界磁场干扰而导致测量精度不高的问题,设计了基于隧道磁阻传感器(TMR)的三维电子罗盘并完成样机制作。研究了实际环境中电子罗盘的误差特性,经椭球拟合校正后,采用基于椭圆假设的椭圆拟合方法对误差进行补偿,补偿后其方位角精度可达0.85°,有效降低94.81%的方位角误差。实验结果验证了TMR传感器在电子罗盘应用的可行性。
电子罗盘;隧道磁阻传感器;罗差补偿;椭圆拟合
电子罗盘通过采集地磁场强度信号实现方位角检测,由于其成本低、灵活性好、无累积误差等特点,可用于校正陀螺的累积误差,为传统自主导航系统提供稳定精确的航向角,广泛应用于定向导航领域,如陀螺寻北仪的粗寻北[1]、捷联惯导初始对准[2]等。
目前,国外已成功将电子罗盘用于车载导航等领域,而国内很多单位正在开展对电子罗盘的相关研究,并且取得不错的成果。其中对各向异性磁阻传感器(AMR)的电子罗盘研究较多,郑州大学刘武发[3]和南京航空航天大学杨新勇[4]设计的基于AMR传感器的三维电子罗盘航向精度分别为0.6°和0.8°,但AMR传感器灵敏度偏低,且需置位/复位电路消除磁滞,使得电路复杂,不利于微小型化和降低成本;巨磁阻(GMR)传感器较AMR灵敏度偏高,中国科学院物理研究所的汤玉林[5],杭州电子科技大学的林乾浩[6]制作的基于GMR的三维电子罗盘精度为1°。但其信号强度较弱、信噪比低决定了基于GMR传感器的电子罗盘的精度提升空间不大。隧道磁阻传感器(TMR)较之AMR和GMR传感器,有良好的温度稳定性,较高的灵敏度,更宽的线性范围,更低的功耗,因此本文拟基于TMR传感器开发出较高精度的电子罗盘。
1 TMR传感器的方位角测试原理
隧道磁电阻效应(Tunneling Magneto Resistance,TMR)是指在外磁场变化时,某些磁性材料隧道结出现非常大的电阻变化的现象。TMR效应室温下磁阻变化率可达1056%[7],因此TMR传感器灵敏度极高,可用于弱磁场检测。TMR还具有功耗低、频响高等特点,适用于制作小型化高精度电子罗盘。
地磁场近似的可看为是一个棒状磁场,磁场分布由N极指向S级,在北半球地磁场倾斜指向下,如图1所示,地磁场的总矢量可分解为与地球表面平行的水平磁场分量Ho及与之垂直的磁场分量Hz,Ho与地磁场矢量的夹角称为磁倾角,Ho始终指向磁北方向,因此,通过对地磁水平分量的测量可以实现方位角的测量,这是电子罗盘设计的理论基础[8]。
Ho为两个正交水平放置的磁阻传感器测得的地磁场信号HX、HY的矢量和,其中,HX逆时针旋转至Ho的过程即为寻北的过程,该过程中HX划过的角度即为方位角。
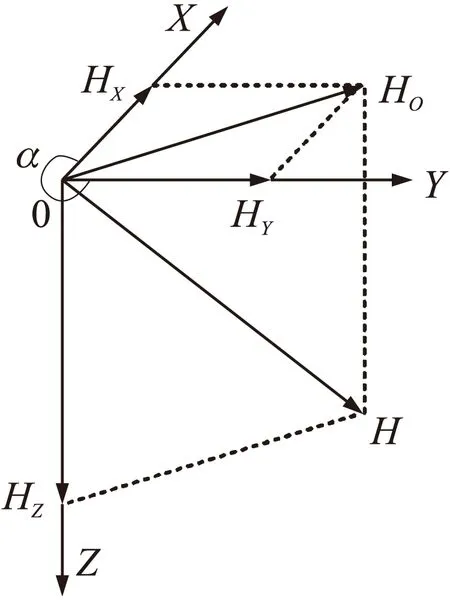
图1 地球磁场三维矢量示意图
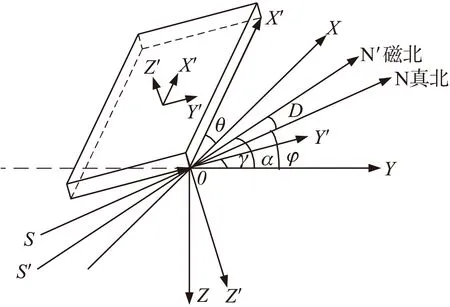
图2 载体坐标系与地理坐标系
由图1有:
α=arctan(HY/HX)
(1)

(2)
磁北方向与真北方向的夹角称为磁偏角D,当磁北方向实际偏东时,地磁偏角为正,反之为负。因此真实的方位角可计算为:
φ=α±D
(3)
方位角φ的测量是建立在电子罗盘所在载体坐标系与地理坐标系重合的基础上,而当电子罗盘系统所在平面与水平面不一致时,如图2所示,磁阻传感器的测量值无法直接表示Ho的两个水平分量,因此需要坐标变换,将磁传感器的测得的载体坐标系三轴上的分量换算到地理坐标系中[9-11]。
根据选取的载体坐标系“北东天”,该坐标系绕Y轴旋转θ,再绕X轴旋转γ,即还原到地理坐标系中,该过程可由以下公式描述:
(4)
其中,Hx、Hy、Hz为磁阻传感器测得的地磁场在载体坐标系上各轴上的分量,而HX、HY、HZ为地磁场在地理坐标系中的分量。θ为俯仰角,为绕Y轴旋转时,X轴转过的角度。γ为横滚角,为绕X轴旋转时,Y轴转过的角度,如图3所示,俯仰角与横滚角可通过三轴加速度计感测重力场后通过解算得到,具体计算方法如下:
θ=-arcsin[ax(g)/g]
γ=-arcsin[ay(g)/g]
(5)
可得:
(6)
将此公式带入式(2)、式(3)中,可得到真实的方位角。

图3 横滚角、俯仰角示意图
2 系统设计
根据电子罗盘的测量原理,TMR传感器测得地磁场在载体坐标系中的磁场分量,加速度计敏感地球重力场信息,求得载体的姿态角。通过对两者信息的融合,完成磁场测量值从载体坐标系到地理坐标系的校正过程,校正后的地磁信息可进行方位角的解算,以此实现电子罗盘的基本功能。
电子罗盘由信息获取、信号调理、信息处理、数据输出4个模块组成,如图4所示。TMR传感器与加速度计分别获取地磁与姿态信息,输出电压信号经过信号调理之后,送入微处理器中进行实时姿态计算、坐标变换、系统误差补偿,得到载体的姿态参数,将它们通过串口在上位机实时输出显示[12]。

图4 系统总框图

图5 信号调理电路图
2.1 硬件设计
传感器是整个电子罗盘的前端,只有对地磁场的准确采集,才能保证系统正常工作。地磁场0.400 Gauss~0.625 Gauss磁场强度较弱,对硬件设计提出很高的要求。
由于MMLP44F的输出为惠斯通电桥输出,无缓冲,驱动能力较弱,因此,后端放大电路中采用适合对弱驱动的传感信号进行放大的仪表放大器。AD623是一款低噪声、高精度、高输入阻抗的仪表放大器,放大倍数可由外接电阻RG直接调节。AD623的输出电压为:
Vout=G×[(+IN)-(-IN)]+VREF
(7)
选择AD623的共模电压VREF为2.048V,根据磁阻传感器的输出电压范围(±128mV)及放大器电压输出范围(0~5V)以及后续ADC电路的输入电压范围(0~4.096V),求得放大倍数G为:
(8)
为满足实际电路的需要,充分考虑到电路中的偏置电压、温漂和外界磁场干扰等因素,为留有裕量,将放大倍数选择为11,计算反馈电阻值为:
(9)
模数转换模块选择四通道16位的电荷再分配逐次逼近型模数转换器AD7689,其有效位数可达15.039,内部集成SPI接口用于内部寄存器配置和转换结果的发送。信号调理硬件电路图如图5所示。
微处理器选用ST公司的STM32F103C8T6,该芯片基于Cortex-M3内核架构,处理速度快,低功耗、高性能、集成丰富的片上外设。其主要工作是控制ADC对磁场数据进行采集和处理,根据重力加速度值计算倾角,补偿系统误差,对电子罗盘方位角解算并按特定的协议发送数据及上位机实时显示等。系统采用RS232总线与上位机通信,相关电平转换采用SP3232芯片。
2.2 软件设计
基于KEILMDK开发环境,使用C语言编写进行软件部分设计,主要分为校正和测试两部分,其中包括数据采集及处理、误差补偿、方位角计算等,程序流程图如图6所示。
电子罗盘的误差主要来源为安装误差、制造误差及罗差。制造误差可通过椭球拟合法进行校正,而罗差是电子罗盘系统测量方位角时所特有的一种误差,对电子罗盘测量精度的影响也最为复杂。
电子罗盘周围存在的磁性物质或者会对磁场强度产生影响的物质,使得磁阻传感器测得的地球磁场发生偏差。干扰磁场可以分为矫顽力较大的铁磁物质和电气设备等产生的硬铁磁场和由矫顽力较小的铁磁物质受周围铁磁物质的影响后产生的软铁磁场。干扰磁场对电子罗盘测量结果产生的误差称为罗差。硬铁磁场表现为附加在载体坐标系X、Y、Z方向上的一个固定的偏移量。而软磁磁场随着电子罗盘的方位变化,其大小和方向均发生改变[13-14]。
罗差补偿算法有多种[15-17],其中基于椭圆假设的补偿算法是根据Michel Moulin等提出的假设,在无外界磁场的干扰下,X、Y轴磁阻传感器的输出可构成一个标准圆,但是周围环境的干扰磁场会使圆发生变形甚至扭曲成一个椭圆。因此将罗差补偿抽象为求取使椭圆变形的各项误差系数的过程[18-19]。
3 实验测试与分析
实验中,将样机固定在无磁转台上进行实验测试。无磁转台保持水平,首先对电子罗盘样机进行旋转,使其姿态位置尽量覆盖拟合椭球所在三维空间范围,完成椭球拟合校正,经MATLAB计算得到制造误差的相关误差参数,完成加速度计和磁阻传感器的校正[20-22]。
实际测试中,将样机在转台上水平均匀旋转一周,在0°~360°区间内,每15°作为一个测试点,通过上位机实时采集并存储该位置处的数据,实验所用转台与电路板如图7所示。

图7 样机及测试图
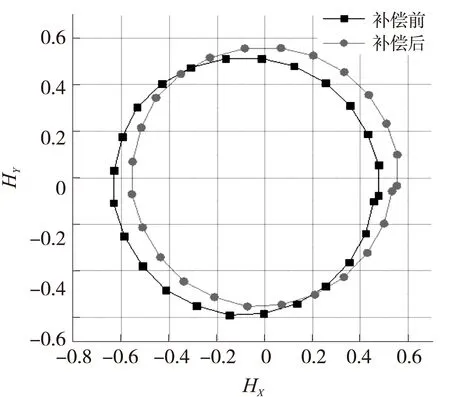
图8 椭圆拟合前后效果图
多次测量,将测得的实验数据去除粗大误差项,去除零偏,椭球拟合校正,倾角补偿等预处理后解算的方位角误差较大,最大可达16.35°。经过制造误差和罗差补偿前后的两轴水平磁场分量HX、HY的数据如图8所示。经过椭球拟合和基于椭圆假设的罗差补偿算法的补偿后,方位角误差下降到0.85°,误差大幅下降94.81%,补偿效果如图9所示。

图9 补偿结果对比图
分析实验结果,样机误差偏大,未能体现隧道磁阻效应的优越性,分析可能的原因有:①电子罗盘的三轴由分立的TMR传感器组成,各轴传感器的灵敏度不一致,且温度系数并不匹配;②实验时未将电子罗盘样机安装在壳体中,实验时存在样机安装不稳的情况,导致安装误差较大。
4 结论
本文设计的基于TMR传感器的三维电子罗盘,实现了倾角补偿和方位角的测量,采用椭圆拟合的罗差补偿算法对方位角误差进行补偿,其精度达到0.85°,有效降低了94.81%的误差,证明了TMR传感器在电子罗盘应用的可行性。但其航向精度偏低,可从以下几个方面进行改善:算法中增加对系统安装误差等误差的补偿;对加速度计的精确校正;通过对多种罗差补偿方法的对比,寻求适合的最优算法等。
[1] 林明春,夏桂锁,林玉池,等. 电子罗盘在全自动智能陀螺寻北仪中的应用[J]. 光学精密工程,2007,15(5):719.
[2] 吴周洁,鲍其莲. 电子罗盘在捷联惯导初始对准中的应用[J]. 电子测量技术,2009(1):56-58.
[3] 刘武发,蒋蓁,龚振邦. 基于磁阻和MEMS加速度传感器的电子罗盘设计及应用[J]. 兵工学报,2008,29(2):244-248.
[4] 杨新勇,黄圣国. 磁航向测量系统误差修正方法研究[J]. 仪器仪表学报,2004,25(4):466-469.
[5] 汤玉林,李俊文,翟光杰. 利用GMR效应的电子指南针[J]. 数
据采集与处理,2005,20(3):342-345.
[6] 林乾浩,钱正洪,龚天平,等. 基于GMR传感器的三轴电子罗盘[J]. 机电工程,2013,30(1):55-59.
[7] Jiang L,Naganuma H,Oogane M,et al. Large Tunnel Magnetoresistance of 1056% at Room Temperature in MgO Based Double Barrier Magnetic Tunnel Junction[J]. Applied Physics Express,2009,2(8):083002.
[8] Caruso M J. Applications of Magnetoresistive Sensors in Navigation Systems[R]. SAE Technical Paper,1997.
[9] 王勇军. 基于磁阻和加速度传感器的三轴电子罗盘研制[D]. 桂林:桂林电子科技大学,2010.
[10] 郜莉. 三维磁阻式电子罗盘的设计与实现[D]. 哈尔滨:哈尔滨工程大学,2009.
[11] 叶健. 带倾角补偿的数字式电子磁罗盘设计[D]. 北京:国防科学技术大学,2009.
[12] Vcelak J,Petrucha V,Kaspar P. Compact Digital Compass with PCB Fluxgate Sensors[C]//Sensors,2006. 5th IEEE Conference on. IEEE,2006:859-861.
[13] 蒋海涛,李随源. 基于MEMS器件的电子罗盘系统设计[J]. 测控技术,2012,31(4):32-35.
[14] 邵婷婷,马建仓,胡士峰,等. 电子罗盘的倾斜及罗差补偿算法研究[J]. 传感技术学报,2007,20(6):1335-1337.
[15] 陈瑜,张铁民,彭孝东. 一种磁阻式电子罗盘测试和标定方法研究[J]. 传感技术学报,2014,27(5):622-626.
[17] 张晓明,赵剡. 基于椭圆约束的新型载体磁场标定及补偿技术[J]. 仪器仪表学报,2009(11):2438-2443.
[18] Bonnet S,Bassompierre C,Godin C,et al. Calibration Methods for Inertial and Magnetic Sensors[J]. Sensors and Actuators A:Physical,2009,156(2):302-311.
[19] Fang J,Sun H,Cao J,et al. A Novel Calibration Method of Magnetic Compass Based on Ellipsoid Fitting[J]. Instrumentation and Measurement,IEEE Transactions on,2011,60(6):2053-2061.
[20] 李杰,田晓春,范玉宝,等. 基于椭球拟合的弹载MIMU现场快速标定技术[J]. 弹箭与制导学报,2013(1):10-12.
[21] 范玉宝,李杰,张晓明,等. 基于椭球拟合的微惯性测量组合现场快速标定方法[J]. 传感技术学报,2012,24(11):1547-1550.
[22] 张樨,李杰,蒋窍,等. 基于椭球拟合的三轴磁传感器快速标定补偿方法[J]. 机械工程与自动化,2012(4):163-165.

王 琪(1990-),女,山西长治人,中北大学电子测试技术国家级重点实验室在读研究生,主要从事惯性导航方面的研究,lmwnuc@163.com;

李孟委(1975-),男,副教授,主要开展新原理MEMS惯性传感器及导航研究,专注于MEMS陀螺研究,对新原理、新效应的微纳米器件创新设计感兴趣。
Design of a Three-Dimensional Electronic Compass Based onTunneling Magneto Resistance Sensor*
WANGQi1,2,LIMengwei1,2*,WANGZengyue1,2,JIANGXiaoyong1,2,LIXiguang1,2
(1.Science and Technology on Electronic Test and Measurement Laboratory,North University of China,Taiyuan 030051,China;2.Center for Microsystem Intergration,Ministry of Education,North University of China,Taiyuan 030051,China)
Existing electronic compass is vulnerable to be distracted by the Magnetic Field in external environment,which leads to low accuracy. To solve this problem,a three-dimensional electronic compass is designed based on Tunneling Magneto Resistance sensor and a prototype is made. The error characteristics of compass in a real environment is studied,and ellipse hypothesis are carried out to compensate the azimuth error after ellipsoid-fitting correction. Through experimental tests,the compensation effect of the ellipse hypothesis method,which compensated azimuth accuracy of up to 0.85° and effectively reducing 94.81% of the azimuth error. Experimental results show that applying TMR sensor to electronic compass is feasible.
electronic compass;TMR sensor;compensation of magnetic deviation;ellipse fitting
项目来源:兵科基金项目(622010750516);总装基金项目(9140A09011313BQ014118);山西省攻关项目(20130321014-04)
2015-03-17 修改日期:2015-05-02
C:7310L
10.3969/j.issn.1004-1699.2015.06.020
TP212
A
1004-1699(2015)06-0895-05